mirror of
https://github.com/lllyasviel/stable-diffusion-webui-forge.git
synced 2026-05-11 00:10:09 +00:00
upload a cn
This commit is contained in:
185
extensions-builtin/sd_forge_controlnet/.gitignore
vendored
Normal file
185
extensions-builtin/sd_forge_controlnet/.gitignore
vendored
Normal file
@@ -0,0 +1,185 @@
|
||||
# Byte-compiled / optimized / DLL files
|
||||
__pycache__/
|
||||
*.py[cod]
|
||||
*$py.class
|
||||
|
||||
# C extensions
|
||||
*.so
|
||||
|
||||
# Distribution / packaging
|
||||
.Python
|
||||
build/
|
||||
develop-eggs/
|
||||
dist/
|
||||
downloads/
|
||||
eggs/
|
||||
.eggs/
|
||||
lib/
|
||||
lib64/
|
||||
parts/
|
||||
sdist/
|
||||
var/
|
||||
wheels/
|
||||
share/python-wheels/
|
||||
*.egg-info/
|
||||
.installed.cfg
|
||||
*.egg
|
||||
MANIFEST
|
||||
|
||||
# PyInstaller
|
||||
# Usually these files are written by a python script from a template
|
||||
# before PyInstaller builds the exe, so as to inject date/other infos into it.
|
||||
*.manifest
|
||||
*.spec
|
||||
|
||||
# Installer logs
|
||||
pip-log.txt
|
||||
pip-delete-this-directory.txt
|
||||
|
||||
# Unit test / coverage reports
|
||||
htmlcov/
|
||||
.tox/
|
||||
.nox/
|
||||
.coverage
|
||||
.coverage.*
|
||||
.cache
|
||||
nosetests.xml
|
||||
coverage.xml
|
||||
*.cover
|
||||
*.py,cover
|
||||
.hypothesis/
|
||||
.pytest_cache/
|
||||
cover/
|
||||
|
||||
# Translations
|
||||
*.mo
|
||||
*.pot
|
||||
|
||||
# Django stuff:
|
||||
*.log
|
||||
local_settings.py
|
||||
db.sqlite3
|
||||
db.sqlite3-journal
|
||||
|
||||
# Flask stuff:
|
||||
instance/
|
||||
.webassets-cache
|
||||
|
||||
# Scrapy stuff:
|
||||
.scrapy
|
||||
|
||||
# Sphinx documentation
|
||||
docs/_build/
|
||||
|
||||
# PyBuilder
|
||||
.pybuilder/
|
||||
target/
|
||||
|
||||
# Jupyter Notebook
|
||||
.ipynb_checkpoints
|
||||
|
||||
# IPython
|
||||
profile_default/
|
||||
ipython_config.py
|
||||
|
||||
# pyenv
|
||||
# For a library or package, you might want to ignore these files since the code is
|
||||
# intended to run in multiple environments; otherwise, check them in:
|
||||
# .python-version
|
||||
|
||||
# pipenv
|
||||
# According to pypa/pipenv#598, it is recommended to include Pipfile.lock in version control.
|
||||
# However, in case of collaboration, if having platform-specific dependencies or dependencies
|
||||
# having no cross-platform support, pipenv may install dependencies that don't work, or not
|
||||
# install all needed dependencies.
|
||||
#Pipfile.lock
|
||||
|
||||
# poetry
|
||||
# Similar to Pipfile.lock, it is generally recommended to include poetry.lock in version control.
|
||||
# This is especially recommended for binary packages to ensure reproducibility, and is more
|
||||
# commonly ignored for libraries.
|
||||
# https://python-poetry.org/docs/basic-usage/#commit-your-poetrylock-file-to-version-control
|
||||
#poetry.lock
|
||||
|
||||
# pdm
|
||||
# Similar to Pipfile.lock, it is generally recommended to include pdm.lock in version control.
|
||||
#pdm.lock
|
||||
# pdm stores project-wide configurations in .pdm.toml, but it is recommended to not include it
|
||||
# in version control.
|
||||
# https://pdm.fming.dev/#use-with-ide
|
||||
.pdm.toml
|
||||
|
||||
# PEP 582; used by e.g. github.com/David-OConnor/pyflow and github.com/pdm-project/pdm
|
||||
__pypackages__/
|
||||
|
||||
# Celery stuff
|
||||
celerybeat-schedule
|
||||
celerybeat.pid
|
||||
|
||||
# SageMath parsed files
|
||||
*.sage.py
|
||||
|
||||
# Environments
|
||||
.env
|
||||
.venv
|
||||
env/
|
||||
venv/
|
||||
ENV/
|
||||
env.bak/
|
||||
venv.bak/
|
||||
|
||||
# Spyder project settings
|
||||
.spyderproject
|
||||
.spyproject
|
||||
|
||||
# Rope project settings
|
||||
.ropeproject
|
||||
|
||||
# mkdocs documentation
|
||||
/site
|
||||
|
||||
# mypy
|
||||
.mypy_cache/
|
||||
.dmypy.json
|
||||
dmypy.json
|
||||
|
||||
# Pyre type checker
|
||||
.pyre/
|
||||
|
||||
# pytype static type analyzer
|
||||
.pytype/
|
||||
|
||||
# Cython debug symbols
|
||||
cython_debug/
|
||||
|
||||
# PyCharm
|
||||
# JetBrains specific template is maintained in a separate JetBrains.gitignore that can
|
||||
# be found at https://github.com/github/gitignore/blob/main/Global/JetBrains.gitignore
|
||||
# and can be added to the global gitignore or merged into this file. For a more nuclear
|
||||
# option (not recommended) you can uncomment the following to ignore the entire idea folder.
|
||||
#.idea
|
||||
*.pt
|
||||
*.pth
|
||||
*.ckpt
|
||||
*.bin
|
||||
*.safetensors
|
||||
|
||||
# Editor setting metadata
|
||||
.idea/
|
||||
.vscode/
|
||||
detected_maps/
|
||||
annotator/downloads/
|
||||
|
||||
# test results and expectations
|
||||
web_tests/results/
|
||||
web_tests/expectations/
|
||||
tests/web_api/full_coverage/results/
|
||||
tests/web_api/full_coverage/expectations/
|
||||
|
||||
*_diff.png
|
||||
|
||||
# Presets
|
||||
presets/
|
||||
|
||||
# Ignore existing dir of hand refiner if exists.
|
||||
annotator/hand_refiner_portable
|
||||
674
extensions-builtin/sd_forge_controlnet/LICENSE
Normal file
674
extensions-builtin/sd_forge_controlnet/LICENSE
Normal file
@@ -0,0 +1,674 @@
|
||||
GNU GENERAL PUBLIC LICENSE
|
||||
Version 3, 29 June 2007
|
||||
|
||||
Copyright (C) 2007 Free Software Foundation, Inc. <https://fsf.org/>
|
||||
Everyone is permitted to copy and distribute verbatim copies
|
||||
of this license document, but changing it is not allowed.
|
||||
|
||||
Preamble
|
||||
|
||||
The GNU General Public License is a free, copyleft license for
|
||||
software and other kinds of works.
|
||||
|
||||
The licenses for most software and other practical works are designed
|
||||
to take away your freedom to share and change the works. By contrast,
|
||||
the GNU General Public License is intended to guarantee your freedom to
|
||||
share and change all versions of a program--to make sure it remains free
|
||||
software for all its users. We, the Free Software Foundation, use the
|
||||
GNU General Public License for most of our software; it applies also to
|
||||
any other work released this way by its authors. You can apply it to
|
||||
your programs, too.
|
||||
|
||||
When we speak of free software, we are referring to freedom, not
|
||||
price. Our General Public Licenses are designed to make sure that you
|
||||
have the freedom to distribute copies of free software (and charge for
|
||||
them if you wish), that you receive source code or can get it if you
|
||||
want it, that you can change the software or use pieces of it in new
|
||||
free programs, and that you know you can do these things.
|
||||
|
||||
To protect your rights, we need to prevent others from denying you
|
||||
these rights or asking you to surrender the rights. Therefore, you have
|
||||
certain responsibilities if you distribute copies of the software, or if
|
||||
you modify it: responsibilities to respect the freedom of others.
|
||||
|
||||
For example, if you distribute copies of such a program, whether
|
||||
gratis or for a fee, you must pass on to the recipients the same
|
||||
freedoms that you received. You must make sure that they, too, receive
|
||||
or can get the source code. And you must show them these terms so they
|
||||
know their rights.
|
||||
|
||||
Developers that use the GNU GPL protect your rights with two steps:
|
||||
(1) assert copyright on the software, and (2) offer you this License
|
||||
giving you legal permission to copy, distribute and/or modify it.
|
||||
|
||||
For the developers' and authors' protection, the GPL clearly explains
|
||||
that there is no warranty for this free software. For both users' and
|
||||
authors' sake, the GPL requires that modified versions be marked as
|
||||
changed, so that their problems will not be attributed erroneously to
|
||||
authors of previous versions.
|
||||
|
||||
Some devices are designed to deny users access to install or run
|
||||
modified versions of the software inside them, although the manufacturer
|
||||
can do so. This is fundamentally incompatible with the aim of
|
||||
protecting users' freedom to change the software. The systematic
|
||||
pattern of such abuse occurs in the area of products for individuals to
|
||||
use, which is precisely where it is most unacceptable. Therefore, we
|
||||
have designed this version of the GPL to prohibit the practice for those
|
||||
products. If such problems arise substantially in other domains, we
|
||||
stand ready to extend this provision to those domains in future versions
|
||||
of the GPL, as needed to protect the freedom of users.
|
||||
|
||||
Finally, every program is threatened constantly by software patents.
|
||||
States should not allow patents to restrict development and use of
|
||||
software on general-purpose computers, but in those that do, we wish to
|
||||
avoid the special danger that patents applied to a free program could
|
||||
make it effectively proprietary. To prevent this, the GPL assures that
|
||||
patents cannot be used to render the program non-free.
|
||||
|
||||
The precise terms and conditions for copying, distribution and
|
||||
modification follow.
|
||||
|
||||
TERMS AND CONDITIONS
|
||||
|
||||
0. Definitions.
|
||||
|
||||
"This License" refers to version 3 of the GNU General Public License.
|
||||
|
||||
"Copyright" also means copyright-like laws that apply to other kinds of
|
||||
works, such as semiconductor masks.
|
||||
|
||||
"The Program" refers to any copyrightable work licensed under this
|
||||
License. Each licensee is addressed as "you". "Licensees" and
|
||||
"recipients" may be individuals or organizations.
|
||||
|
||||
To "modify" a work means to copy from or adapt all or part of the work
|
||||
in a fashion requiring copyright permission, other than the making of an
|
||||
exact copy. The resulting work is called a "modified version" of the
|
||||
earlier work or a work "based on" the earlier work.
|
||||
|
||||
A "covered work" means either the unmodified Program or a work based
|
||||
on the Program.
|
||||
|
||||
To "propagate" a work means to do anything with it that, without
|
||||
permission, would make you directly or secondarily liable for
|
||||
infringement under applicable copyright law, except executing it on a
|
||||
computer or modifying a private copy. Propagation includes copying,
|
||||
distribution (with or without modification), making available to the
|
||||
public, and in some countries other activities as well.
|
||||
|
||||
To "convey" a work means any kind of propagation that enables other
|
||||
parties to make or receive copies. Mere interaction with a user through
|
||||
a computer network, with no transfer of a copy, is not conveying.
|
||||
|
||||
An interactive user interface displays "Appropriate Legal Notices"
|
||||
to the extent that it includes a convenient and prominently visible
|
||||
feature that (1) displays an appropriate copyright notice, and (2)
|
||||
tells the user that there is no warranty for the work (except to the
|
||||
extent that warranties are provided), that licensees may convey the
|
||||
work under this License, and how to view a copy of this License. If
|
||||
the interface presents a list of user commands or options, such as a
|
||||
menu, a prominent item in the list meets this criterion.
|
||||
|
||||
1. Source Code.
|
||||
|
||||
The "source code" for a work means the preferred form of the work
|
||||
for making modifications to it. "Object code" means any non-source
|
||||
form of a work.
|
||||
|
||||
A "Standard Interface" means an interface that either is an official
|
||||
standard defined by a recognized standards body, or, in the case of
|
||||
interfaces specified for a particular programming language, one that
|
||||
is widely used among developers working in that language.
|
||||
|
||||
The "System Libraries" of an executable work include anything, other
|
||||
than the work as a whole, that (a) is included in the normal form of
|
||||
packaging a Major Component, but which is not part of that Major
|
||||
Component, and (b) serves only to enable use of the work with that
|
||||
Major Component, or to implement a Standard Interface for which an
|
||||
implementation is available to the public in source code form. A
|
||||
"Major Component", in this context, means a major essential component
|
||||
(kernel, window system, and so on) of the specific operating system
|
||||
(if any) on which the executable work runs, or a compiler used to
|
||||
produce the work, or an object code interpreter used to run it.
|
||||
|
||||
The "Corresponding Source" for a work in object code form means all
|
||||
the source code needed to generate, install, and (for an executable
|
||||
work) run the object code and to modify the work, including scripts to
|
||||
control those activities. However, it does not include the work's
|
||||
System Libraries, or general-purpose tools or generally available free
|
||||
programs which are used unmodified in performing those activities but
|
||||
which are not part of the work. For example, Corresponding Source
|
||||
includes interface definition files associated with source files for
|
||||
the work, and the source code for shared libraries and dynamically
|
||||
linked subprograms that the work is specifically designed to require,
|
||||
such as by intimate data communication or control flow between those
|
||||
subprograms and other parts of the work.
|
||||
|
||||
The Corresponding Source need not include anything that users
|
||||
can regenerate automatically from other parts of the Corresponding
|
||||
Source.
|
||||
|
||||
The Corresponding Source for a work in source code form is that
|
||||
same work.
|
||||
|
||||
2. Basic Permissions.
|
||||
|
||||
All rights granted under this License are granted for the term of
|
||||
copyright on the Program, and are irrevocable provided the stated
|
||||
conditions are met. This License explicitly affirms your unlimited
|
||||
permission to run the unmodified Program. The output from running a
|
||||
covered work is covered by this License only if the output, given its
|
||||
content, constitutes a covered work. This License acknowledges your
|
||||
rights of fair use or other equivalent, as provided by copyright law.
|
||||
|
||||
You may make, run and propagate covered works that you do not
|
||||
convey, without conditions so long as your license otherwise remains
|
||||
in force. You may convey covered works to others for the sole purpose
|
||||
of having them make modifications exclusively for you, or provide you
|
||||
with facilities for running those works, provided that you comply with
|
||||
the terms of this License in conveying all material for which you do
|
||||
not control copyright. Those thus making or running the covered works
|
||||
for you must do so exclusively on your behalf, under your direction
|
||||
and control, on terms that prohibit them from making any copies of
|
||||
your copyrighted material outside their relationship with you.
|
||||
|
||||
Conveying under any other circumstances is permitted solely under
|
||||
the conditions stated below. Sublicensing is not allowed; section 10
|
||||
makes it unnecessary.
|
||||
|
||||
3. Protecting Users' Legal Rights From Anti-Circumvention Law.
|
||||
|
||||
No covered work shall be deemed part of an effective technological
|
||||
measure under any applicable law fulfilling obligations under article
|
||||
11 of the WIPO copyright treaty adopted on 20 December 1996, or
|
||||
similar laws prohibiting or restricting circumvention of such
|
||||
measures.
|
||||
|
||||
When you convey a covered work, you waive any legal power to forbid
|
||||
circumvention of technological measures to the extent such circumvention
|
||||
is effected by exercising rights under this License with respect to
|
||||
the covered work, and you disclaim any intention to limit operation or
|
||||
modification of the work as a means of enforcing, against the work's
|
||||
users, your or third parties' legal rights to forbid circumvention of
|
||||
technological measures.
|
||||
|
||||
4. Conveying Verbatim Copies.
|
||||
|
||||
You may convey verbatim copies of the Program's source code as you
|
||||
receive it, in any medium, provided that you conspicuously and
|
||||
appropriately publish on each copy an appropriate copyright notice;
|
||||
keep intact all notices stating that this License and any
|
||||
non-permissive terms added in accord with section 7 apply to the code;
|
||||
keep intact all notices of the absence of any warranty; and give all
|
||||
recipients a copy of this License along with the Program.
|
||||
|
||||
You may charge any price or no price for each copy that you convey,
|
||||
and you may offer support or warranty protection for a fee.
|
||||
|
||||
5. Conveying Modified Source Versions.
|
||||
|
||||
You may convey a work based on the Program, or the modifications to
|
||||
produce it from the Program, in the form of source code under the
|
||||
terms of section 4, provided that you also meet all of these conditions:
|
||||
|
||||
a) The work must carry prominent notices stating that you modified
|
||||
it, and giving a relevant date.
|
||||
|
||||
b) The work must carry prominent notices stating that it is
|
||||
released under this License and any conditions added under section
|
||||
7. This requirement modifies the requirement in section 4 to
|
||||
"keep intact all notices".
|
||||
|
||||
c) You must license the entire work, as a whole, under this
|
||||
License to anyone who comes into possession of a copy. This
|
||||
License will therefore apply, along with any applicable section 7
|
||||
additional terms, to the whole of the work, and all its parts,
|
||||
regardless of how they are packaged. This License gives no
|
||||
permission to license the work in any other way, but it does not
|
||||
invalidate such permission if you have separately received it.
|
||||
|
||||
d) If the work has interactive user interfaces, each must display
|
||||
Appropriate Legal Notices; however, if the Program has interactive
|
||||
interfaces that do not display Appropriate Legal Notices, your
|
||||
work need not make them do so.
|
||||
|
||||
A compilation of a covered work with other separate and independent
|
||||
works, which are not by their nature extensions of the covered work,
|
||||
and which are not combined with it such as to form a larger program,
|
||||
in or on a volume of a storage or distribution medium, is called an
|
||||
"aggregate" if the compilation and its resulting copyright are not
|
||||
used to limit the access or legal rights of the compilation's users
|
||||
beyond what the individual works permit. Inclusion of a covered work
|
||||
in an aggregate does not cause this License to apply to the other
|
||||
parts of the aggregate.
|
||||
|
||||
6. Conveying Non-Source Forms.
|
||||
|
||||
You may convey a covered work in object code form under the terms
|
||||
of sections 4 and 5, provided that you also convey the
|
||||
machine-readable Corresponding Source under the terms of this License,
|
||||
in one of these ways:
|
||||
|
||||
a) Convey the object code in, or embodied in, a physical product
|
||||
(including a physical distribution medium), accompanied by the
|
||||
Corresponding Source fixed on a durable physical medium
|
||||
customarily used for software interchange.
|
||||
|
||||
b) Convey the object code in, or embodied in, a physical product
|
||||
(including a physical distribution medium), accompanied by a
|
||||
written offer, valid for at least three years and valid for as
|
||||
long as you offer spare parts or customer support for that product
|
||||
model, to give anyone who possesses the object code either (1) a
|
||||
copy of the Corresponding Source for all the software in the
|
||||
product that is covered by this License, on a durable physical
|
||||
medium customarily used for software interchange, for a price no
|
||||
more than your reasonable cost of physically performing this
|
||||
conveying of source, or (2) access to copy the
|
||||
Corresponding Source from a network server at no charge.
|
||||
|
||||
c) Convey individual copies of the object code with a copy of the
|
||||
written offer to provide the Corresponding Source. This
|
||||
alternative is allowed only occasionally and noncommercially, and
|
||||
only if you received the object code with such an offer, in accord
|
||||
with subsection 6b.
|
||||
|
||||
d) Convey the object code by offering access from a designated
|
||||
place (gratis or for a charge), and offer equivalent access to the
|
||||
Corresponding Source in the same way through the same place at no
|
||||
further charge. You need not require recipients to copy the
|
||||
Corresponding Source along with the object code. If the place to
|
||||
copy the object code is a network server, the Corresponding Source
|
||||
may be on a different server (operated by you or a third party)
|
||||
that supports equivalent copying facilities, provided you maintain
|
||||
clear directions next to the object code saying where to find the
|
||||
Corresponding Source. Regardless of what server hosts the
|
||||
Corresponding Source, you remain obligated to ensure that it is
|
||||
available for as long as needed to satisfy these requirements.
|
||||
|
||||
e) Convey the object code using peer-to-peer transmission, provided
|
||||
you inform other peers where the object code and Corresponding
|
||||
Source of the work are being offered to the general public at no
|
||||
charge under subsection 6d.
|
||||
|
||||
A separable portion of the object code, whose source code is excluded
|
||||
from the Corresponding Source as a System Library, need not be
|
||||
included in conveying the object code work.
|
||||
|
||||
A "User Product" is either (1) a "consumer product", which means any
|
||||
tangible personal property which is normally used for personal, family,
|
||||
or household purposes, or (2) anything designed or sold for incorporation
|
||||
into a dwelling. In determining whether a product is a consumer product,
|
||||
doubtful cases shall be resolved in favor of coverage. For a particular
|
||||
product received by a particular user, "normally used" refers to a
|
||||
typical or common use of that class of product, regardless of the status
|
||||
of the particular user or of the way in which the particular user
|
||||
actually uses, or expects or is expected to use, the product. A product
|
||||
is a consumer product regardless of whether the product has substantial
|
||||
commercial, industrial or non-consumer uses, unless such uses represent
|
||||
the only significant mode of use of the product.
|
||||
|
||||
"Installation Information" for a User Product means any methods,
|
||||
procedures, authorization keys, or other information required to install
|
||||
and execute modified versions of a covered work in that User Product from
|
||||
a modified version of its Corresponding Source. The information must
|
||||
suffice to ensure that the continued functioning of the modified object
|
||||
code is in no case prevented or interfered with solely because
|
||||
modification has been made.
|
||||
|
||||
If you convey an object code work under this section in, or with, or
|
||||
specifically for use in, a User Product, and the conveying occurs as
|
||||
part of a transaction in which the right of possession and use of the
|
||||
User Product is transferred to the recipient in perpetuity or for a
|
||||
fixed term (regardless of how the transaction is characterized), the
|
||||
Corresponding Source conveyed under this section must be accompanied
|
||||
by the Installation Information. But this requirement does not apply
|
||||
if neither you nor any third party retains the ability to install
|
||||
modified object code on the User Product (for example, the work has
|
||||
been installed in ROM).
|
||||
|
||||
The requirement to provide Installation Information does not include a
|
||||
requirement to continue to provide support service, warranty, or updates
|
||||
for a work that has been modified or installed by the recipient, or for
|
||||
the User Product in which it has been modified or installed. Access to a
|
||||
network may be denied when the modification itself materially and
|
||||
adversely affects the operation of the network or violates the rules and
|
||||
protocols for communication across the network.
|
||||
|
||||
Corresponding Source conveyed, and Installation Information provided,
|
||||
in accord with this section must be in a format that is publicly
|
||||
documented (and with an implementation available to the public in
|
||||
source code form), and must require no special password or key for
|
||||
unpacking, reading or copying.
|
||||
|
||||
7. Additional Terms.
|
||||
|
||||
"Additional permissions" are terms that supplement the terms of this
|
||||
License by making exceptions from one or more of its conditions.
|
||||
Additional permissions that are applicable to the entire Program shall
|
||||
be treated as though they were included in this License, to the extent
|
||||
that they are valid under applicable law. If additional permissions
|
||||
apply only to part of the Program, that part may be used separately
|
||||
under those permissions, but the entire Program remains governed by
|
||||
this License without regard to the additional permissions.
|
||||
|
||||
When you convey a copy of a covered work, you may at your option
|
||||
remove any additional permissions from that copy, or from any part of
|
||||
it. (Additional permissions may be written to require their own
|
||||
removal in certain cases when you modify the work.) You may place
|
||||
additional permissions on material, added by you to a covered work,
|
||||
for which you have or can give appropriate copyright permission.
|
||||
|
||||
Notwithstanding any other provision of this License, for material you
|
||||
add to a covered work, you may (if authorized by the copyright holders of
|
||||
that material) supplement the terms of this License with terms:
|
||||
|
||||
a) Disclaiming warranty or limiting liability differently from the
|
||||
terms of sections 15 and 16 of this License; or
|
||||
|
||||
b) Requiring preservation of specified reasonable legal notices or
|
||||
author attributions in that material or in the Appropriate Legal
|
||||
Notices displayed by works containing it; or
|
||||
|
||||
c) Prohibiting misrepresentation of the origin of that material, or
|
||||
requiring that modified versions of such material be marked in
|
||||
reasonable ways as different from the original version; or
|
||||
|
||||
d) Limiting the use for publicity purposes of names of licensors or
|
||||
authors of the material; or
|
||||
|
||||
e) Declining to grant rights under trademark law for use of some
|
||||
trade names, trademarks, or service marks; or
|
||||
|
||||
f) Requiring indemnification of licensors and authors of that
|
||||
material by anyone who conveys the material (or modified versions of
|
||||
it) with contractual assumptions of liability to the recipient, for
|
||||
any liability that these contractual assumptions directly impose on
|
||||
those licensors and authors.
|
||||
|
||||
All other non-permissive additional terms are considered "further
|
||||
restrictions" within the meaning of section 10. If the Program as you
|
||||
received it, or any part of it, contains a notice stating that it is
|
||||
governed by this License along with a term that is a further
|
||||
restriction, you may remove that term. If a license document contains
|
||||
a further restriction but permits relicensing or conveying under this
|
||||
License, you may add to a covered work material governed by the terms
|
||||
of that license document, provided that the further restriction does
|
||||
not survive such relicensing or conveying.
|
||||
|
||||
If you add terms to a covered work in accord with this section, you
|
||||
must place, in the relevant source files, a statement of the
|
||||
additional terms that apply to those files, or a notice indicating
|
||||
where to find the applicable terms.
|
||||
|
||||
Additional terms, permissive or non-permissive, may be stated in the
|
||||
form of a separately written license, or stated as exceptions;
|
||||
the above requirements apply either way.
|
||||
|
||||
8. Termination.
|
||||
|
||||
You may not propagate or modify a covered work except as expressly
|
||||
provided under this License. Any attempt otherwise to propagate or
|
||||
modify it is void, and will automatically terminate your rights under
|
||||
this License (including any patent licenses granted under the third
|
||||
paragraph of section 11).
|
||||
|
||||
However, if you cease all violation of this License, then your
|
||||
license from a particular copyright holder is reinstated (a)
|
||||
provisionally, unless and until the copyright holder explicitly and
|
||||
finally terminates your license, and (b) permanently, if the copyright
|
||||
holder fails to notify you of the violation by some reasonable means
|
||||
prior to 60 days after the cessation.
|
||||
|
||||
Moreover, your license from a particular copyright holder is
|
||||
reinstated permanently if the copyright holder notifies you of the
|
||||
violation by some reasonable means, this is the first time you have
|
||||
received notice of violation of this License (for any work) from that
|
||||
copyright holder, and you cure the violation prior to 30 days after
|
||||
your receipt of the notice.
|
||||
|
||||
Termination of your rights under this section does not terminate the
|
||||
licenses of parties who have received copies or rights from you under
|
||||
this License. If your rights have been terminated and not permanently
|
||||
reinstated, you do not qualify to receive new licenses for the same
|
||||
material under section 10.
|
||||
|
||||
9. Acceptance Not Required for Having Copies.
|
||||
|
||||
You are not required to accept this License in order to receive or
|
||||
run a copy of the Program. Ancillary propagation of a covered work
|
||||
occurring solely as a consequence of using peer-to-peer transmission
|
||||
to receive a copy likewise does not require acceptance. However,
|
||||
nothing other than this License grants you permission to propagate or
|
||||
modify any covered work. These actions infringe copyright if you do
|
||||
not accept this License. Therefore, by modifying or propagating a
|
||||
covered work, you indicate your acceptance of this License to do so.
|
||||
|
||||
10. Automatic Licensing of Downstream Recipients.
|
||||
|
||||
Each time you convey a covered work, the recipient automatically
|
||||
receives a license from the original licensors, to run, modify and
|
||||
propagate that work, subject to this License. You are not responsible
|
||||
for enforcing compliance by third parties with this License.
|
||||
|
||||
An "entity transaction" is a transaction transferring control of an
|
||||
organization, or substantially all assets of one, or subdividing an
|
||||
organization, or merging organizations. If propagation of a covered
|
||||
work results from an entity transaction, each party to that
|
||||
transaction who receives a copy of the work also receives whatever
|
||||
licenses to the work the party's predecessor in interest had or could
|
||||
give under the previous paragraph, plus a right to possession of the
|
||||
Corresponding Source of the work from the predecessor in interest, if
|
||||
the predecessor has it or can get it with reasonable efforts.
|
||||
|
||||
You may not impose any further restrictions on the exercise of the
|
||||
rights granted or affirmed under this License. For example, you may
|
||||
not impose a license fee, royalty, or other charge for exercise of
|
||||
rights granted under this License, and you may not initiate litigation
|
||||
(including a cross-claim or counterclaim in a lawsuit) alleging that
|
||||
any patent claim is infringed by making, using, selling, offering for
|
||||
sale, or importing the Program or any portion of it.
|
||||
|
||||
11. Patents.
|
||||
|
||||
A "contributor" is a copyright holder who authorizes use under this
|
||||
License of the Program or a work on which the Program is based. The
|
||||
work thus licensed is called the contributor's "contributor version".
|
||||
|
||||
A contributor's "essential patent claims" are all patent claims
|
||||
owned or controlled by the contributor, whether already acquired or
|
||||
hereafter acquired, that would be infringed by some manner, permitted
|
||||
by this License, of making, using, or selling its contributor version,
|
||||
but do not include claims that would be infringed only as a
|
||||
consequence of further modification of the contributor version. For
|
||||
purposes of this definition, "control" includes the right to grant
|
||||
patent sublicenses in a manner consistent with the requirements of
|
||||
this License.
|
||||
|
||||
Each contributor grants you a non-exclusive, worldwide, royalty-free
|
||||
patent license under the contributor's essential patent claims, to
|
||||
make, use, sell, offer for sale, import and otherwise run, modify and
|
||||
propagate the contents of its contributor version.
|
||||
|
||||
In the following three paragraphs, a "patent license" is any express
|
||||
agreement or commitment, however denominated, not to enforce a patent
|
||||
(such as an express permission to practice a patent or covenant not to
|
||||
sue for patent infringement). To "grant" such a patent license to a
|
||||
party means to make such an agreement or commitment not to enforce a
|
||||
patent against the party.
|
||||
|
||||
If you convey a covered work, knowingly relying on a patent license,
|
||||
and the Corresponding Source of the work is not available for anyone
|
||||
to copy, free of charge and under the terms of this License, through a
|
||||
publicly available network server or other readily accessible means,
|
||||
then you must either (1) cause the Corresponding Source to be so
|
||||
available, or (2) arrange to deprive yourself of the benefit of the
|
||||
patent license for this particular work, or (3) arrange, in a manner
|
||||
consistent with the requirements of this License, to extend the patent
|
||||
license to downstream recipients. "Knowingly relying" means you have
|
||||
actual knowledge that, but for the patent license, your conveying the
|
||||
covered work in a country, or your recipient's use of the covered work
|
||||
in a country, would infringe one or more identifiable patents in that
|
||||
country that you have reason to believe are valid.
|
||||
|
||||
If, pursuant to or in connection with a single transaction or
|
||||
arrangement, you convey, or propagate by procuring conveyance of, a
|
||||
covered work, and grant a patent license to some of the parties
|
||||
receiving the covered work authorizing them to use, propagate, modify
|
||||
or convey a specific copy of the covered work, then the patent license
|
||||
you grant is automatically extended to all recipients of the covered
|
||||
work and works based on it.
|
||||
|
||||
A patent license is "discriminatory" if it does not include within
|
||||
the scope of its coverage, prohibits the exercise of, or is
|
||||
conditioned on the non-exercise of one or more of the rights that are
|
||||
specifically granted under this License. You may not convey a covered
|
||||
work if you are a party to an arrangement with a third party that is
|
||||
in the business of distributing software, under which you make payment
|
||||
to the third party based on the extent of your activity of conveying
|
||||
the work, and under which the third party grants, to any of the
|
||||
parties who would receive the covered work from you, a discriminatory
|
||||
patent license (a) in connection with copies of the covered work
|
||||
conveyed by you (or copies made from those copies), or (b) primarily
|
||||
for and in connection with specific products or compilations that
|
||||
contain the covered work, unless you entered into that arrangement,
|
||||
or that patent license was granted, prior to 28 March 2007.
|
||||
|
||||
Nothing in this License shall be construed as excluding or limiting
|
||||
any implied license or other defenses to infringement that may
|
||||
otherwise be available to you under applicable patent law.
|
||||
|
||||
12. No Surrender of Others' Freedom.
|
||||
|
||||
If conditions are imposed on you (whether by court order, agreement or
|
||||
otherwise) that contradict the conditions of this License, they do not
|
||||
excuse you from the conditions of this License. If you cannot convey a
|
||||
covered work so as to satisfy simultaneously your obligations under this
|
||||
License and any other pertinent obligations, then as a consequence you may
|
||||
not convey it at all. For example, if you agree to terms that obligate you
|
||||
to collect a royalty for further conveying from those to whom you convey
|
||||
the Program, the only way you could satisfy both those terms and this
|
||||
License would be to refrain entirely from conveying the Program.
|
||||
|
||||
13. Use with the GNU Affero General Public License.
|
||||
|
||||
Notwithstanding any other provision of this License, you have
|
||||
permission to link or combine any covered work with a work licensed
|
||||
under version 3 of the GNU Affero General Public License into a single
|
||||
combined work, and to convey the resulting work. The terms of this
|
||||
License will continue to apply to the part which is the covered work,
|
||||
but the special requirements of the GNU Affero General Public License,
|
||||
section 13, concerning interaction through a network will apply to the
|
||||
combination as such.
|
||||
|
||||
14. Revised Versions of this License.
|
||||
|
||||
The Free Software Foundation may publish revised and/or new versions of
|
||||
the GNU General Public License from time to time. Such new versions will
|
||||
be similar in spirit to the present version, but may differ in detail to
|
||||
address new problems or concerns.
|
||||
|
||||
Each version is given a distinguishing version number. If the
|
||||
Program specifies that a certain numbered version of the GNU General
|
||||
Public License "or any later version" applies to it, you have the
|
||||
option of following the terms and conditions either of that numbered
|
||||
version or of any later version published by the Free Software
|
||||
Foundation. If the Program does not specify a version number of the
|
||||
GNU General Public License, you may choose any version ever published
|
||||
by the Free Software Foundation.
|
||||
|
||||
If the Program specifies that a proxy can decide which future
|
||||
versions of the GNU General Public License can be used, that proxy's
|
||||
public statement of acceptance of a version permanently authorizes you
|
||||
to choose that version for the Program.
|
||||
|
||||
Later license versions may give you additional or different
|
||||
permissions. However, no additional obligations are imposed on any
|
||||
author or copyright holder as a result of your choosing to follow a
|
||||
later version.
|
||||
|
||||
15. Disclaimer of Warranty.
|
||||
|
||||
THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
|
||||
APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
|
||||
HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
|
||||
OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
|
||||
THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
|
||||
PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
|
||||
IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
|
||||
ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
|
||||
|
||||
16. Limitation of Liability.
|
||||
|
||||
IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
|
||||
WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
|
||||
THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
|
||||
GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
|
||||
USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
|
||||
DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
|
||||
PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
|
||||
EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
|
||||
SUCH DAMAGES.
|
||||
|
||||
17. Interpretation of Sections 15 and 16.
|
||||
|
||||
If the disclaimer of warranty and limitation of liability provided
|
||||
above cannot be given local legal effect according to their terms,
|
||||
reviewing courts shall apply local law that most closely approximates
|
||||
an absolute waiver of all civil liability in connection with the
|
||||
Program, unless a warranty or assumption of liability accompanies a
|
||||
copy of the Program in return for a fee.
|
||||
|
||||
END OF TERMS AND CONDITIONS
|
||||
|
||||
How to Apply These Terms to Your New Programs
|
||||
|
||||
If you develop a new program, and you want it to be of the greatest
|
||||
possible use to the public, the best way to achieve this is to make it
|
||||
free software which everyone can redistribute and change under these terms.
|
||||
|
||||
To do so, attach the following notices to the program. It is safest
|
||||
to attach them to the start of each source file to most effectively
|
||||
state the exclusion of warranty; and each file should have at least
|
||||
the "copyright" line and a pointer to where the full notice is found.
|
||||
|
||||
<one line to give the program's name and a brief idea of what it does.>
|
||||
Copyright (C) <year> <name of author>
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 3 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <https://www.gnu.org/licenses/>.
|
||||
|
||||
Also add information on how to contact you by electronic and paper mail.
|
||||
|
||||
If the program does terminal interaction, make it output a short
|
||||
notice like this when it starts in an interactive mode:
|
||||
|
||||
<program> Copyright (C) <year> <name of author>
|
||||
This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
|
||||
This is free software, and you are welcome to redistribute it
|
||||
under certain conditions; type `show c' for details.
|
||||
|
||||
The hypothetical commands `show w' and `show c' should show the appropriate
|
||||
parts of the General Public License. Of course, your program's commands
|
||||
might be different; for a GUI interface, you would use an "about box".
|
||||
|
||||
You should also get your employer (if you work as a programmer) or school,
|
||||
if any, to sign a "copyright disclaimer" for the program, if necessary.
|
||||
For more information on this, and how to apply and follow the GNU GPL, see
|
||||
<https://www.gnu.org/licenses/>.
|
||||
|
||||
The GNU General Public License does not permit incorporating your program
|
||||
into proprietary programs. If your program is a subroutine library, you
|
||||
may consider it more useful to permit linking proprietary applications with
|
||||
the library. If this is what you want to do, use the GNU Lesser General
|
||||
Public License instead of this License. But first, please read
|
||||
<https://www.gnu.org/licenses/why-not-lgpl.html>.
|
||||
243
extensions-builtin/sd_forge_controlnet/README.md
Normal file
243
extensions-builtin/sd_forge_controlnet/README.md
Normal file
@@ -0,0 +1,243 @@
|
||||
# ControlNet for Stable Diffusion WebUI
|
||||
|
||||
The WebUI extension for ControlNet and other injection-based SD controls.
|
||||
|
||||
|
||||
|
||||
This extension is for AUTOMATIC1111's [Stable Diffusion web UI](https://github.com/AUTOMATIC1111/stable-diffusion-webui), allows the Web UI to add [ControlNet](https://github.com/lllyasviel/ControlNet) to the original Stable Diffusion model to generate images. The addition is on-the-fly, the merging is not required.
|
||||
|
||||
# Installation
|
||||
|
||||
1. Open "Extensions" tab.
|
||||
2. Open "Install from URL" tab in the tab.
|
||||
3. Enter `https://github.com/Mikubill/sd-webui-controlnet.git` to "URL for extension's git repository".
|
||||
4. Press "Install" button.
|
||||
5. Wait for 5 seconds, and you will see the message "Installed into stable-diffusion-webui\extensions\sd-webui-controlnet. Use Installed tab to restart".
|
||||
6. Go to "Installed" tab, click "Check for updates", and then click "Apply and restart UI". (The next time you can also use these buttons to update ControlNet.)
|
||||
7. Completely restart A1111 webui including your terminal. (If you do not know what is a "terminal", you can reboot your computer to achieve the same effect.)
|
||||
8. Download models (see below).
|
||||
9. After you put models in the correct folder, you may need to refresh to see the models. The refresh button is right to your "Model" dropdown.
|
||||
|
||||
# Download Models
|
||||
|
||||
Right now all the 14 models of ControlNet 1.1 are in the beta test.
|
||||
|
||||
Download the models from ControlNet 1.1: https://huggingface.co/lllyasviel/ControlNet-v1-1/tree/main
|
||||
|
||||
You need to download model files ending with ".pth" .
|
||||
|
||||
Put models in your "stable-diffusion-webui\extensions\sd-webui-controlnet\models". You only need to download "pth" files.
|
||||
|
||||
Do not right-click the filenames in HuggingFace website to download. Some users right-clicked those HuggingFace HTML websites and saved those HTML pages as PTH/YAML files. They are not downloading correct files. Instead, please click the small download arrow “↓” icon in HuggingFace to download.
|
||||
|
||||
# Download Models for SDXL
|
||||
|
||||
See instructions [here](https://github.com/Mikubill/sd-webui-controlnet/discussions/2039).
|
||||
|
||||
# Features in ControlNet 1.1
|
||||
|
||||
### Perfect Support for All ControlNet 1.0/1.1 and T2I Adapter Models.
|
||||
|
||||
Now we have perfect support all available models and preprocessors, including perfect support for T2I style adapter and ControlNet 1.1 Shuffle. (Make sure that your YAML file names and model file names are same, see also YAML files in "stable-diffusion-webui\extensions\sd-webui-controlnet\models".)
|
||||
|
||||
### Perfect Support for A1111 High-Res. Fix
|
||||
|
||||
Now if you turn on High-Res Fix in A1111, each controlnet will output two different control images: a small one and a large one. The small one is for your basic generating, and the big one is for your High-Res Fix generating. The two control images are computed by a smart algorithm called "super high-quality control image resampling". This is turned on by default, and you do not need to change any setting.
|
||||
|
||||
### Perfect Support for All A1111 Img2Img or Inpaint Settings and All Mask Types
|
||||
|
||||
Now ControlNet is extensively tested with A1111's different types of masks, including "Inpaint masked"/"Inpaint not masked", and "Whole picture"/"Only masked", and "Only masked padding"&"Mask blur". The resizing perfectly matches A1111's "Just resize"/"Crop and resize"/"Resize and fill". This means you can use ControlNet in nearly everywhere in your A1111 UI without difficulty!
|
||||
|
||||
### The New "Pixel-Perfect" Mode
|
||||
|
||||
Now if you turn on pixel-perfect mode, you do not need to set preprocessor (annotator) resolutions manually. The ControlNet will automatically compute the best annotator resolution for you so that each pixel perfectly matches Stable Diffusion.
|
||||
|
||||
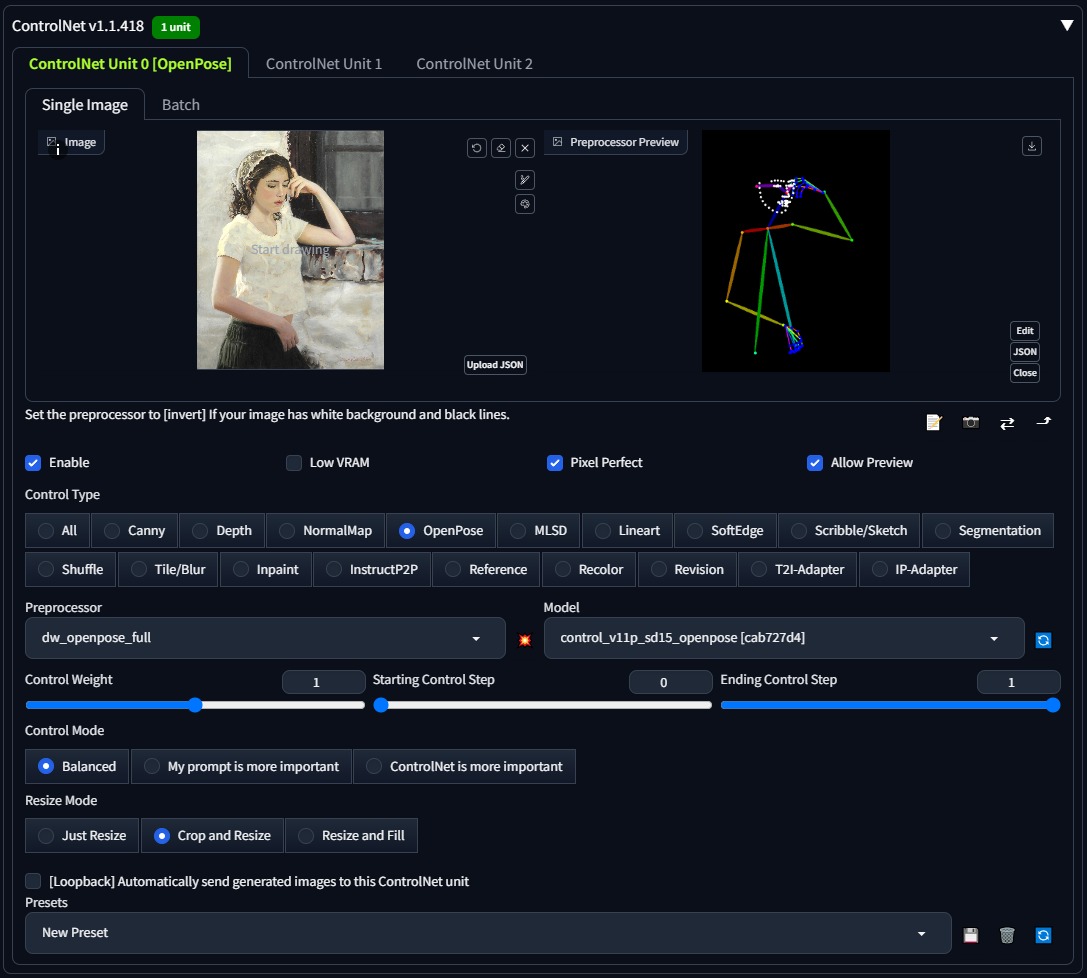
### User-Friendly GUI and Preprocessor Preview
|
||||
|
||||
We reorganized some previously confusing UI like "canvas width/height for new canvas" and it is in the 📝 button now. Now the preview GUI is controlled by the "allow preview" option and the trigger button 💥. The preview image size is better than before, and you do not need to scroll up and down - your a1111 GUI will not be messed up anymore!
|
||||
|
||||
### Support for Almost All Upscaling Scripts
|
||||
|
||||
Now ControlNet 1.1 can support almost all Upscaling/Tile methods. ControlNet 1.1 support the script "Ultimate SD upscale" and almost all other tile-based extensions. Please do not confuse ["Ultimate SD upscale"](https://github.com/Coyote-A/ultimate-upscale-for-automatic1111) with "SD upscale" - they are different scripts. Note that the most recommended upscaling method is ["Tiled VAE/Diffusion"](https://github.com/pkuliyi2015/multidiffusion-upscaler-for-automatic1111) but we test as many methods/extensions as possible. Note that "SD upscale" is supported since 1.1.117, and if you use it, you need to leave all ControlNet images as blank (We do not recommend "SD upscale" since it is somewhat buggy and cannot be maintained - use the "Ultimate SD upscale" instead).
|
||||
|
||||
### More Control Modes (previously called Guess Mode)
|
||||
|
||||
We have fixed many bugs in previous 1.0’s Guess Mode and now it is called Control Mode
|
||||
|
||||

|
||||
|
||||
Now you can control which aspect is more important (your prompt or your ControlNet):
|
||||
|
||||
* "Balanced": ControlNet on both sides of CFG scale, same as turning off "Guess Mode" in ControlNet 1.0
|
||||
|
||||
* "My prompt is more important": ControlNet on both sides of CFG scale, with progressively reduced SD U-Net injections (layer_weight*=0.825**I, where 0<=I <13, and the 13 means ControlNet injected SD 13 times). In this way, you can make sure that your prompts are perfectly displayed in your generated images.
|
||||
|
||||
* "ControlNet is more important": ControlNet only on the Conditional Side of CFG scale (the cond in A1111's batch-cond-uncond). This means the ControlNet will be X times stronger if your cfg-scale is X. For example, if your cfg-scale is 7, then ControlNet is 7 times stronger. Note that here the X times stronger is different from "Control Weights" since your weights are not modified. This "stronger" effect usually has less artifact and give ControlNet more room to guess what is missing from your prompts (and in the previous 1.0, it is called "Guess Mode").
|
||||
|
||||
<table width="100%">
|
||||
<tr>
|
||||
<td width="25%" style="text-align: center">Input (depth+canny+hed)</td>
|
||||
<td width="25%" style="text-align: center">"Balanced"</td>
|
||||
<td width="25%" style="text-align: center">"My prompt is more important"</td>
|
||||
<td width="25%" style="text-align: center">"ControlNet is more important"</td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td width="25%" style="text-align: center"><img src="samples/cm1.png"></td>
|
||||
<td width="25%" style="text-align: center"><img src="samples/cm2.png"></td>
|
||||
<td width="25%" style="text-align: center"><img src="samples/cm3.png"></td>
|
||||
<td width="25%" style="text-align: center"><img src="samples/cm4.png"></td>
|
||||
</tr>
|
||||
</table>
|
||||
|
||||
### Reference-Only Control
|
||||
|
||||
Now we have a `reference-only` preprocessor that does not require any control models. It can guide the diffusion directly using images as references.
|
||||
|
||||
(Prompt "a dog running on grassland, best quality, ...")
|
||||
|
||||

|
||||
|
||||
This method is similar to inpaint-based reference but it does not make your image disordered.
|
||||
|
||||
Many professional A1111 users know a trick to diffuse image with references by inpaint. For example, if you have a 512x512 image of a dog, and want to generate another 512x512 image with the same dog, some users will connect the 512x512 dog image and a 512x512 blank image into a 1024x512 image, send to inpaint, and mask out the blank 512x512 part to diffuse a dog with similar appearance. However, that method is usually not very satisfying since images are connected and many distortions will appear.
|
||||
|
||||
This `reference-only` ControlNet can directly link the attention layers of your SD to any independent images, so that your SD will read arbitrary images for reference. You need at least ControlNet 1.1.153 to use it.
|
||||
|
||||
To use, just select `reference-only` as preprocessor and put an image. Your SD will just use the image as reference.
|
||||
|
||||
*Note that this method is as "non-opinioned" as possible. It only contains very basic connection codes, without any personal preferences, to connect the attention layers with your reference images. However, even if we tried best to not include any opinioned codes, we still need to write some subjective implementations to deal with weighting, cfg-scale, etc - tech report is on the way.*
|
||||
|
||||
More examples [here](https://github.com/Mikubill/sd-webui-controlnet/discussions/1236).
|
||||
|
||||
# Technical Documents
|
||||
|
||||
See also the documents of ControlNet 1.1:
|
||||
|
||||
https://github.com/lllyasviel/ControlNet-v1-1-nightly#model-specification
|
||||
|
||||
# Default Setting
|
||||
|
||||
This is my setting. If you run into any problem, you can use this setting as a sanity check
|
||||
|
||||
|
||||
|
||||
# Use Previous Models
|
||||
|
||||
### Use ControlNet 1.0 Models
|
||||
|
||||
https://huggingface.co/lllyasviel/ControlNet/tree/main/models
|
||||
|
||||
You can still use all previous models in the previous ControlNet 1.0. Now, the previous "depth" is now called "depth_midas", the previous "normal" is called "normal_midas", the previous "hed" is called "softedge_hed". And starting from 1.1, all line maps, edge maps, lineart maps, boundary maps will have black background and white lines.
|
||||
|
||||
### Use T2I-Adapter Models
|
||||
|
||||
(From TencentARC/T2I-Adapter)
|
||||
|
||||
To use T2I-Adapter models:
|
||||
|
||||
1. Download files from https://huggingface.co/TencentARC/T2I-Adapter/tree/main/models
|
||||
2. Put them in "stable-diffusion-webui\extensions\sd-webui-controlnet\models".
|
||||
3. Make sure that the file names of pth files and yaml files are consistent.
|
||||
|
||||
*Note that "CoAdapter" is not implemented yet.*
|
||||
|
||||
# Gallery
|
||||
|
||||
The below results are from ControlNet 1.0.
|
||||
|
||||
| Source | Input | Output |
|
||||
|:-------------------------:|:-------------------------:|:-------------------------:|
|
||||
| (no preprocessor) | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/bal-source.png?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/bal-gen.png?raw=true"> |
|
||||
| (no preprocessor) | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/dog_rel.jpg?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/dog_rel.png?raw=true"> |
|
||||
|<img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/mahiro_input.png?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/mahiro_canny.png?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/mahiro-out.png?raw=true"> |
|
||||
|<img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/evt_source.jpg?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/evt_hed.png?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/evt_gen.png?raw=true"> |
|
||||
|<img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/an-source.jpg?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/an-pose.png?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/an-gen.png?raw=true"> |
|
||||
|<img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/sk-b-src.png?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/sk-b-dep.png?raw=true"> | <img width="256" alt="" src="https://github.com/Mikubill/sd-webui-controlnet/blob/main/samples/sk-b-out.png?raw=true"> |
|
||||
|
||||
The below examples are from T2I-Adapter.
|
||||
|
||||
From `t2iadapter_color_sd14v1.pth` :
|
||||
|
||||
| Source | Input | Output |
|
||||
|:-------------------------:|:-------------------------:|:-------------------------:|
|
||||
| <img width="256" alt="" src="https://user-images.githubusercontent.com/31246794/222947416-ec9e52a4-a1d0-48d8-bb81-736bf636145e.jpeg"> | <img width="256" alt="" src="https://user-images.githubusercontent.com/31246794/222947435-1164e7d8-d857-42f9-ab10-2d4a4b25f33a.png"> | <img width="256" alt="" src="https://user-images.githubusercontent.com/31246794/222947557-5520d5f8-88b4-474d-a576-5c9cd3acac3a.png"> |
|
||||
|
||||
From `t2iadapter_style_sd14v1.pth` :
|
||||
|
||||
| Source | Input | Output |
|
||||
|:-------------------------:|:-------------------------:|:-------------------------:|
|
||||
| <img width="256" alt="" src="https://user-images.githubusercontent.com/31246794/222947416-ec9e52a4-a1d0-48d8-bb81-736bf636145e.jpeg"> | (clip, non-image) | <img width="256" alt="" src="https://user-images.githubusercontent.com/31246794/222965711-7b884c9e-7095-45cb-a91c-e50d296ba3a2.png"> |
|
||||
|
||||
# Minimum Requirements
|
||||
|
||||
* (Windows) (NVIDIA: Ampere) 4gb - with `--xformers` enabled, and `Low VRAM` mode ticked in the UI, goes up to 768x832
|
||||
|
||||
# Multi-ControlNet
|
||||
|
||||
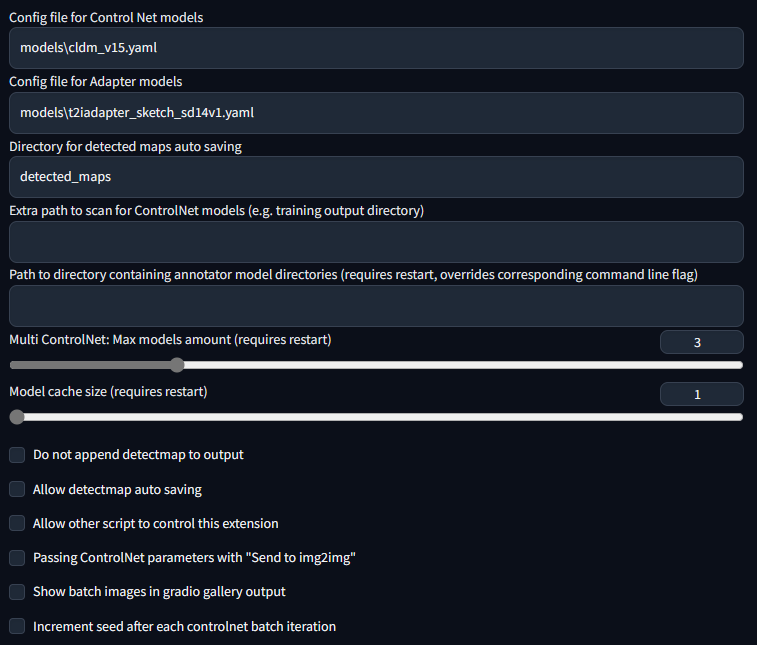
This option allows multiple ControlNet inputs for a single generation. To enable this option, change `Multi ControlNet: Max models amount (requires restart)` in the settings. Note that you will need to restart the WebUI for changes to take effect.
|
||||
|
||||
<table width="100%">
|
||||
<tr>
|
||||
<td width="25%" style="text-align: center">Source A</td>
|
||||
<td width="25%" style="text-align: center">Source B</td>
|
||||
<td width="25%" style="text-align: center">Output</td>
|
||||
</tr>
|
||||
<tr>
|
||||
<td width="25%" style="text-align: center"><img src="https://user-images.githubusercontent.com/31246794/220448620-cd3ede92-8d3f-43d5-b771-32dd8417618f.png"></td>
|
||||
<td width="25%" style="text-align: center"><img src="https://user-images.githubusercontent.com/31246794/220448619-beed9bdb-f6bb-41c2-a7df-aa3ef1f653c5.png"></td>
|
||||
<td width="25%" style="text-align: center"><img src="https://user-images.githubusercontent.com/31246794/220448613-c99a9e04-0450-40fd-bc73-a9122cefaa2c.png"></td>
|
||||
</tr>
|
||||
</table>
|
||||
|
||||
# Control Weight/Start/End
|
||||
|
||||
Weight is the weight of the controlnet "influence". It's analogous to prompt attention/emphasis. E.g. (myprompt: 1.2). Technically, it's the factor by which to multiply the ControlNet outputs before merging them with original SD Unet.
|
||||
|
||||
Guidance Start/End is the percentage of total steps the controlnet applies (guidance strength = guidance end). It's analogous to prompt editing/shifting. E.g. \[myprompt::0.8\] (It applies from the beginning until 80% of total steps)
|
||||
|
||||
# Batch Mode
|
||||
|
||||
Put any unit into batch mode to activate batch mode for all units. Specify a batch directory for each unit, or use the new textbox in the img2img batch tab as a fallback. Although the textbox is located in the img2img batch tab, you can use it to generate images in the txt2img tab as well.
|
||||
|
||||
Note that this feature is only available in the gradio user interface. Call the APIs as many times as you want for custom batch scheduling.
|
||||
|
||||
# API and Script Access
|
||||
|
||||
This extension can accept txt2img or img2img tasks via API or external extension call. Note that you may need to enable `Allow other scripts to control this extension` in settings for external calls.
|
||||
|
||||
To use the API: start WebUI with argument `--api` and go to `http://webui-address/docs` for documents or checkout [examples](https://github.com/Mikubill/sd-webui-controlnet/blob/main/example/txt2img_example/api_txt2img.py).
|
||||
|
||||
To use external call: Checkout [Wiki](https://github.com/Mikubill/sd-webui-controlnet/wiki/API)
|
||||
|
||||
# Command Line Arguments
|
||||
|
||||
This extension adds these command line arguments to the webui:
|
||||
|
||||
```
|
||||
--controlnet-dir <path to directory with controlnet models> ADD a controlnet models directory
|
||||
--controlnet-annotator-models-path <path to directory with annotator model directories> SET the directory for annotator models
|
||||
--no-half-controlnet load controlnet models in full precision
|
||||
--controlnet-preprocessor-cache-size Cache size for controlnet preprocessor results
|
||||
--controlnet-loglevel Log level for the controlnet extension
|
||||
--controlnet-tracemalloc Enable malloc memory tracing
|
||||
```
|
||||
|
||||
# MacOS Support
|
||||
|
||||
Tested with pytorch nightly: https://github.com/Mikubill/sd-webui-controlnet/pull/143#issuecomment-1435058285
|
||||
|
||||
To use this extension with mps and normal pytorch, currently you may need to start WebUI with `--no-half`.
|
||||
|
||||
# Archive of Deprecated Versions
|
||||
|
||||
The previous version (sd-webui-controlnet 1.0) is archived in
|
||||
|
||||
https://github.com/lllyasviel/webui-controlnet-v1-archived
|
||||
|
||||
Using this version is not a temporary stop of updates. You will stop all updates forever.
|
||||
|
||||
Please consider this version if you work with professional studios that requires 100% reproducing of all previous results pixel by pixel.
|
||||
|
||||
# Thanks
|
||||
|
||||
This implementation is inspired by kohya-ss/sd-webui-additional-networks
|
||||
@@ -0,0 +1,21 @@
|
||||
MIT License
|
||||
|
||||
Copyright (c) 2021 Miaomiao Li
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
@@ -0,0 +1,172 @@
|
||||
import os
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
from PIL import Image
|
||||
import fnmatch
|
||||
import cv2
|
||||
|
||||
import sys
|
||||
|
||||
import numpy as np
|
||||
from modules import devices
|
||||
from einops import rearrange
|
||||
from annotator.annotator_path import models_path
|
||||
|
||||
import torchvision
|
||||
from torchvision.models import MobileNet_V2_Weights
|
||||
from torchvision import transforms
|
||||
|
||||
COLOR_BACKGROUND = (255,255,0)
|
||||
COLOR_HAIR = (0,0,255)
|
||||
COLOR_EYE = (255,0,0)
|
||||
COLOR_MOUTH = (255,255,255)
|
||||
COLOR_FACE = (0,255,0)
|
||||
COLOR_SKIN = (0,255,255)
|
||||
COLOR_CLOTHES = (255,0,255)
|
||||
PALETTE = [COLOR_BACKGROUND,COLOR_HAIR,COLOR_EYE,COLOR_MOUTH,COLOR_FACE,COLOR_SKIN,COLOR_CLOTHES]
|
||||
|
||||
class UNet(nn.Module):
|
||||
def __init__(self):
|
||||
super(UNet, self).__init__()
|
||||
self.NUM_SEG_CLASSES = 7 # Background, hair, face, eye, mouth, skin, clothes
|
||||
|
||||
mobilenet_v2 = torchvision.models.mobilenet_v2(weights=MobileNet_V2_Weights.IMAGENET1K_V1)
|
||||
mob_blocks = mobilenet_v2.features
|
||||
|
||||
# Encoder
|
||||
self.en_block0 = nn.Sequential( # in_ch=3 out_ch=16
|
||||
mob_blocks[0],
|
||||
mob_blocks[1]
|
||||
)
|
||||
self.en_block1 = nn.Sequential( # in_ch=16 out_ch=24
|
||||
mob_blocks[2],
|
||||
mob_blocks[3],
|
||||
)
|
||||
self.en_block2 = nn.Sequential( # in_ch=24 out_ch=32
|
||||
mob_blocks[4],
|
||||
mob_blocks[5],
|
||||
mob_blocks[6],
|
||||
)
|
||||
self.en_block3 = nn.Sequential( # in_ch=32 out_ch=96
|
||||
mob_blocks[7],
|
||||
mob_blocks[8],
|
||||
mob_blocks[9],
|
||||
mob_blocks[10],
|
||||
mob_blocks[11],
|
||||
mob_blocks[12],
|
||||
mob_blocks[13],
|
||||
)
|
||||
self.en_block4 = nn.Sequential( # in_ch=96 out_ch=160
|
||||
mob_blocks[14],
|
||||
mob_blocks[15],
|
||||
mob_blocks[16],
|
||||
)
|
||||
|
||||
# Decoder
|
||||
self.de_block4 = nn.Sequential( # in_ch=160 out_ch=96
|
||||
nn.UpsamplingNearest2d(scale_factor=2),
|
||||
nn.Conv2d(160, 96, kernel_size=3, padding=1),
|
||||
nn.InstanceNorm2d(96),
|
||||
nn.LeakyReLU(0.1),
|
||||
nn.Dropout(p=0.2)
|
||||
)
|
||||
self.de_block3 = nn.Sequential( # in_ch=96x2 out_ch=32
|
||||
nn.UpsamplingNearest2d(scale_factor=2),
|
||||
nn.Conv2d(96*2, 32, kernel_size=3, padding=1),
|
||||
nn.InstanceNorm2d(32),
|
||||
nn.LeakyReLU(0.1),
|
||||
nn.Dropout(p=0.2)
|
||||
)
|
||||
self.de_block2 = nn.Sequential( # in_ch=32x2 out_ch=24
|
||||
nn.UpsamplingNearest2d(scale_factor=2),
|
||||
nn.Conv2d(32*2, 24, kernel_size=3, padding=1),
|
||||
nn.InstanceNorm2d(24),
|
||||
nn.LeakyReLU(0.1),
|
||||
nn.Dropout(p=0.2)
|
||||
)
|
||||
self.de_block1 = nn.Sequential( # in_ch=24x2 out_ch=16
|
||||
nn.UpsamplingNearest2d(scale_factor=2),
|
||||
nn.Conv2d(24*2, 16, kernel_size=3, padding=1),
|
||||
nn.InstanceNorm2d(16),
|
||||
nn.LeakyReLU(0.1),
|
||||
nn.Dropout(p=0.2)
|
||||
)
|
||||
|
||||
self.de_block0 = nn.Sequential( # in_ch=16x2 out_ch=7
|
||||
nn.UpsamplingNearest2d(scale_factor=2),
|
||||
nn.Conv2d(16*2, self.NUM_SEG_CLASSES, kernel_size=3, padding=1),
|
||||
nn.Softmax2d()
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
e0 = self.en_block0(x)
|
||||
e1 = self.en_block1(e0)
|
||||
e2 = self.en_block2(e1)
|
||||
e3 = self.en_block3(e2)
|
||||
e4 = self.en_block4(e3)
|
||||
|
||||
d4 = self.de_block4(e4)
|
||||
d4 = F.interpolate(d4, size=e3.size()[2:], mode='bilinear', align_corners=True)
|
||||
c4 = torch.cat((d4,e3),1)
|
||||
|
||||
d3 = self.de_block3(c4)
|
||||
d3 = F.interpolate(d3, size=e2.size()[2:], mode='bilinear', align_corners=True)
|
||||
c3 = torch.cat((d3,e2),1)
|
||||
|
||||
d2 = self.de_block2(c3)
|
||||
d2 = F.interpolate(d2, size=e1.size()[2:], mode='bilinear', align_corners=True)
|
||||
c2 =torch.cat((d2,e1),1)
|
||||
|
||||
d1 = self.de_block1(c2)
|
||||
d1 = F.interpolate(d1, size=e0.size()[2:], mode='bilinear', align_corners=True)
|
||||
c1 = torch.cat((d1,e0),1)
|
||||
y = self.de_block0(c1)
|
||||
|
||||
return y
|
||||
|
||||
|
||||
class AnimeFaceSegment:
|
||||
|
||||
model_dir = os.path.join(models_path, "anime_face_segment")
|
||||
|
||||
def __init__(self):
|
||||
self.model = None
|
||||
self.device = devices.get_device_for("controlnet")
|
||||
|
||||
def load_model(self):
|
||||
remote_model_path = "https://huggingface.co/bdsqlsz/qinglong_controlnet-lllite/resolve/main/Annotators/UNet.pth"
|
||||
modelpath = os.path.join(self.model_dir, "UNet.pth")
|
||||
if not os.path.exists(modelpath):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=self.model_dir)
|
||||
net = UNet()
|
||||
ckpt = torch.load(modelpath, map_location=self.device)
|
||||
for key in list(ckpt.keys()):
|
||||
if 'module.' in key:
|
||||
ckpt[key.replace('module.', '')] = ckpt[key]
|
||||
del ckpt[key]
|
||||
net.load_state_dict(ckpt)
|
||||
net.eval()
|
||||
self.model = net.to(self.device)
|
||||
|
||||
def unload_model(self):
|
||||
if self.model is not None:
|
||||
self.model.cpu()
|
||||
|
||||
def __call__(self, input_image):
|
||||
|
||||
if self.model is None:
|
||||
self.load_model()
|
||||
self.model.to(self.device)
|
||||
transform = transforms.Compose([
|
||||
transforms.Resize(512,interpolation=transforms.InterpolationMode.BICUBIC),
|
||||
transforms.ToTensor(),])
|
||||
img = Image.fromarray(input_image)
|
||||
with torch.no_grad():
|
||||
img = transform(img).unsqueeze(dim=0).to(self.device)
|
||||
seg = self.model(img).squeeze(dim=0)
|
||||
seg = seg.cpu().detach().numpy()
|
||||
img = rearrange(seg,'h w c -> w c h')
|
||||
img = [[PALETTE[np.argmax(val)] for val in buf]for buf in img]
|
||||
return np.array(img).astype(np.uint8)
|
||||
@@ -0,0 +1,22 @@
|
||||
import os
|
||||
from modules import shared
|
||||
|
||||
models_path = shared.opts.data.get('control_net_modules_path', None)
|
||||
if not models_path:
|
||||
models_path = getattr(shared.cmd_opts, 'controlnet_annotator_models_path', None)
|
||||
if not models_path:
|
||||
models_path = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'downloads')
|
||||
|
||||
if not os.path.isabs(models_path):
|
||||
models_path = os.path.join(shared.data_path, models_path)
|
||||
|
||||
clip_vision_path = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'clip_vision')
|
||||
# clip vision is always inside controlnet "extensions\sd-webui-controlnet"
|
||||
# and any problem can be solved by removing controlnet and reinstall
|
||||
|
||||
models_path = os.path.realpath(models_path)
|
||||
os.makedirs(models_path, exist_ok=True)
|
||||
print(f'ControlNet preprocessor location: {models_path}')
|
||||
# Make sure that the default location is inside controlnet "extensions\sd-webui-controlnet"
|
||||
# so that any problem can be solved by removing controlnet and reinstall
|
||||
# if users do not change configs on their own (otherwise users will know what is wrong)
|
||||
@@ -0,0 +1,14 @@
|
||||
import cv2
|
||||
|
||||
|
||||
def apply_binary(img, bin_threshold):
|
||||
img_gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
|
||||
|
||||
if bin_threshold == 0 or bin_threshold == 255:
|
||||
# Otsu's threshold
|
||||
otsu_threshold, img_bin = cv2.threshold(img_gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
|
||||
print("Otsu threshold:", otsu_threshold)
|
||||
else:
|
||||
_, img_bin = cv2.threshold(img_gray, bin_threshold, 255, cv2.THRESH_BINARY_INV)
|
||||
|
||||
return cv2.cvtColor(img_bin, cv2.COLOR_GRAY2RGB)
|
||||
@@ -0,0 +1,5 @@
|
||||
import cv2
|
||||
|
||||
|
||||
def apply_canny(img, low_threshold, high_threshold):
|
||||
return cv2.Canny(img, low_threshold, high_threshold)
|
||||
@@ -0,0 +1,133 @@
|
||||
import os
|
||||
import cv2
|
||||
import torch
|
||||
|
||||
from modules import devices
|
||||
from modules.modelloader import load_file_from_url
|
||||
from annotator.annotator_path import models_path
|
||||
from transformers import CLIPVisionModelWithProjection, CLIPVisionConfig, CLIPImageProcessor
|
||||
|
||||
|
||||
config_clip_g = {
|
||||
"attention_dropout": 0.0,
|
||||
"dropout": 0.0,
|
||||
"hidden_act": "gelu",
|
||||
"hidden_size": 1664,
|
||||
"image_size": 224,
|
||||
"initializer_factor": 1.0,
|
||||
"initializer_range": 0.02,
|
||||
"intermediate_size": 8192,
|
||||
"layer_norm_eps": 1e-05,
|
||||
"model_type": "clip_vision_model",
|
||||
"num_attention_heads": 16,
|
||||
"num_channels": 3,
|
||||
"num_hidden_layers": 48,
|
||||
"patch_size": 14,
|
||||
"projection_dim": 1280,
|
||||
"torch_dtype": "float32"
|
||||
}
|
||||
|
||||
config_clip_h = {
|
||||
"attention_dropout": 0.0,
|
||||
"dropout": 0.0,
|
||||
"hidden_act": "gelu",
|
||||
"hidden_size": 1280,
|
||||
"image_size": 224,
|
||||
"initializer_factor": 1.0,
|
||||
"initializer_range": 0.02,
|
||||
"intermediate_size": 5120,
|
||||
"layer_norm_eps": 1e-05,
|
||||
"model_type": "clip_vision_model",
|
||||
"num_attention_heads": 16,
|
||||
"num_channels": 3,
|
||||
"num_hidden_layers": 32,
|
||||
"patch_size": 14,
|
||||
"projection_dim": 1024,
|
||||
"torch_dtype": "float32"
|
||||
}
|
||||
|
||||
config_clip_vitl = {
|
||||
"attention_dropout": 0.0,
|
||||
"dropout": 0.0,
|
||||
"hidden_act": "quick_gelu",
|
||||
"hidden_size": 1024,
|
||||
"image_size": 224,
|
||||
"initializer_factor": 1.0,
|
||||
"initializer_range": 0.02,
|
||||
"intermediate_size": 4096,
|
||||
"layer_norm_eps": 1e-05,
|
||||
"model_type": "clip_vision_model",
|
||||
"num_attention_heads": 16,
|
||||
"num_channels": 3,
|
||||
"num_hidden_layers": 24,
|
||||
"patch_size": 14,
|
||||
"projection_dim": 768,
|
||||
"torch_dtype": "float32"
|
||||
}
|
||||
|
||||
configs = {
|
||||
'clip_g': config_clip_g,
|
||||
'clip_h': config_clip_h,
|
||||
'clip_vitl': config_clip_vitl,
|
||||
}
|
||||
|
||||
downloads = {
|
||||
'clip_vitl': 'https://huggingface.co/openai/clip-vit-large-patch14/resolve/main/pytorch_model.bin',
|
||||
'clip_g': 'https://huggingface.co/lllyasviel/Annotators/resolve/main/clip_g.pth',
|
||||
'clip_h': 'https://huggingface.co/h94/IP-Adapter/resolve/main/models/image_encoder/pytorch_model.bin'
|
||||
}
|
||||
|
||||
|
||||
clip_vision_h_uc = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'clip_vision_h_uc.data')
|
||||
clip_vision_h_uc = torch.load(clip_vision_h_uc, map_location=torch.device('cuda' if torch.cuda.is_available() else 'cpu'))['uc']
|
||||
|
||||
clip_vision_vith_uc = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'clip_vision_vith_uc.data')
|
||||
clip_vision_vith_uc = torch.load(clip_vision_vith_uc, map_location=torch.device('cuda' if torch.cuda.is_available() else 'cpu'))['uc']
|
||||
|
||||
|
||||
class ClipVisionDetector:
|
||||
def __init__(self, config, low_vram: bool):
|
||||
assert config in downloads
|
||||
self.download_link = downloads[config]
|
||||
self.model_path = os.path.join(models_path, 'clip_vision')
|
||||
self.file_name = config + '.pth'
|
||||
self.config = configs[config]
|
||||
self.device = (
|
||||
torch.device("cpu") if low_vram else
|
||||
devices.get_device_for("controlnet")
|
||||
)
|
||||
os.makedirs(self.model_path, exist_ok=True)
|
||||
file_path = os.path.join(self.model_path, self.file_name)
|
||||
if not os.path.exists(file_path):
|
||||
load_file_from_url(url=self.download_link, model_dir=self.model_path, file_name=self.file_name)
|
||||
config = CLIPVisionConfig(**self.config)
|
||||
|
||||
self.model = CLIPVisionModelWithProjection(config)
|
||||
self.processor = CLIPImageProcessor(crop_size=224,
|
||||
do_center_crop=True,
|
||||
do_convert_rgb=True,
|
||||
do_normalize=True,
|
||||
do_resize=True,
|
||||
image_mean=[0.48145466, 0.4578275, 0.40821073],
|
||||
image_std=[0.26862954, 0.26130258, 0.27577711],
|
||||
resample=3,
|
||||
size=224)
|
||||
sd = torch.load(file_path, map_location=self.device)
|
||||
self.model.load_state_dict(sd, strict=False)
|
||||
del sd
|
||||
self.model.to(self.device)
|
||||
self.model.eval()
|
||||
|
||||
def unload_model(self):
|
||||
if self.model is not None:
|
||||
self.model.to('meta')
|
||||
|
||||
def __call__(self, input_image):
|
||||
with torch.no_grad():
|
||||
input_image = cv2.resize(input_image, (224, 224), interpolation=cv2.INTER_AREA)
|
||||
feat = self.processor(images=input_image, return_tensors="pt")
|
||||
feat['pixel_values'] = feat['pixel_values'].to(self.device)
|
||||
result = self.model(**feat, output_hidden_states=True)
|
||||
result['hidden_states'] = [v.to(self.device) for v in result['hidden_states']]
|
||||
result = {k: v.to(self.device) if isinstance(v, torch.Tensor) else v for k, v in result.items()}
|
||||
return result
|
||||
Binary file not shown.
Binary file not shown.
@@ -0,0 +1,20 @@
|
||||
import cv2
|
||||
|
||||
def cv2_resize_shortest_edge(image, size):
|
||||
h, w = image.shape[:2]
|
||||
if h < w:
|
||||
new_h = size
|
||||
new_w = int(round(w / h * size))
|
||||
else:
|
||||
new_w = size
|
||||
new_h = int(round(h / w * size))
|
||||
resized_image = cv2.resize(image, (new_w, new_h), interpolation=cv2.INTER_AREA)
|
||||
return resized_image
|
||||
|
||||
def apply_color(img, res=512):
|
||||
img = cv2_resize_shortest_edge(img, res)
|
||||
h, w = img.shape[:2]
|
||||
|
||||
input_img_color = cv2.resize(img, (w//64, h//64), interpolation=cv2.INTER_CUBIC)
|
||||
input_img_color = cv2.resize(input_img_color, (w, h), interpolation=cv2.INTER_NEAREST)
|
||||
return input_img_color
|
||||
@@ -0,0 +1,57 @@
|
||||
import torchvision # Fix issue Unknown builtin op: torchvision::nms
|
||||
import cv2
|
||||
import numpy as np
|
||||
import torch
|
||||
from einops import rearrange
|
||||
from .densepose import DensePoseMaskedColormapResultsVisualizer, _extract_i_from_iuvarr, densepose_chart_predictor_output_to_result_with_confidences
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
import os
|
||||
|
||||
N_PART_LABELS = 24
|
||||
result_visualizer = DensePoseMaskedColormapResultsVisualizer(
|
||||
alpha=1,
|
||||
data_extractor=_extract_i_from_iuvarr,
|
||||
segm_extractor=_extract_i_from_iuvarr,
|
||||
val_scale = 255.0 / N_PART_LABELS
|
||||
)
|
||||
remote_torchscript_path = "https://huggingface.co/LayerNorm/DensePose-TorchScript-with-hint-image/resolve/main/densepose_r50_fpn_dl.torchscript"
|
||||
torchscript_model = None
|
||||
model_dir = os.path.join(models_path, "densepose")
|
||||
|
||||
def apply_densepose(input_image, cmap="viridis"):
|
||||
global torchscript_model
|
||||
if torchscript_model is None:
|
||||
model_path = os.path.join(model_dir, "densepose_r50_fpn_dl.torchscript")
|
||||
if not os.path.exists(model_path):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_torchscript_path, model_dir=model_dir)
|
||||
torchscript_model = torch.jit.load(model_path, map_location="cpu").to(devices.get_device_for("controlnet")).eval()
|
||||
H, W = input_image.shape[:2]
|
||||
|
||||
hint_image_canvas = np.zeros([H, W], dtype=np.uint8)
|
||||
hint_image_canvas = np.tile(hint_image_canvas[:, :, np.newaxis], [1, 1, 3])
|
||||
input_image = rearrange(torch.from_numpy(input_image).to(devices.get_device_for("controlnet")), 'h w c -> c h w')
|
||||
pred_boxes, corase_segm, fine_segm, u, v = torchscript_model(input_image)
|
||||
|
||||
extractor = densepose_chart_predictor_output_to_result_with_confidences
|
||||
densepose_results = [extractor(pred_boxes[i:i+1], corase_segm[i:i+1], fine_segm[i:i+1], u[i:i+1], v[i:i+1]) for i in range(len(pred_boxes))]
|
||||
|
||||
if cmap=="viridis":
|
||||
result_visualizer.mask_visualizer.cmap = cv2.COLORMAP_VIRIDIS
|
||||
hint_image = result_visualizer.visualize(hint_image_canvas, densepose_results)
|
||||
hint_image = cv2.cvtColor(hint_image, cv2.COLOR_BGR2RGB)
|
||||
hint_image[:, :, 0][hint_image[:, :, 0] == 0] = 68
|
||||
hint_image[:, :, 1][hint_image[:, :, 1] == 0] = 1
|
||||
hint_image[:, :, 2][hint_image[:, :, 2] == 0] = 84
|
||||
else:
|
||||
result_visualizer.mask_visualizer.cmap = cv2.COLORMAP_PARULA
|
||||
hint_image = result_visualizer.visualize(hint_image_canvas, densepose_results)
|
||||
hint_image = cv2.cvtColor(hint_image, cv2.COLOR_BGR2RGB)
|
||||
|
||||
return hint_image
|
||||
|
||||
def unload_model():
|
||||
global torchscript_model
|
||||
if torchscript_model is not None:
|
||||
torchscript_model.cpu()
|
||||
@@ -0,0 +1,347 @@
|
||||
from typing import Tuple
|
||||
import math
|
||||
import numpy as np
|
||||
from enum import IntEnum
|
||||
from typing import List, Tuple, Union
|
||||
import torch
|
||||
from torch.nn import functional as F
|
||||
import logging
|
||||
import cv2
|
||||
|
||||
Image = np.ndarray
|
||||
Boxes = torch.Tensor
|
||||
ImageSizeType = Tuple[int, int]
|
||||
_RawBoxType = Union[List[float], Tuple[float, ...], torch.Tensor, np.ndarray]
|
||||
IntTupleBox = Tuple[int, int, int, int]
|
||||
|
||||
class BoxMode(IntEnum):
|
||||
"""
|
||||
Enum of different ways to represent a box.
|
||||
"""
|
||||
|
||||
XYXY_ABS = 0
|
||||
"""
|
||||
(x0, y0, x1, y1) in absolute floating points coordinates.
|
||||
The coordinates in range [0, width or height].
|
||||
"""
|
||||
XYWH_ABS = 1
|
||||
"""
|
||||
(x0, y0, w, h) in absolute floating points coordinates.
|
||||
"""
|
||||
XYXY_REL = 2
|
||||
"""
|
||||
Not yet supported!
|
||||
(x0, y0, x1, y1) in range [0, 1]. They are relative to the size of the image.
|
||||
"""
|
||||
XYWH_REL = 3
|
||||
"""
|
||||
Not yet supported!
|
||||
(x0, y0, w, h) in range [0, 1]. They are relative to the size of the image.
|
||||
"""
|
||||
XYWHA_ABS = 4
|
||||
"""
|
||||
(xc, yc, w, h, a) in absolute floating points coordinates.
|
||||
(xc, yc) is the center of the rotated box, and the angle a is in degrees ccw.
|
||||
"""
|
||||
|
||||
@staticmethod
|
||||
def convert(box: _RawBoxType, from_mode: "BoxMode", to_mode: "BoxMode") -> _RawBoxType:
|
||||
"""
|
||||
Args:
|
||||
box: can be a k-tuple, k-list or an Nxk array/tensor, where k = 4 or 5
|
||||
from_mode, to_mode (BoxMode)
|
||||
|
||||
Returns:
|
||||
The converted box of the same type.
|
||||
"""
|
||||
if from_mode == to_mode:
|
||||
return box
|
||||
|
||||
original_type = type(box)
|
||||
is_numpy = isinstance(box, np.ndarray)
|
||||
single_box = isinstance(box, (list, tuple))
|
||||
if single_box:
|
||||
assert len(box) == 4 or len(box) == 5, (
|
||||
"BoxMode.convert takes either a k-tuple/list or an Nxk array/tensor,"
|
||||
" where k == 4 or 5"
|
||||
)
|
||||
arr = torch.tensor(box)[None, :]
|
||||
else:
|
||||
# avoid modifying the input box
|
||||
if is_numpy:
|
||||
arr = torch.from_numpy(np.asarray(box)).clone()
|
||||
else:
|
||||
arr = box.clone()
|
||||
|
||||
assert to_mode not in [BoxMode.XYXY_REL, BoxMode.XYWH_REL] and from_mode not in [
|
||||
BoxMode.XYXY_REL,
|
||||
BoxMode.XYWH_REL,
|
||||
], "Relative mode not yet supported!"
|
||||
|
||||
if from_mode == BoxMode.XYWHA_ABS and to_mode == BoxMode.XYXY_ABS:
|
||||
assert (
|
||||
arr.shape[-1] == 5
|
||||
), "The last dimension of input shape must be 5 for XYWHA format"
|
||||
original_dtype = arr.dtype
|
||||
arr = arr.double()
|
||||
|
||||
w = arr[:, 2]
|
||||
h = arr[:, 3]
|
||||
a = arr[:, 4]
|
||||
c = torch.abs(torch.cos(a * math.pi / 180.0))
|
||||
s = torch.abs(torch.sin(a * math.pi / 180.0))
|
||||
# This basically computes the horizontal bounding rectangle of the rotated box
|
||||
new_w = c * w + s * h
|
||||
new_h = c * h + s * w
|
||||
|
||||
# convert center to top-left corner
|
||||
arr[:, 0] -= new_w / 2.0
|
||||
arr[:, 1] -= new_h / 2.0
|
||||
# bottom-right corner
|
||||
arr[:, 2] = arr[:, 0] + new_w
|
||||
arr[:, 3] = arr[:, 1] + new_h
|
||||
|
||||
arr = arr[:, :4].to(dtype=original_dtype)
|
||||
elif from_mode == BoxMode.XYWH_ABS and to_mode == BoxMode.XYWHA_ABS:
|
||||
original_dtype = arr.dtype
|
||||
arr = arr.double()
|
||||
arr[:, 0] += arr[:, 2] / 2.0
|
||||
arr[:, 1] += arr[:, 3] / 2.0
|
||||
angles = torch.zeros((arr.shape[0], 1), dtype=arr.dtype)
|
||||
arr = torch.cat((arr, angles), axis=1).to(dtype=original_dtype)
|
||||
else:
|
||||
if to_mode == BoxMode.XYXY_ABS and from_mode == BoxMode.XYWH_ABS:
|
||||
arr[:, 2] += arr[:, 0]
|
||||
arr[:, 3] += arr[:, 1]
|
||||
elif from_mode == BoxMode.XYXY_ABS and to_mode == BoxMode.XYWH_ABS:
|
||||
arr[:, 2] -= arr[:, 0]
|
||||
arr[:, 3] -= arr[:, 1]
|
||||
else:
|
||||
raise NotImplementedError(
|
||||
"Conversion from BoxMode {} to {} is not supported yet".format(
|
||||
from_mode, to_mode
|
||||
)
|
||||
)
|
||||
|
||||
if single_box:
|
||||
return original_type(arr.flatten().tolist())
|
||||
if is_numpy:
|
||||
return arr.numpy()
|
||||
else:
|
||||
return arr
|
||||
|
||||
class MatrixVisualizer:
|
||||
"""
|
||||
Base visualizer for matrix data
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
inplace=True,
|
||||
cmap=cv2.COLORMAP_PARULA,
|
||||
val_scale=1.0,
|
||||
alpha=0.7,
|
||||
interp_method_matrix=cv2.INTER_LINEAR,
|
||||
interp_method_mask=cv2.INTER_NEAREST,
|
||||
):
|
||||
self.inplace = inplace
|
||||
self.cmap = cmap
|
||||
self.val_scale = val_scale
|
||||
self.alpha = alpha
|
||||
self.interp_method_matrix = interp_method_matrix
|
||||
self.interp_method_mask = interp_method_mask
|
||||
|
||||
def visualize(self, image_bgr, mask, matrix, bbox_xywh):
|
||||
self._check_image(image_bgr)
|
||||
self._check_mask_matrix(mask, matrix)
|
||||
if self.inplace:
|
||||
image_target_bgr = image_bgr
|
||||
else:
|
||||
image_target_bgr = image_bgr * 0
|
||||
x, y, w, h = [int(v) for v in bbox_xywh]
|
||||
if w <= 0 or h <= 0:
|
||||
return image_bgr
|
||||
mask, matrix = self._resize(mask, matrix, w, h)
|
||||
mask_bg = np.tile((mask == 0)[:, :, np.newaxis], [1, 1, 3])
|
||||
matrix_scaled = matrix.astype(np.float32) * self.val_scale
|
||||
_EPSILON = 1e-6
|
||||
if np.any(matrix_scaled > 255 + _EPSILON):
|
||||
logger = logging.getLogger(__name__)
|
||||
logger.warning(
|
||||
f"Matrix has values > {255 + _EPSILON} after " f"scaling, clipping to [0..255]"
|
||||
)
|
||||
matrix_scaled_8u = matrix_scaled.clip(0, 255).astype(np.uint8)
|
||||
matrix_vis = cv2.applyColorMap(matrix_scaled_8u, self.cmap)
|
||||
matrix_vis[mask_bg] = image_target_bgr[y : y + h, x : x + w, :][mask_bg]
|
||||
image_target_bgr[y : y + h, x : x + w, :] = (
|
||||
image_target_bgr[y : y + h, x : x + w, :] * (1.0 - self.alpha) + matrix_vis * self.alpha
|
||||
)
|
||||
return image_target_bgr.astype(np.uint8)
|
||||
|
||||
def _resize(self, mask, matrix, w, h):
|
||||
if (w != mask.shape[1]) or (h != mask.shape[0]):
|
||||
mask = cv2.resize(mask, (w, h), self.interp_method_mask)
|
||||
if (w != matrix.shape[1]) or (h != matrix.shape[0]):
|
||||
matrix = cv2.resize(matrix, (w, h), self.interp_method_matrix)
|
||||
return mask, matrix
|
||||
|
||||
def _check_image(self, image_rgb):
|
||||
assert len(image_rgb.shape) == 3
|
||||
assert image_rgb.shape[2] == 3
|
||||
assert image_rgb.dtype == np.uint8
|
||||
|
||||
def _check_mask_matrix(self, mask, matrix):
|
||||
assert len(matrix.shape) == 2
|
||||
assert len(mask.shape) == 2
|
||||
assert mask.dtype == np.uint8
|
||||
|
||||
class DensePoseResultsVisualizer:
|
||||
def visualize(
|
||||
self,
|
||||
image_bgr: Image,
|
||||
results,
|
||||
) -> Image:
|
||||
context = self.create_visualization_context(image_bgr)
|
||||
for i, result in enumerate(results):
|
||||
boxes_xywh, labels, uv = result
|
||||
iuv_array = torch.cat(
|
||||
(labels[None].type(torch.float32), uv * 255.0)
|
||||
).type(torch.uint8)
|
||||
self.visualize_iuv_arr(context, iuv_array.cpu().numpy(), boxes_xywh)
|
||||
image_bgr = self.context_to_image_bgr(context)
|
||||
return image_bgr
|
||||
|
||||
def create_visualization_context(self, image_bgr: Image):
|
||||
return image_bgr
|
||||
|
||||
def visualize_iuv_arr(self, context, iuv_arr: np.ndarray, bbox_xywh) -> None:
|
||||
pass
|
||||
|
||||
def context_to_image_bgr(self, context):
|
||||
return context
|
||||
|
||||
def get_image_bgr_from_context(self, context):
|
||||
return context
|
||||
|
||||
class DensePoseMaskedColormapResultsVisualizer(DensePoseResultsVisualizer):
|
||||
def __init__(
|
||||
self,
|
||||
data_extractor,
|
||||
segm_extractor,
|
||||
inplace=True,
|
||||
cmap=cv2.COLORMAP_PARULA,
|
||||
alpha=0.7,
|
||||
val_scale=1.0,
|
||||
**kwargs,
|
||||
):
|
||||
self.mask_visualizer = MatrixVisualizer(
|
||||
inplace=inplace, cmap=cmap, val_scale=val_scale, alpha=alpha
|
||||
)
|
||||
self.data_extractor = data_extractor
|
||||
self.segm_extractor = segm_extractor
|
||||
|
||||
def context_to_image_bgr(self, context):
|
||||
return context
|
||||
|
||||
def visualize_iuv_arr(self, context, iuv_arr: np.ndarray, bbox_xywh) -> None:
|
||||
image_bgr = self.get_image_bgr_from_context(context)
|
||||
matrix = self.data_extractor(iuv_arr)
|
||||
segm = self.segm_extractor(iuv_arr)
|
||||
mask = np.zeros(matrix.shape, dtype=np.uint8)
|
||||
mask[segm > 0] = 1
|
||||
image_bgr = self.mask_visualizer.visualize(image_bgr, mask, matrix, bbox_xywh)
|
||||
|
||||
|
||||
def _extract_i_from_iuvarr(iuv_arr):
|
||||
return iuv_arr[0, :, :]
|
||||
|
||||
|
||||
def _extract_u_from_iuvarr(iuv_arr):
|
||||
return iuv_arr[1, :, :]
|
||||
|
||||
|
||||
def _extract_v_from_iuvarr(iuv_arr):
|
||||
return iuv_arr[2, :, :]
|
||||
|
||||
def make_int_box(box: torch.Tensor) -> IntTupleBox:
|
||||
int_box = [0, 0, 0, 0]
|
||||
int_box[0], int_box[1], int_box[2], int_box[3] = tuple(box.long().tolist())
|
||||
return int_box[0], int_box[1], int_box[2], int_box[3]
|
||||
|
||||
def densepose_chart_predictor_output_to_result_with_confidences(
|
||||
boxes: Boxes,
|
||||
coarse_segm,
|
||||
fine_segm,
|
||||
u, v
|
||||
|
||||
):
|
||||
boxes_xyxy_abs = boxes.clone()
|
||||
boxes_xywh_abs = BoxMode.convert(boxes_xyxy_abs, BoxMode.XYXY_ABS, BoxMode.XYWH_ABS)
|
||||
box_xywh = make_int_box(boxes_xywh_abs[0])
|
||||
|
||||
labels = resample_fine_and_coarse_segm_tensors_to_bbox(fine_segm, coarse_segm, box_xywh).squeeze(0)
|
||||
uv = resample_uv_tensors_to_bbox(u, v, labels, box_xywh)
|
||||
confidences = []
|
||||
return box_xywh, labels, uv
|
||||
|
||||
def resample_fine_and_coarse_segm_tensors_to_bbox(
|
||||
fine_segm: torch.Tensor, coarse_segm: torch.Tensor, box_xywh_abs: IntTupleBox
|
||||
):
|
||||
"""
|
||||
Resample fine and coarse segmentation tensors to the given
|
||||
bounding box and derive labels for each pixel of the bounding box
|
||||
|
||||
Args:
|
||||
fine_segm: float tensor of shape [1, C, Hout, Wout]
|
||||
coarse_segm: float tensor of shape [1, K, Hout, Wout]
|
||||
box_xywh_abs (tuple of 4 int): bounding box given by its upper-left
|
||||
corner coordinates, width (W) and height (H)
|
||||
Return:
|
||||
Labels for each pixel of the bounding box, a long tensor of size [1, H, W]
|
||||
"""
|
||||
x, y, w, h = box_xywh_abs
|
||||
w = max(int(w), 1)
|
||||
h = max(int(h), 1)
|
||||
# coarse segmentation
|
||||
coarse_segm_bbox = F.interpolate(
|
||||
coarse_segm,
|
||||
(h, w),
|
||||
mode="bilinear",
|
||||
align_corners=False,
|
||||
).argmax(dim=1)
|
||||
# combined coarse and fine segmentation
|
||||
labels = (
|
||||
F.interpolate(fine_segm, (h, w), mode="bilinear", align_corners=False).argmax(dim=1)
|
||||
* (coarse_segm_bbox > 0).long()
|
||||
)
|
||||
return labels
|
||||
|
||||
def resample_uv_tensors_to_bbox(
|
||||
u: torch.Tensor,
|
||||
v: torch.Tensor,
|
||||
labels: torch.Tensor,
|
||||
box_xywh_abs: IntTupleBox,
|
||||
) -> torch.Tensor:
|
||||
"""
|
||||
Resamples U and V coordinate estimates for the given bounding box
|
||||
|
||||
Args:
|
||||
u (tensor [1, C, H, W] of float): U coordinates
|
||||
v (tensor [1, C, H, W] of float): V coordinates
|
||||
labels (tensor [H, W] of long): labels obtained by resampling segmentation
|
||||
outputs for the given bounding box
|
||||
box_xywh_abs (tuple of 4 int): bounding box that corresponds to predictor outputs
|
||||
Return:
|
||||
Resampled U and V coordinates - a tensor [2, H, W] of float
|
||||
"""
|
||||
x, y, w, h = box_xywh_abs
|
||||
w = max(int(w), 1)
|
||||
h = max(int(h), 1)
|
||||
u_bbox = F.interpolate(u, (h, w), mode="bilinear", align_corners=False)
|
||||
v_bbox = F.interpolate(v, (h, w), mode="bilinear", align_corners=False)
|
||||
uv = torch.zeros([2, h, w], dtype=torch.float32, device=u.device)
|
||||
for part_id in range(1, u_bbox.size(1)):
|
||||
uv[0][labels == part_id] = u_bbox[0, part_id][labels == part_id]
|
||||
uv[1][labels == part_id] = v_bbox[0, part_id][labels == part_id]
|
||||
return uv
|
||||
|
||||
@@ -0,0 +1,79 @@
|
||||
import os
|
||||
import torch
|
||||
import cv2
|
||||
import numpy as np
|
||||
import torch.nn.functional as F
|
||||
from torchvision.transforms import Compose
|
||||
|
||||
from depth_anything.dpt import DPT_DINOv2
|
||||
from depth_anything.util.transform import Resize, NormalizeImage, PrepareForNet
|
||||
from .util import load_model
|
||||
from .annotator_path import models_path
|
||||
|
||||
|
||||
transform = Compose(
|
||||
[
|
||||
Resize(
|
||||
width=518,
|
||||
height=518,
|
||||
resize_target=False,
|
||||
keep_aspect_ratio=True,
|
||||
ensure_multiple_of=14,
|
||||
resize_method="lower_bound",
|
||||
image_interpolation_method=cv2.INTER_CUBIC,
|
||||
),
|
||||
NormalizeImage(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
|
||||
PrepareForNet(),
|
||||
]
|
||||
)
|
||||
|
||||
|
||||
class DepthAnythingDetector:
|
||||
"""https://github.com/LiheYoung/Depth-Anything"""
|
||||
|
||||
model_dir = os.path.join(models_path, "depth_anything")
|
||||
|
||||
def __init__(self, device: torch.device):
|
||||
self.device = device
|
||||
self.model = (
|
||||
DPT_DINOv2(
|
||||
encoder="vitl",
|
||||
features=256,
|
||||
out_channels=[256, 512, 1024, 1024],
|
||||
localhub=False,
|
||||
)
|
||||
.to(device)
|
||||
.eval()
|
||||
)
|
||||
remote_url = os.environ.get(
|
||||
"CONTROLNET_DEPTH_ANYTHING_MODEL_URL",
|
||||
"https://huggingface.co/spaces/LiheYoung/Depth-Anything/resolve/main/checkpoints/depth_anything_vitl14.pth",
|
||||
)
|
||||
model_path = load_model(
|
||||
"depth_anything_vitl14.pth", remote_url=remote_url, model_dir=self.model_dir
|
||||
)
|
||||
self.model.load_state_dict(torch.load(model_path))
|
||||
|
||||
def __call__(self, image: np.ndarray, colored: bool = True) -> np.ndarray:
|
||||
self.model.to(self.device)
|
||||
h, w = image.shape[:2]
|
||||
|
||||
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) / 255.0
|
||||
image = transform({"image": image})["image"]
|
||||
image = torch.from_numpy(image).unsqueeze(0).to(self.device)
|
||||
@torch.no_grad()
|
||||
def predict_depth(model, image):
|
||||
return model(image)
|
||||
depth = predict_depth(self.model, image)
|
||||
depth = F.interpolate(
|
||||
depth[None], (h, w), mode="bilinear", align_corners=False
|
||||
)[0, 0]
|
||||
depth = (depth - depth.min()) / (depth.max() - depth.min()) * 255.0
|
||||
depth = depth.cpu().numpy().astype(np.uint8)
|
||||
if colored:
|
||||
return cv2.applyColorMap(depth, cv2.COLORMAP_INFERNO)[:, :, ::-1]
|
||||
else:
|
||||
return depth
|
||||
|
||||
def unload_model(self):
|
||||
self.model.to("cpu")
|
||||
@@ -0,0 +1,98 @@
|
||||
# This is an improved version and model of HED edge detection with Apache License, Version 2.0.
|
||||
# Please use this implementation in your products
|
||||
# This implementation may produce slightly different results from Saining Xie's official implementations,
|
||||
# but it generates smoother edges and is more suitable for ControlNet as well as other image-to-image translations.
|
||||
# Different from official models and other implementations, this is an RGB-input model (rather than BGR)
|
||||
# and in this way it works better for gradio's RGB protocol
|
||||
|
||||
import os
|
||||
import cv2
|
||||
import torch
|
||||
import numpy as np
|
||||
|
||||
from einops import rearrange
|
||||
import os
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
from annotator.util import safe_step, nms
|
||||
|
||||
|
||||
class DoubleConvBlock(torch.nn.Module):
|
||||
def __init__(self, input_channel, output_channel, layer_number):
|
||||
super().__init__()
|
||||
self.convs = torch.nn.Sequential()
|
||||
self.convs.append(torch.nn.Conv2d(in_channels=input_channel, out_channels=output_channel, kernel_size=(3, 3), stride=(1, 1), padding=1))
|
||||
for i in range(1, layer_number):
|
||||
self.convs.append(torch.nn.Conv2d(in_channels=output_channel, out_channels=output_channel, kernel_size=(3, 3), stride=(1, 1), padding=1))
|
||||
self.projection = torch.nn.Conv2d(in_channels=output_channel, out_channels=1, kernel_size=(1, 1), stride=(1, 1), padding=0)
|
||||
|
||||
def __call__(self, x, down_sampling=False):
|
||||
h = x
|
||||
if down_sampling:
|
||||
h = torch.nn.functional.max_pool2d(h, kernel_size=(2, 2), stride=(2, 2))
|
||||
for conv in self.convs:
|
||||
h = conv(h)
|
||||
h = torch.nn.functional.relu(h)
|
||||
return h, self.projection(h)
|
||||
|
||||
|
||||
class ControlNetHED_Apache2(torch.nn.Module):
|
||||
def __init__(self):
|
||||
super().__init__()
|
||||
self.norm = torch.nn.Parameter(torch.zeros(size=(1, 3, 1, 1)))
|
||||
self.block1 = DoubleConvBlock(input_channel=3, output_channel=64, layer_number=2)
|
||||
self.block2 = DoubleConvBlock(input_channel=64, output_channel=128, layer_number=2)
|
||||
self.block3 = DoubleConvBlock(input_channel=128, output_channel=256, layer_number=3)
|
||||
self.block4 = DoubleConvBlock(input_channel=256, output_channel=512, layer_number=3)
|
||||
self.block5 = DoubleConvBlock(input_channel=512, output_channel=512, layer_number=3)
|
||||
|
||||
def __call__(self, x):
|
||||
h = x - self.norm
|
||||
h, projection1 = self.block1(h)
|
||||
h, projection2 = self.block2(h, down_sampling=True)
|
||||
h, projection3 = self.block3(h, down_sampling=True)
|
||||
h, projection4 = self.block4(h, down_sampling=True)
|
||||
h, projection5 = self.block5(h, down_sampling=True)
|
||||
return projection1, projection2, projection3, projection4, projection5
|
||||
|
||||
|
||||
netNetwork = None
|
||||
remote_model_path = "https://huggingface.co/lllyasviel/Annotators/resolve/main/ControlNetHED.pth"
|
||||
modeldir = os.path.join(models_path, "hed")
|
||||
old_modeldir = os.path.dirname(os.path.realpath(__file__))
|
||||
|
||||
|
||||
def apply_hed(input_image, is_safe=False):
|
||||
global netNetwork
|
||||
if netNetwork is None:
|
||||
modelpath = os.path.join(modeldir, "ControlNetHED.pth")
|
||||
old_modelpath = os.path.join(old_modeldir, "ControlNetHED.pth")
|
||||
if os.path.exists(old_modelpath):
|
||||
modelpath = old_modelpath
|
||||
elif not os.path.exists(modelpath):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=modeldir)
|
||||
netNetwork = ControlNetHED_Apache2().to(devices.get_device_for("controlnet"))
|
||||
netNetwork.load_state_dict(torch.load(modelpath, map_location='cpu'))
|
||||
netNetwork.to(devices.get_device_for("controlnet")).float().eval()
|
||||
|
||||
assert input_image.ndim == 3
|
||||
H, W, C = input_image.shape
|
||||
with torch.no_grad():
|
||||
image_hed = torch.from_numpy(input_image.copy()).float().to(devices.get_device_for("controlnet"))
|
||||
image_hed = rearrange(image_hed, 'h w c -> 1 c h w')
|
||||
edges = netNetwork(image_hed)
|
||||
edges = [e.detach().cpu().numpy().astype(np.float32)[0, 0] for e in edges]
|
||||
edges = [cv2.resize(e, (W, H), interpolation=cv2.INTER_LINEAR) for e in edges]
|
||||
edges = np.stack(edges, axis=2)
|
||||
edge = 1 / (1 + np.exp(-np.mean(edges, axis=2).astype(np.float64)))
|
||||
if is_safe:
|
||||
edge = safe_step(edge)
|
||||
edge = (edge * 255.0).clip(0, 255).astype(np.uint8)
|
||||
return edge
|
||||
|
||||
|
||||
def unload_hed_model():
|
||||
global netNetwork
|
||||
if netNetwork is not None:
|
||||
netNetwork.cpu()
|
||||
@@ -0,0 +1,212 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
import torch
|
||||
|
||||
import os
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
|
||||
import mmcv
|
||||
from mmdet.apis import inference_detector, init_detector
|
||||
from mmpose.apis import inference_top_down_pose_model
|
||||
from mmpose.apis import init_pose_model, process_mmdet_results, vis_pose_result
|
||||
|
||||
|
||||
def preprocessing(image, device):
|
||||
# Resize
|
||||
scale = 640 / max(image.shape[:2])
|
||||
image = cv2.resize(image, dsize=None, fx=scale, fy=scale)
|
||||
raw_image = image.astype(np.uint8)
|
||||
|
||||
# Subtract mean values
|
||||
image = image.astype(np.float32)
|
||||
image -= np.array(
|
||||
[
|
||||
float(104.008),
|
||||
float(116.669),
|
||||
float(122.675),
|
||||
]
|
||||
)
|
||||
|
||||
# Convert to torch.Tensor and add "batch" axis
|
||||
image = torch.from_numpy(image.transpose(2, 0, 1)).float().unsqueeze(0)
|
||||
image = image.to(device)
|
||||
|
||||
return image, raw_image
|
||||
|
||||
|
||||
def imshow_keypoints(img,
|
||||
pose_result,
|
||||
skeleton=None,
|
||||
kpt_score_thr=0.1,
|
||||
pose_kpt_color=None,
|
||||
pose_link_color=None,
|
||||
radius=4,
|
||||
thickness=1):
|
||||
"""Draw keypoints and links on an image.
|
||||
Args:
|
||||
img (ndarry): The image to draw poses on.
|
||||
pose_result (list[kpts]): The poses to draw. Each element kpts is
|
||||
a set of K keypoints as an Kx3 numpy.ndarray, where each
|
||||
keypoint is represented as x, y, score.
|
||||
kpt_score_thr (float, optional): Minimum score of keypoints
|
||||
to be shown. Default: 0.3.
|
||||
pose_kpt_color (np.array[Nx3]`): Color of N keypoints. If None,
|
||||
the keypoint will not be drawn.
|
||||
pose_link_color (np.array[Mx3]): Color of M links. If None, the
|
||||
links will not be drawn.
|
||||
thickness (int): Thickness of lines.
|
||||
"""
|
||||
|
||||
img_h, img_w, _ = img.shape
|
||||
img = np.zeros(img.shape)
|
||||
|
||||
for idx, kpts in enumerate(pose_result):
|
||||
if idx > 1:
|
||||
continue
|
||||
kpts = kpts['keypoints']
|
||||
# print(kpts)
|
||||
kpts = np.array(kpts, copy=False)
|
||||
|
||||
# draw each point on image
|
||||
if pose_kpt_color is not None:
|
||||
assert len(pose_kpt_color) == len(kpts)
|
||||
|
||||
for kid, kpt in enumerate(kpts):
|
||||
x_coord, y_coord, kpt_score = int(kpt[0]), int(kpt[1]), kpt[2]
|
||||
|
||||
if kpt_score < kpt_score_thr or pose_kpt_color[kid] is None:
|
||||
# skip the point that should not be drawn
|
||||
continue
|
||||
|
||||
color = tuple(int(c) for c in pose_kpt_color[kid])
|
||||
cv2.circle(img, (int(x_coord), int(y_coord)),
|
||||
radius, color, -1)
|
||||
|
||||
# draw links
|
||||
if skeleton is not None and pose_link_color is not None:
|
||||
assert len(pose_link_color) == len(skeleton)
|
||||
|
||||
for sk_id, sk in enumerate(skeleton):
|
||||
pos1 = (int(kpts[sk[0], 0]), int(kpts[sk[0], 1]))
|
||||
pos2 = (int(kpts[sk[1], 0]), int(kpts[sk[1], 1]))
|
||||
|
||||
if (pos1[0] <= 0 or pos1[0] >= img_w or pos1[1] <= 0 or pos1[1] >= img_h or pos2[0] <= 0
|
||||
or pos2[0] >= img_w or pos2[1] <= 0 or pos2[1] >= img_h or kpts[sk[0], 2] < kpt_score_thr
|
||||
or kpts[sk[1], 2] < kpt_score_thr or pose_link_color[sk_id] is None):
|
||||
# skip the link that should not be drawn
|
||||
continue
|
||||
color = tuple(int(c) for c in pose_link_color[sk_id])
|
||||
cv2.line(img, pos1, pos2, color, thickness=thickness)
|
||||
|
||||
return img
|
||||
|
||||
|
||||
human_det, pose_model = None, None
|
||||
det_model_path = "https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth"
|
||||
pose_model_path = "https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth"
|
||||
|
||||
modeldir = os.path.join(models_path, "keypose")
|
||||
old_modeldir = os.path.dirname(os.path.realpath(__file__))
|
||||
|
||||
det_config = 'faster_rcnn_r50_fpn_coco.py'
|
||||
pose_config = 'hrnet_w48_coco_256x192.py'
|
||||
|
||||
det_checkpoint = 'faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth'
|
||||
pose_checkpoint = 'hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth'
|
||||
det_cat_id = 1
|
||||
bbox_thr = 0.2
|
||||
|
||||
skeleton = [
|
||||
[15, 13], [13, 11], [16, 14], [14, 12], [11, 12], [5, 11], [6, 12], [5, 6], [5, 7], [6, 8],
|
||||
[7, 9], [8, 10],
|
||||
[1, 2], [0, 1], [0, 2], [1, 3], [2, 4], [3, 5], [4, 6]
|
||||
]
|
||||
|
||||
pose_kpt_color = [
|
||||
[51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255],
|
||||
[0, 255, 0],
|
||||
[255, 128, 0], [0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0], [0, 255, 0],
|
||||
[255, 128, 0],
|
||||
[0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0]
|
||||
]
|
||||
|
||||
pose_link_color = [
|
||||
[0, 255, 0], [0, 255, 0], [255, 128, 0], [255, 128, 0],
|
||||
[51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [0, 255, 0],
|
||||
[255, 128, 0],
|
||||
[0, 255, 0], [255, 128, 0], [51, 153, 255], [51, 153, 255], [51, 153, 255],
|
||||
[51, 153, 255],
|
||||
[51, 153, 255], [51, 153, 255], [51, 153, 255]
|
||||
]
|
||||
|
||||
def find_download_model(checkpoint, remote_path):
|
||||
modelpath = os.path.join(modeldir, checkpoint)
|
||||
old_modelpath = os.path.join(old_modeldir, checkpoint)
|
||||
|
||||
if os.path.exists(old_modelpath):
|
||||
modelpath = old_modelpath
|
||||
elif not os.path.exists(modelpath):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_path, model_dir=modeldir)
|
||||
|
||||
return modelpath
|
||||
|
||||
def apply_keypose(input_image):
|
||||
global human_det, pose_model
|
||||
if netNetwork is None:
|
||||
det_model_local = find_download_model(det_checkpoint, det_model_path)
|
||||
hrnet_model_local = find_download_model(pose_checkpoint, pose_model_path)
|
||||
det_config_mmcv = mmcv.Config.fromfile(det_config)
|
||||
pose_config_mmcv = mmcv.Config.fromfile(pose_config)
|
||||
human_det = init_detector(det_config_mmcv, det_model_local, device=devices.get_device_for("controlnet"))
|
||||
pose_model = init_pose_model(pose_config_mmcv, hrnet_model_local, device=devices.get_device_for("controlnet"))
|
||||
|
||||
assert input_image.ndim == 3
|
||||
input_image = input_image.copy()
|
||||
with torch.no_grad():
|
||||
image = torch.from_numpy(input_image).float().to(devices.get_device_for("controlnet"))
|
||||
image = image / 255.0
|
||||
mmdet_results = inference_detector(human_det, image)
|
||||
|
||||
# keep the person class bounding boxes.
|
||||
person_results = process_mmdet_results(mmdet_results, det_cat_id)
|
||||
|
||||
return_heatmap = False
|
||||
dataset = pose_model.cfg.data['test']['type']
|
||||
|
||||
# e.g. use ('backbone', ) to return backbone feature
|
||||
output_layer_names = None
|
||||
pose_results, _ = inference_top_down_pose_model(
|
||||
pose_model,
|
||||
image,
|
||||
person_results,
|
||||
bbox_thr=bbox_thr,
|
||||
format='xyxy',
|
||||
dataset=dataset,
|
||||
dataset_info=None,
|
||||
return_heatmap=return_heatmap,
|
||||
outputs=output_layer_names
|
||||
)
|
||||
|
||||
im_keypose_out = imshow_keypoints(
|
||||
image,
|
||||
pose_results,
|
||||
skeleton=skeleton,
|
||||
pose_kpt_color=pose_kpt_color,
|
||||
pose_link_color=pose_link_color,
|
||||
radius=2,
|
||||
thickness=2
|
||||
)
|
||||
im_keypose_out = im_keypose_out.astype(np.uint8)
|
||||
|
||||
# image_hed = rearrange(image_hed, 'h w c -> 1 c h w')
|
||||
# edge = netNetwork(image_hed)[0]
|
||||
# edge = (edge.cpu().numpy() * 255.0).clip(0, 255).astype(np.uint8)
|
||||
return im_keypose_out
|
||||
|
||||
|
||||
def unload_hed_model():
|
||||
global netNetwork
|
||||
if netNetwork is not None:
|
||||
netNetwork.cpu()
|
||||
@@ -0,0 +1,182 @@
|
||||
checkpoint_config = dict(interval=1)
|
||||
# yapf:disable
|
||||
log_config = dict(
|
||||
interval=50,
|
||||
hooks=[
|
||||
dict(type='TextLoggerHook'),
|
||||
# dict(type='TensorboardLoggerHook')
|
||||
])
|
||||
# yapf:enable
|
||||
dist_params = dict(backend='nccl')
|
||||
log_level = 'INFO'
|
||||
load_from = None
|
||||
resume_from = None
|
||||
workflow = [('train', 1)]
|
||||
# optimizer
|
||||
optimizer = dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001)
|
||||
optimizer_config = dict(grad_clip=None)
|
||||
# learning policy
|
||||
lr_config = dict(
|
||||
policy='step',
|
||||
warmup='linear',
|
||||
warmup_iters=500,
|
||||
warmup_ratio=0.001,
|
||||
step=[8, 11])
|
||||
total_epochs = 12
|
||||
|
||||
model = dict(
|
||||
type='FasterRCNN',
|
||||
pretrained='torchvision://resnet50',
|
||||
backbone=dict(
|
||||
type='ResNet',
|
||||
depth=50,
|
||||
num_stages=4,
|
||||
out_indices=(0, 1, 2, 3),
|
||||
frozen_stages=1,
|
||||
norm_cfg=dict(type='BN', requires_grad=True),
|
||||
norm_eval=True,
|
||||
style='pytorch'),
|
||||
neck=dict(
|
||||
type='FPN',
|
||||
in_channels=[256, 512, 1024, 2048],
|
||||
out_channels=256,
|
||||
num_outs=5),
|
||||
rpn_head=dict(
|
||||
type='RPNHead',
|
||||
in_channels=256,
|
||||
feat_channels=256,
|
||||
anchor_generator=dict(
|
||||
type='AnchorGenerator',
|
||||
scales=[8],
|
||||
ratios=[0.5, 1.0, 2.0],
|
||||
strides=[4, 8, 16, 32, 64]),
|
||||
bbox_coder=dict(
|
||||
type='DeltaXYWHBBoxCoder',
|
||||
target_means=[.0, .0, .0, .0],
|
||||
target_stds=[1.0, 1.0, 1.0, 1.0]),
|
||||
loss_cls=dict(
|
||||
type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
|
||||
loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
|
||||
roi_head=dict(
|
||||
type='StandardRoIHead',
|
||||
bbox_roi_extractor=dict(
|
||||
type='SingleRoIExtractor',
|
||||
roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
|
||||
out_channels=256,
|
||||
featmap_strides=[4, 8, 16, 32]),
|
||||
bbox_head=dict(
|
||||
type='Shared2FCBBoxHead',
|
||||
in_channels=256,
|
||||
fc_out_channels=1024,
|
||||
roi_feat_size=7,
|
||||
num_classes=80,
|
||||
bbox_coder=dict(
|
||||
type='DeltaXYWHBBoxCoder',
|
||||
target_means=[0., 0., 0., 0.],
|
||||
target_stds=[0.1, 0.1, 0.2, 0.2]),
|
||||
reg_class_agnostic=False,
|
||||
loss_cls=dict(
|
||||
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
|
||||
loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
|
||||
# model training and testing settings
|
||||
train_cfg=dict(
|
||||
rpn=dict(
|
||||
assigner=dict(
|
||||
type='MaxIoUAssigner',
|
||||
pos_iou_thr=0.7,
|
||||
neg_iou_thr=0.3,
|
||||
min_pos_iou=0.3,
|
||||
match_low_quality=True,
|
||||
ignore_iof_thr=-1),
|
||||
sampler=dict(
|
||||
type='RandomSampler',
|
||||
num=256,
|
||||
pos_fraction=0.5,
|
||||
neg_pos_ub=-1,
|
||||
add_gt_as_proposals=False),
|
||||
allowed_border=-1,
|
||||
pos_weight=-1,
|
||||
debug=False),
|
||||
rpn_proposal=dict(
|
||||
nms_pre=2000,
|
||||
max_per_img=1000,
|
||||
nms=dict(type='nms', iou_threshold=0.7),
|
||||
min_bbox_size=0),
|
||||
rcnn=dict(
|
||||
assigner=dict(
|
||||
type='MaxIoUAssigner',
|
||||
pos_iou_thr=0.5,
|
||||
neg_iou_thr=0.5,
|
||||
min_pos_iou=0.5,
|
||||
match_low_quality=False,
|
||||
ignore_iof_thr=-1),
|
||||
sampler=dict(
|
||||
type='RandomSampler',
|
||||
num=512,
|
||||
pos_fraction=0.25,
|
||||
neg_pos_ub=-1,
|
||||
add_gt_as_proposals=True),
|
||||
pos_weight=-1,
|
||||
debug=False)),
|
||||
test_cfg=dict(
|
||||
rpn=dict(
|
||||
nms_pre=1000,
|
||||
max_per_img=1000,
|
||||
nms=dict(type='nms', iou_threshold=0.7),
|
||||
min_bbox_size=0),
|
||||
rcnn=dict(
|
||||
score_thr=0.05,
|
||||
nms=dict(type='nms', iou_threshold=0.5),
|
||||
max_per_img=100)
|
||||
# soft-nms is also supported for rcnn testing
|
||||
# e.g., nms=dict(type='soft_nms', iou_threshold=0.5, min_score=0.05)
|
||||
))
|
||||
|
||||
dataset_type = 'CocoDataset'
|
||||
data_root = 'data/coco'
|
||||
img_norm_cfg = dict(
|
||||
mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
|
||||
train_pipeline = [
|
||||
dict(type='LoadImageFromFile'),
|
||||
dict(type='LoadAnnotations', with_bbox=True),
|
||||
dict(type='Resize', img_scale=(1333, 800), keep_ratio=True),
|
||||
dict(type='RandomFlip', flip_ratio=0.5),
|
||||
dict(type='Normalize', **img_norm_cfg),
|
||||
dict(type='Pad', size_divisor=32),
|
||||
dict(type='DefaultFormatBundle'),
|
||||
dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels']),
|
||||
]
|
||||
test_pipeline = [
|
||||
dict(type='LoadImageFromFile'),
|
||||
dict(
|
||||
type='MultiScaleFlipAug',
|
||||
img_scale=(1333, 800),
|
||||
flip=False,
|
||||
transforms=[
|
||||
dict(type='Resize', keep_ratio=True),
|
||||
dict(type='RandomFlip'),
|
||||
dict(type='Normalize', **img_norm_cfg),
|
||||
dict(type='Pad', size_divisor=32),
|
||||
dict(type='DefaultFormatBundle'),
|
||||
dict(type='Collect', keys=['img']),
|
||||
])
|
||||
]
|
||||
data = dict(
|
||||
samples_per_gpu=2,
|
||||
workers_per_gpu=2,
|
||||
train=dict(
|
||||
type=dataset_type,
|
||||
ann_file=f'{data_root}/annotations/instances_train2017.json',
|
||||
img_prefix=f'{data_root}/train2017/',
|
||||
pipeline=train_pipeline),
|
||||
val=dict(
|
||||
type=dataset_type,
|
||||
ann_file=f'{data_root}/annotations/instances_val2017.json',
|
||||
img_prefix=f'{data_root}/val2017/',
|
||||
pipeline=test_pipeline),
|
||||
test=dict(
|
||||
type=dataset_type,
|
||||
ann_file=f'{data_root}/annotations/instances_val2017.json',
|
||||
img_prefix=f'{data_root}/val2017/',
|
||||
pipeline=test_pipeline))
|
||||
evaluation = dict(interval=1, metric='bbox')
|
||||
@@ -0,0 +1,169 @@
|
||||
# _base_ = [
|
||||
# '../../../../_base_/default_runtime.py',
|
||||
# '../../../../_base_/datasets/coco.py'
|
||||
# ]
|
||||
evaluation = dict(interval=10, metric='mAP', save_best='AP')
|
||||
|
||||
optimizer = dict(
|
||||
type='Adam',
|
||||
lr=5e-4,
|
||||
)
|
||||
optimizer_config = dict(grad_clip=None)
|
||||
# learning policy
|
||||
lr_config = dict(
|
||||
policy='step',
|
||||
warmup='linear',
|
||||
warmup_iters=500,
|
||||
warmup_ratio=0.001,
|
||||
step=[170, 200])
|
||||
total_epochs = 210
|
||||
channel_cfg = dict(
|
||||
num_output_channels=17,
|
||||
dataset_joints=17,
|
||||
dataset_channel=[
|
||||
[0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16],
|
||||
],
|
||||
inference_channel=[
|
||||
0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16
|
||||
])
|
||||
|
||||
# model settings
|
||||
model = dict(
|
||||
type='TopDown',
|
||||
pretrained='https://download.openmmlab.com/mmpose/'
|
||||
'pretrain_models/hrnet_w48-8ef0771d.pth',
|
||||
backbone=dict(
|
||||
type='HRNet',
|
||||
in_channels=3,
|
||||
extra=dict(
|
||||
stage1=dict(
|
||||
num_modules=1,
|
||||
num_branches=1,
|
||||
block='BOTTLENECK',
|
||||
num_blocks=(4, ),
|
||||
num_channels=(64, )),
|
||||
stage2=dict(
|
||||
num_modules=1,
|
||||
num_branches=2,
|
||||
block='BASIC',
|
||||
num_blocks=(4, 4),
|
||||
num_channels=(48, 96)),
|
||||
stage3=dict(
|
||||
num_modules=4,
|
||||
num_branches=3,
|
||||
block='BASIC',
|
||||
num_blocks=(4, 4, 4),
|
||||
num_channels=(48, 96, 192)),
|
||||
stage4=dict(
|
||||
num_modules=3,
|
||||
num_branches=4,
|
||||
block='BASIC',
|
||||
num_blocks=(4, 4, 4, 4),
|
||||
num_channels=(48, 96, 192, 384))),
|
||||
),
|
||||
keypoint_head=dict(
|
||||
type='TopdownHeatmapSimpleHead',
|
||||
in_channels=48,
|
||||
out_channels=channel_cfg['num_output_channels'],
|
||||
num_deconv_layers=0,
|
||||
extra=dict(final_conv_kernel=1, ),
|
||||
loss_keypoint=dict(type='JointsMSELoss', use_target_weight=True)),
|
||||
train_cfg=dict(),
|
||||
test_cfg=dict(
|
||||
flip_test=True,
|
||||
post_process='default',
|
||||
shift_heatmap=True,
|
||||
modulate_kernel=11))
|
||||
|
||||
data_cfg = dict(
|
||||
image_size=[192, 256],
|
||||
heatmap_size=[48, 64],
|
||||
num_output_channels=channel_cfg['num_output_channels'],
|
||||
num_joints=channel_cfg['dataset_joints'],
|
||||
dataset_channel=channel_cfg['dataset_channel'],
|
||||
inference_channel=channel_cfg['inference_channel'],
|
||||
soft_nms=False,
|
||||
nms_thr=1.0,
|
||||
oks_thr=0.9,
|
||||
vis_thr=0.2,
|
||||
use_gt_bbox=False,
|
||||
det_bbox_thr=0.0,
|
||||
bbox_file='data/coco/person_detection_results/'
|
||||
'COCO_val2017_detections_AP_H_56_person.json',
|
||||
)
|
||||
|
||||
train_pipeline = [
|
||||
dict(type='LoadImageFromFile'),
|
||||
dict(type='TopDownGetBboxCenterScale', padding=1.25),
|
||||
dict(type='TopDownRandomShiftBboxCenter', shift_factor=0.16, prob=0.3),
|
||||
dict(type='TopDownRandomFlip', flip_prob=0.5),
|
||||
dict(
|
||||
type='TopDownHalfBodyTransform',
|
||||
num_joints_half_body=8,
|
||||
prob_half_body=0.3),
|
||||
dict(
|
||||
type='TopDownGetRandomScaleRotation', rot_factor=40, scale_factor=0.5),
|
||||
dict(type='TopDownAffine'),
|
||||
dict(type='ToTensor'),
|
||||
dict(
|
||||
type='NormalizeTensor',
|
||||
mean=[0.485, 0.456, 0.406],
|
||||
std=[0.229, 0.224, 0.225]),
|
||||
dict(type='TopDownGenerateTarget', sigma=2),
|
||||
dict(
|
||||
type='Collect',
|
||||
keys=['img', 'target', 'target_weight'],
|
||||
meta_keys=[
|
||||
'image_file', 'joints_3d', 'joints_3d_visible', 'center', 'scale',
|
||||
'rotation', 'bbox_score', 'flip_pairs'
|
||||
]),
|
||||
]
|
||||
|
||||
val_pipeline = [
|
||||
dict(type='LoadImageFromFile'),
|
||||
dict(type='TopDownGetBboxCenterScale', padding=1.25),
|
||||
dict(type='TopDownAffine'),
|
||||
dict(type='ToTensor'),
|
||||
dict(
|
||||
type='NormalizeTensor',
|
||||
mean=[0.485, 0.456, 0.406],
|
||||
std=[0.229, 0.224, 0.225]),
|
||||
dict(
|
||||
type='Collect',
|
||||
keys=['img'],
|
||||
meta_keys=[
|
||||
'image_file', 'center', 'scale', 'rotation', 'bbox_score',
|
||||
'flip_pairs'
|
||||
]),
|
||||
]
|
||||
|
||||
test_pipeline = val_pipeline
|
||||
|
||||
data_root = 'data/coco'
|
||||
data = dict(
|
||||
samples_per_gpu=32,
|
||||
workers_per_gpu=2,
|
||||
val_dataloader=dict(samples_per_gpu=32),
|
||||
test_dataloader=dict(samples_per_gpu=32),
|
||||
train=dict(
|
||||
type='TopDownCocoDataset',
|
||||
ann_file=f'{data_root}/annotations/person_keypoints_train2017.json',
|
||||
img_prefix=f'{data_root}/train2017/',
|
||||
data_cfg=data_cfg,
|
||||
pipeline=train_pipeline,
|
||||
dataset_info={{_base_.dataset_info}}),
|
||||
val=dict(
|
||||
type='TopDownCocoDataset',
|
||||
ann_file=f'{data_root}/annotations/person_keypoints_val2017.json',
|
||||
img_prefix=f'{data_root}/val2017/',
|
||||
data_cfg=data_cfg,
|
||||
pipeline=val_pipeline,
|
||||
dataset_info={{_base_.dataset_info}}),
|
||||
test=dict(
|
||||
type='TopDownCocoDataset',
|
||||
ann_file=f'{data_root}/annotations/person_keypoints_val2017.json',
|
||||
img_prefix=f'{data_root}/val2017/',
|
||||
data_cfg=data_cfg,
|
||||
pipeline=test_pipeline,
|
||||
dataset_info={{_base_.dataset_info}}),
|
||||
)
|
||||
@@ -0,0 +1,58 @@
|
||||
# https://github.com/advimman/lama
|
||||
|
||||
import yaml
|
||||
import torch
|
||||
from omegaconf import OmegaConf
|
||||
import numpy as np
|
||||
|
||||
from einops import rearrange
|
||||
import os
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
from annotator.lama.saicinpainting.training.trainers import load_checkpoint
|
||||
|
||||
|
||||
class LamaInpainting:
|
||||
model_dir = os.path.join(models_path, "lama")
|
||||
|
||||
def __init__(self):
|
||||
self.model = None
|
||||
self.device = devices.get_device_for("controlnet")
|
||||
|
||||
def load_model(self):
|
||||
remote_model_path = "https://huggingface.co/lllyasviel/Annotators/resolve/main/ControlNetLama.pth"
|
||||
modelpath = os.path.join(self.model_dir, "ControlNetLama.pth")
|
||||
if not os.path.exists(modelpath):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=self.model_dir)
|
||||
config_path = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'config.yaml')
|
||||
cfg = yaml.safe_load(open(config_path, 'rt'))
|
||||
cfg = OmegaConf.create(cfg)
|
||||
cfg.training_model.predict_only = True
|
||||
cfg.visualizer.kind = 'noop'
|
||||
self.model = load_checkpoint(cfg, os.path.abspath(modelpath), strict=False, map_location='cpu')
|
||||
self.model = self.model.to(self.device)
|
||||
self.model.eval()
|
||||
|
||||
def unload_model(self):
|
||||
if self.model is not None:
|
||||
self.model.cpu()
|
||||
|
||||
def __call__(self, input_image):
|
||||
if self.model is None:
|
||||
self.load_model()
|
||||
self.model.to(self.device)
|
||||
color = np.ascontiguousarray(input_image[:, :, 0:3]).astype(np.float32) / 255.0
|
||||
mask = np.ascontiguousarray(input_image[:, :, 3:4]).astype(np.float32) / 255.0
|
||||
with torch.no_grad():
|
||||
color = torch.from_numpy(color).float().to(self.device)
|
||||
mask = torch.from_numpy(mask).float().to(self.device)
|
||||
mask = (mask > 0.5).float()
|
||||
color = color * (1 - mask)
|
||||
image_feed = torch.cat([color, mask], dim=2)
|
||||
image_feed = rearrange(image_feed, 'h w c -> 1 c h w')
|
||||
result = self.model(image_feed)[0]
|
||||
result = rearrange(result, 'c h w -> h w c')
|
||||
result = result * mask + color * (1 - mask)
|
||||
result *= 255.0
|
||||
return result.detach().cpu().numpy().clip(0, 255).astype(np.uint8)
|
||||
@@ -0,0 +1,157 @@
|
||||
run_title: b18_ffc075_batch8x15
|
||||
training_model:
|
||||
kind: default
|
||||
visualize_each_iters: 1000
|
||||
concat_mask: true
|
||||
store_discr_outputs_for_vis: true
|
||||
losses:
|
||||
l1:
|
||||
weight_missing: 0
|
||||
weight_known: 10
|
||||
perceptual:
|
||||
weight: 0
|
||||
adversarial:
|
||||
kind: r1
|
||||
weight: 10
|
||||
gp_coef: 0.001
|
||||
mask_as_fake_target: true
|
||||
allow_scale_mask: true
|
||||
feature_matching:
|
||||
weight: 100
|
||||
resnet_pl:
|
||||
weight: 30
|
||||
weights_path: ${env:TORCH_HOME}
|
||||
|
||||
optimizers:
|
||||
generator:
|
||||
kind: adam
|
||||
lr: 0.001
|
||||
discriminator:
|
||||
kind: adam
|
||||
lr: 0.0001
|
||||
visualizer:
|
||||
key_order:
|
||||
- image
|
||||
- predicted_image
|
||||
- discr_output_fake
|
||||
- discr_output_real
|
||||
- inpainted
|
||||
rescale_keys:
|
||||
- discr_output_fake
|
||||
- discr_output_real
|
||||
kind: directory
|
||||
outdir: /group-volume/User-Driven-Content-Generation/r.suvorov/inpainting/experiments/r.suvorov_2021-04-30_14-41-12_train_simple_pix2pix2_gap_sdpl_novgg_large_b18_ffc075_batch8x15/samples
|
||||
location:
|
||||
data_root_dir: /group-volume/User-Driven-Content-Generation/datasets/inpainting_data_root_large
|
||||
out_root_dir: /group-volume/User-Driven-Content-Generation/${env:USER}/inpainting/experiments
|
||||
tb_dir: /group-volume/User-Driven-Content-Generation/${env:USER}/inpainting/tb_logs
|
||||
data:
|
||||
batch_size: 15
|
||||
val_batch_size: 2
|
||||
num_workers: 3
|
||||
train:
|
||||
indir: ${location.data_root_dir}/train
|
||||
out_size: 256
|
||||
mask_gen_kwargs:
|
||||
irregular_proba: 1
|
||||
irregular_kwargs:
|
||||
max_angle: 4
|
||||
max_len: 200
|
||||
max_width: 100
|
||||
max_times: 5
|
||||
min_times: 1
|
||||
box_proba: 1
|
||||
box_kwargs:
|
||||
margin: 10
|
||||
bbox_min_size: 30
|
||||
bbox_max_size: 150
|
||||
max_times: 3
|
||||
min_times: 1
|
||||
segm_proba: 0
|
||||
segm_kwargs:
|
||||
confidence_threshold: 0.5
|
||||
max_object_area: 0.5
|
||||
min_mask_area: 0.07
|
||||
downsample_levels: 6
|
||||
num_variants_per_mask: 1
|
||||
rigidness_mode: 1
|
||||
max_foreground_coverage: 0.3
|
||||
max_foreground_intersection: 0.7
|
||||
max_mask_intersection: 0.1
|
||||
max_hidden_area: 0.1
|
||||
max_scale_change: 0.25
|
||||
horizontal_flip: true
|
||||
max_vertical_shift: 0.2
|
||||
position_shuffle: true
|
||||
transform_variant: distortions
|
||||
dataloader_kwargs:
|
||||
batch_size: ${data.batch_size}
|
||||
shuffle: true
|
||||
num_workers: ${data.num_workers}
|
||||
val:
|
||||
indir: ${location.data_root_dir}/val
|
||||
img_suffix: .png
|
||||
dataloader_kwargs:
|
||||
batch_size: ${data.val_batch_size}
|
||||
shuffle: false
|
||||
num_workers: ${data.num_workers}
|
||||
visual_test:
|
||||
indir: ${location.data_root_dir}/korean_test
|
||||
img_suffix: _input.png
|
||||
pad_out_to_modulo: 32
|
||||
dataloader_kwargs:
|
||||
batch_size: 1
|
||||
shuffle: false
|
||||
num_workers: ${data.num_workers}
|
||||
generator:
|
||||
kind: ffc_resnet
|
||||
input_nc: 4
|
||||
output_nc: 3
|
||||
ngf: 64
|
||||
n_downsampling: 3
|
||||
n_blocks: 18
|
||||
add_out_act: sigmoid
|
||||
init_conv_kwargs:
|
||||
ratio_gin: 0
|
||||
ratio_gout: 0
|
||||
enable_lfu: false
|
||||
downsample_conv_kwargs:
|
||||
ratio_gin: ${generator.init_conv_kwargs.ratio_gout}
|
||||
ratio_gout: ${generator.downsample_conv_kwargs.ratio_gin}
|
||||
enable_lfu: false
|
||||
resnet_conv_kwargs:
|
||||
ratio_gin: 0.75
|
||||
ratio_gout: ${generator.resnet_conv_kwargs.ratio_gin}
|
||||
enable_lfu: false
|
||||
discriminator:
|
||||
kind: pix2pixhd_nlayer
|
||||
input_nc: 3
|
||||
ndf: 64
|
||||
n_layers: 4
|
||||
evaluator:
|
||||
kind: default
|
||||
inpainted_key: inpainted
|
||||
integral_kind: ssim_fid100_f1
|
||||
trainer:
|
||||
kwargs:
|
||||
gpus: -1
|
||||
accelerator: ddp
|
||||
max_epochs: 200
|
||||
gradient_clip_val: 1
|
||||
log_gpu_memory: None
|
||||
limit_train_batches: 25000
|
||||
val_check_interval: ${trainer.kwargs.limit_train_batches}
|
||||
log_every_n_steps: 1000
|
||||
precision: 32
|
||||
terminate_on_nan: false
|
||||
check_val_every_n_epoch: 1
|
||||
num_sanity_val_steps: 8
|
||||
limit_val_batches: 1000
|
||||
replace_sampler_ddp: false
|
||||
checkpoint_kwargs:
|
||||
verbose: true
|
||||
save_top_k: 5
|
||||
save_last: true
|
||||
period: 1
|
||||
monitor: val_ssim_fid100_f1_total_mean
|
||||
mode: max
|
||||
@@ -0,0 +1,332 @@
|
||||
import math
|
||||
import random
|
||||
import hashlib
|
||||
import logging
|
||||
from enum import Enum
|
||||
|
||||
import cv2
|
||||
import numpy as np
|
||||
|
||||
# from annotator.lama.saicinpainting.evaluation.masks.mask import SegmentationMask
|
||||
from annotator.lama.saicinpainting.utils import LinearRamp
|
||||
|
||||
LOGGER = logging.getLogger(__name__)
|
||||
|
||||
|
||||
class DrawMethod(Enum):
|
||||
LINE = 'line'
|
||||
CIRCLE = 'circle'
|
||||
SQUARE = 'square'
|
||||
|
||||
|
||||
def make_random_irregular_mask(shape, max_angle=4, max_len=60, max_width=20, min_times=0, max_times=10,
|
||||
draw_method=DrawMethod.LINE):
|
||||
draw_method = DrawMethod(draw_method)
|
||||
|
||||
height, width = shape
|
||||
mask = np.zeros((height, width), np.float32)
|
||||
times = np.random.randint(min_times, max_times + 1)
|
||||
for i in range(times):
|
||||
start_x = np.random.randint(width)
|
||||
start_y = np.random.randint(height)
|
||||
for j in range(1 + np.random.randint(5)):
|
||||
angle = 0.01 + np.random.randint(max_angle)
|
||||
if i % 2 == 0:
|
||||
angle = 2 * 3.1415926 - angle
|
||||
length = 10 + np.random.randint(max_len)
|
||||
brush_w = 5 + np.random.randint(max_width)
|
||||
end_x = np.clip((start_x + length * np.sin(angle)).astype(np.int32), 0, width)
|
||||
end_y = np.clip((start_y + length * np.cos(angle)).astype(np.int32), 0, height)
|
||||
if draw_method == DrawMethod.LINE:
|
||||
cv2.line(mask, (start_x, start_y), (end_x, end_y), 1.0, brush_w)
|
||||
elif draw_method == DrawMethod.CIRCLE:
|
||||
cv2.circle(mask, (start_x, start_y), radius=brush_w, color=1., thickness=-1)
|
||||
elif draw_method == DrawMethod.SQUARE:
|
||||
radius = brush_w // 2
|
||||
mask[start_y - radius:start_y + radius, start_x - radius:start_x + radius] = 1
|
||||
start_x, start_y = end_x, end_y
|
||||
return mask[None, ...]
|
||||
|
||||
|
||||
class RandomIrregularMaskGenerator:
|
||||
def __init__(self, max_angle=4, max_len=60, max_width=20, min_times=0, max_times=10, ramp_kwargs=None,
|
||||
draw_method=DrawMethod.LINE):
|
||||
self.max_angle = max_angle
|
||||
self.max_len = max_len
|
||||
self.max_width = max_width
|
||||
self.min_times = min_times
|
||||
self.max_times = max_times
|
||||
self.draw_method = draw_method
|
||||
self.ramp = LinearRamp(**ramp_kwargs) if ramp_kwargs is not None else None
|
||||
|
||||
def __call__(self, img, iter_i=None, raw_image=None):
|
||||
coef = self.ramp(iter_i) if (self.ramp is not None) and (iter_i is not None) else 1
|
||||
cur_max_len = int(max(1, self.max_len * coef))
|
||||
cur_max_width = int(max(1, self.max_width * coef))
|
||||
cur_max_times = int(self.min_times + 1 + (self.max_times - self.min_times) * coef)
|
||||
return make_random_irregular_mask(img.shape[1:], max_angle=self.max_angle, max_len=cur_max_len,
|
||||
max_width=cur_max_width, min_times=self.min_times, max_times=cur_max_times,
|
||||
draw_method=self.draw_method)
|
||||
|
||||
|
||||
def make_random_rectangle_mask(shape, margin=10, bbox_min_size=30, bbox_max_size=100, min_times=0, max_times=3):
|
||||
height, width = shape
|
||||
mask = np.zeros((height, width), np.float32)
|
||||
bbox_max_size = min(bbox_max_size, height - margin * 2, width - margin * 2)
|
||||
times = np.random.randint(min_times, max_times + 1)
|
||||
for i in range(times):
|
||||
box_width = np.random.randint(bbox_min_size, bbox_max_size)
|
||||
box_height = np.random.randint(bbox_min_size, bbox_max_size)
|
||||
start_x = np.random.randint(margin, width - margin - box_width + 1)
|
||||
start_y = np.random.randint(margin, height - margin - box_height + 1)
|
||||
mask[start_y:start_y + box_height, start_x:start_x + box_width] = 1
|
||||
return mask[None, ...]
|
||||
|
||||
|
||||
class RandomRectangleMaskGenerator:
|
||||
def __init__(self, margin=10, bbox_min_size=30, bbox_max_size=100, min_times=0, max_times=3, ramp_kwargs=None):
|
||||
self.margin = margin
|
||||
self.bbox_min_size = bbox_min_size
|
||||
self.bbox_max_size = bbox_max_size
|
||||
self.min_times = min_times
|
||||
self.max_times = max_times
|
||||
self.ramp = LinearRamp(**ramp_kwargs) if ramp_kwargs is not None else None
|
||||
|
||||
def __call__(self, img, iter_i=None, raw_image=None):
|
||||
coef = self.ramp(iter_i) if (self.ramp is not None) and (iter_i is not None) else 1
|
||||
cur_bbox_max_size = int(self.bbox_min_size + 1 + (self.bbox_max_size - self.bbox_min_size) * coef)
|
||||
cur_max_times = int(self.min_times + (self.max_times - self.min_times) * coef)
|
||||
return make_random_rectangle_mask(img.shape[1:], margin=self.margin, bbox_min_size=self.bbox_min_size,
|
||||
bbox_max_size=cur_bbox_max_size, min_times=self.min_times,
|
||||
max_times=cur_max_times)
|
||||
|
||||
|
||||
class RandomSegmentationMaskGenerator:
|
||||
def __init__(self, **kwargs):
|
||||
self.impl = None # will be instantiated in first call (effectively in subprocess)
|
||||
self.kwargs = kwargs
|
||||
|
||||
def __call__(self, img, iter_i=None, raw_image=None):
|
||||
if self.impl is None:
|
||||
self.impl = SegmentationMask(**self.kwargs)
|
||||
|
||||
masks = self.impl.get_masks(np.transpose(img, (1, 2, 0)))
|
||||
masks = [m for m in masks if len(np.unique(m)) > 1]
|
||||
return np.random.choice(masks)
|
||||
|
||||
|
||||
def make_random_superres_mask(shape, min_step=2, max_step=4, min_width=1, max_width=3):
|
||||
height, width = shape
|
||||
mask = np.zeros((height, width), np.float32)
|
||||
step_x = np.random.randint(min_step, max_step + 1)
|
||||
width_x = np.random.randint(min_width, min(step_x, max_width + 1))
|
||||
offset_x = np.random.randint(0, step_x)
|
||||
|
||||
step_y = np.random.randint(min_step, max_step + 1)
|
||||
width_y = np.random.randint(min_width, min(step_y, max_width + 1))
|
||||
offset_y = np.random.randint(0, step_y)
|
||||
|
||||
for dy in range(width_y):
|
||||
mask[offset_y + dy::step_y] = 1
|
||||
for dx in range(width_x):
|
||||
mask[:, offset_x + dx::step_x] = 1
|
||||
return mask[None, ...]
|
||||
|
||||
|
||||
class RandomSuperresMaskGenerator:
|
||||
def __init__(self, **kwargs):
|
||||
self.kwargs = kwargs
|
||||
|
||||
def __call__(self, img, iter_i=None):
|
||||
return make_random_superres_mask(img.shape[1:], **self.kwargs)
|
||||
|
||||
|
||||
class DumbAreaMaskGenerator:
|
||||
min_ratio = 0.1
|
||||
max_ratio = 0.35
|
||||
default_ratio = 0.225
|
||||
|
||||
def __init__(self, is_training):
|
||||
#Parameters:
|
||||
# is_training(bool): If true - random rectangular mask, if false - central square mask
|
||||
self.is_training = is_training
|
||||
|
||||
def _random_vector(self, dimension):
|
||||
if self.is_training:
|
||||
lower_limit = math.sqrt(self.min_ratio)
|
||||
upper_limit = math.sqrt(self.max_ratio)
|
||||
mask_side = round((random.random() * (upper_limit - lower_limit) + lower_limit) * dimension)
|
||||
u = random.randint(0, dimension-mask_side-1)
|
||||
v = u+mask_side
|
||||
else:
|
||||
margin = (math.sqrt(self.default_ratio) / 2) * dimension
|
||||
u = round(dimension/2 - margin)
|
||||
v = round(dimension/2 + margin)
|
||||
return u, v
|
||||
|
||||
def __call__(self, img, iter_i=None, raw_image=None):
|
||||
c, height, width = img.shape
|
||||
mask = np.zeros((height, width), np.float32)
|
||||
x1, x2 = self._random_vector(width)
|
||||
y1, y2 = self._random_vector(height)
|
||||
mask[x1:x2, y1:y2] = 1
|
||||
return mask[None, ...]
|
||||
|
||||
|
||||
class OutpaintingMaskGenerator:
|
||||
def __init__(self, min_padding_percent:float=0.04, max_padding_percent:int=0.25, left_padding_prob:float=0.5, top_padding_prob:float=0.5,
|
||||
right_padding_prob:float=0.5, bottom_padding_prob:float=0.5, is_fixed_randomness:bool=False):
|
||||
"""
|
||||
is_fixed_randomness - get identical paddings for the same image if args are the same
|
||||
"""
|
||||
self.min_padding_percent = min_padding_percent
|
||||
self.max_padding_percent = max_padding_percent
|
||||
self.probs = [left_padding_prob, top_padding_prob, right_padding_prob, bottom_padding_prob]
|
||||
self.is_fixed_randomness = is_fixed_randomness
|
||||
|
||||
assert self.min_padding_percent <= self.max_padding_percent
|
||||
assert self.max_padding_percent > 0
|
||||
assert len([x for x in [self.min_padding_percent, self.max_padding_percent] if (x>=0 and x<=1)]) == 2, f"Padding percentage should be in [0,1]"
|
||||
assert sum(self.probs) > 0, f"At least one of the padding probs should be greater than 0 - {self.probs}"
|
||||
assert len([x for x in self.probs if (x >= 0) and (x <= 1)]) == 4, f"At least one of padding probs is not in [0,1] - {self.probs}"
|
||||
if len([x for x in self.probs if x > 0]) == 1:
|
||||
LOGGER.warning(f"Only one padding prob is greater than zero - {self.probs}. That means that the outpainting masks will be always on the same side")
|
||||
|
||||
def apply_padding(self, mask, coord):
|
||||
mask[int(coord[0][0]*self.img_h):int(coord[1][0]*self.img_h),
|
||||
int(coord[0][1]*self.img_w):int(coord[1][1]*self.img_w)] = 1
|
||||
return mask
|
||||
|
||||
def get_padding(self, size):
|
||||
n1 = int(self.min_padding_percent*size)
|
||||
n2 = int(self.max_padding_percent*size)
|
||||
return self.rnd.randint(n1, n2) / size
|
||||
|
||||
@staticmethod
|
||||
def _img2rs(img):
|
||||
arr = np.ascontiguousarray(img.astype(np.uint8))
|
||||
str_hash = hashlib.sha1(arr).hexdigest()
|
||||
res = hash(str_hash)%(2**32)
|
||||
return res
|
||||
|
||||
def __call__(self, img, iter_i=None, raw_image=None):
|
||||
c, self.img_h, self.img_w = img.shape
|
||||
mask = np.zeros((self.img_h, self.img_w), np.float32)
|
||||
at_least_one_mask_applied = False
|
||||
|
||||
if self.is_fixed_randomness:
|
||||
assert raw_image is not None, f"Cant calculate hash on raw_image=None"
|
||||
rs = self._img2rs(raw_image)
|
||||
self.rnd = np.random.RandomState(rs)
|
||||
else:
|
||||
self.rnd = np.random
|
||||
|
||||
coords = [[
|
||||
(0,0),
|
||||
(1,self.get_padding(size=self.img_h))
|
||||
],
|
||||
[
|
||||
(0,0),
|
||||
(self.get_padding(size=self.img_w),1)
|
||||
],
|
||||
[
|
||||
(0,1-self.get_padding(size=self.img_h)),
|
||||
(1,1)
|
||||
],
|
||||
[
|
||||
(1-self.get_padding(size=self.img_w),0),
|
||||
(1,1)
|
||||
]]
|
||||
|
||||
for pp, coord in zip(self.probs, coords):
|
||||
if self.rnd.random() < pp:
|
||||
at_least_one_mask_applied = True
|
||||
mask = self.apply_padding(mask=mask, coord=coord)
|
||||
|
||||
if not at_least_one_mask_applied:
|
||||
idx = self.rnd.choice(range(len(coords)), p=np.array(self.probs)/sum(self.probs))
|
||||
mask = self.apply_padding(mask=mask, coord=coords[idx])
|
||||
return mask[None, ...]
|
||||
|
||||
|
||||
class MixedMaskGenerator:
|
||||
def __init__(self, irregular_proba=1/3, irregular_kwargs=None,
|
||||
box_proba=1/3, box_kwargs=None,
|
||||
segm_proba=1/3, segm_kwargs=None,
|
||||
squares_proba=0, squares_kwargs=None,
|
||||
superres_proba=0, superres_kwargs=None,
|
||||
outpainting_proba=0, outpainting_kwargs=None,
|
||||
invert_proba=0):
|
||||
self.probas = []
|
||||
self.gens = []
|
||||
|
||||
if irregular_proba > 0:
|
||||
self.probas.append(irregular_proba)
|
||||
if irregular_kwargs is None:
|
||||
irregular_kwargs = {}
|
||||
else:
|
||||
irregular_kwargs = dict(irregular_kwargs)
|
||||
irregular_kwargs['draw_method'] = DrawMethod.LINE
|
||||
self.gens.append(RandomIrregularMaskGenerator(**irregular_kwargs))
|
||||
|
||||
if box_proba > 0:
|
||||
self.probas.append(box_proba)
|
||||
if box_kwargs is None:
|
||||
box_kwargs = {}
|
||||
self.gens.append(RandomRectangleMaskGenerator(**box_kwargs))
|
||||
|
||||
if segm_proba > 0:
|
||||
self.probas.append(segm_proba)
|
||||
if segm_kwargs is None:
|
||||
segm_kwargs = {}
|
||||
self.gens.append(RandomSegmentationMaskGenerator(**segm_kwargs))
|
||||
|
||||
if squares_proba > 0:
|
||||
self.probas.append(squares_proba)
|
||||
if squares_kwargs is None:
|
||||
squares_kwargs = {}
|
||||
else:
|
||||
squares_kwargs = dict(squares_kwargs)
|
||||
squares_kwargs['draw_method'] = DrawMethod.SQUARE
|
||||
self.gens.append(RandomIrregularMaskGenerator(**squares_kwargs))
|
||||
|
||||
if superres_proba > 0:
|
||||
self.probas.append(superres_proba)
|
||||
if superres_kwargs is None:
|
||||
superres_kwargs = {}
|
||||
self.gens.append(RandomSuperresMaskGenerator(**superres_kwargs))
|
||||
|
||||
if outpainting_proba > 0:
|
||||
self.probas.append(outpainting_proba)
|
||||
if outpainting_kwargs is None:
|
||||
outpainting_kwargs = {}
|
||||
self.gens.append(OutpaintingMaskGenerator(**outpainting_kwargs))
|
||||
|
||||
self.probas = np.array(self.probas, dtype='float32')
|
||||
self.probas /= self.probas.sum()
|
||||
self.invert_proba = invert_proba
|
||||
|
||||
def __call__(self, img, iter_i=None, raw_image=None):
|
||||
kind = np.random.choice(len(self.probas), p=self.probas)
|
||||
gen = self.gens[kind]
|
||||
result = gen(img, iter_i=iter_i, raw_image=raw_image)
|
||||
if self.invert_proba > 0 and random.random() < self.invert_proba:
|
||||
result = 1 - result
|
||||
return result
|
||||
|
||||
|
||||
def get_mask_generator(kind, kwargs):
|
||||
if kind is None:
|
||||
kind = "mixed"
|
||||
if kwargs is None:
|
||||
kwargs = {}
|
||||
|
||||
if kind == "mixed":
|
||||
cl = MixedMaskGenerator
|
||||
elif kind == "outpainting":
|
||||
cl = OutpaintingMaskGenerator
|
||||
elif kind == "dumb":
|
||||
cl = DumbAreaMaskGenerator
|
||||
else:
|
||||
raise NotImplementedError(f"No such generator kind = {kind}")
|
||||
return cl(**kwargs)
|
||||
@@ -0,0 +1,177 @@
|
||||
from typing import Tuple, Dict, Optional
|
||||
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
|
||||
|
||||
class BaseAdversarialLoss:
|
||||
def pre_generator_step(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
generator: nn.Module, discriminator: nn.Module):
|
||||
"""
|
||||
Prepare for generator step
|
||||
:param real_batch: Tensor, a batch of real samples
|
||||
:param fake_batch: Tensor, a batch of samples produced by generator
|
||||
:param generator:
|
||||
:param discriminator:
|
||||
:return: None
|
||||
"""
|
||||
|
||||
def pre_discriminator_step(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
generator: nn.Module, discriminator: nn.Module):
|
||||
"""
|
||||
Prepare for discriminator step
|
||||
:param real_batch: Tensor, a batch of real samples
|
||||
:param fake_batch: Tensor, a batch of samples produced by generator
|
||||
:param generator:
|
||||
:param discriminator:
|
||||
:return: None
|
||||
"""
|
||||
|
||||
def generator_loss(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
discr_real_pred: torch.Tensor, discr_fake_pred: torch.Tensor,
|
||||
mask: Optional[torch.Tensor] = None) \
|
||||
-> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
"""
|
||||
Calculate generator loss
|
||||
:param real_batch: Tensor, a batch of real samples
|
||||
:param fake_batch: Tensor, a batch of samples produced by generator
|
||||
:param discr_real_pred: Tensor, discriminator output for real_batch
|
||||
:param discr_fake_pred: Tensor, discriminator output for fake_batch
|
||||
:param mask: Tensor, actual mask, which was at input of generator when making fake_batch
|
||||
:return: total generator loss along with some values that might be interesting to log
|
||||
"""
|
||||
raise NotImplemented()
|
||||
|
||||
def discriminator_loss(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
discr_real_pred: torch.Tensor, discr_fake_pred: torch.Tensor,
|
||||
mask: Optional[torch.Tensor] = None) \
|
||||
-> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
"""
|
||||
Calculate discriminator loss and call .backward() on it
|
||||
:param real_batch: Tensor, a batch of real samples
|
||||
:param fake_batch: Tensor, a batch of samples produced by generator
|
||||
:param discr_real_pred: Tensor, discriminator output for real_batch
|
||||
:param discr_fake_pred: Tensor, discriminator output for fake_batch
|
||||
:param mask: Tensor, actual mask, which was at input of generator when making fake_batch
|
||||
:return: total discriminator loss along with some values that might be interesting to log
|
||||
"""
|
||||
raise NotImplemented()
|
||||
|
||||
def interpolate_mask(self, mask, shape):
|
||||
assert mask is not None
|
||||
assert self.allow_scale_mask or shape == mask.shape[-2:]
|
||||
if shape != mask.shape[-2:] and self.allow_scale_mask:
|
||||
if self.mask_scale_mode == 'maxpool':
|
||||
mask = F.adaptive_max_pool2d(mask, shape)
|
||||
else:
|
||||
mask = F.interpolate(mask, size=shape, mode=self.mask_scale_mode)
|
||||
return mask
|
||||
|
||||
def make_r1_gp(discr_real_pred, real_batch):
|
||||
if torch.is_grad_enabled():
|
||||
grad_real = torch.autograd.grad(outputs=discr_real_pred.sum(), inputs=real_batch, create_graph=True)[0]
|
||||
grad_penalty = (grad_real.view(grad_real.shape[0], -1).norm(2, dim=1) ** 2).mean()
|
||||
else:
|
||||
grad_penalty = 0
|
||||
real_batch.requires_grad = False
|
||||
|
||||
return grad_penalty
|
||||
|
||||
class NonSaturatingWithR1(BaseAdversarialLoss):
|
||||
def __init__(self, gp_coef=5, weight=1, mask_as_fake_target=False, allow_scale_mask=False,
|
||||
mask_scale_mode='nearest', extra_mask_weight_for_gen=0,
|
||||
use_unmasked_for_gen=True, use_unmasked_for_discr=True):
|
||||
self.gp_coef = gp_coef
|
||||
self.weight = weight
|
||||
# use for discr => use for gen;
|
||||
# otherwise we teach only the discr to pay attention to very small difference
|
||||
assert use_unmasked_for_gen or (not use_unmasked_for_discr)
|
||||
# mask as target => use unmasked for discr:
|
||||
# if we don't care about unmasked regions at all
|
||||
# then it doesn't matter if the value of mask_as_fake_target is true or false
|
||||
assert use_unmasked_for_discr or (not mask_as_fake_target)
|
||||
self.use_unmasked_for_gen = use_unmasked_for_gen
|
||||
self.use_unmasked_for_discr = use_unmasked_for_discr
|
||||
self.mask_as_fake_target = mask_as_fake_target
|
||||
self.allow_scale_mask = allow_scale_mask
|
||||
self.mask_scale_mode = mask_scale_mode
|
||||
self.extra_mask_weight_for_gen = extra_mask_weight_for_gen
|
||||
|
||||
def generator_loss(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
discr_real_pred: torch.Tensor, discr_fake_pred: torch.Tensor,
|
||||
mask=None) \
|
||||
-> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
fake_loss = F.softplus(-discr_fake_pred)
|
||||
if (self.mask_as_fake_target and self.extra_mask_weight_for_gen > 0) or \
|
||||
not self.use_unmasked_for_gen: # == if masked region should be treated differently
|
||||
mask = self.interpolate_mask(mask, discr_fake_pred.shape[-2:])
|
||||
if not self.use_unmasked_for_gen:
|
||||
fake_loss = fake_loss * mask
|
||||
else:
|
||||
pixel_weights = 1 + mask * self.extra_mask_weight_for_gen
|
||||
fake_loss = fake_loss * pixel_weights
|
||||
|
||||
return fake_loss.mean() * self.weight, dict()
|
||||
|
||||
def pre_discriminator_step(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
generator: nn.Module, discriminator: nn.Module):
|
||||
real_batch.requires_grad = True
|
||||
|
||||
def discriminator_loss(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
discr_real_pred: torch.Tensor, discr_fake_pred: torch.Tensor,
|
||||
mask=None) \
|
||||
-> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
|
||||
real_loss = F.softplus(-discr_real_pred)
|
||||
grad_penalty = make_r1_gp(discr_real_pred, real_batch) * self.gp_coef
|
||||
fake_loss = F.softplus(discr_fake_pred)
|
||||
|
||||
if not self.use_unmasked_for_discr or self.mask_as_fake_target:
|
||||
# == if masked region should be treated differently
|
||||
mask = self.interpolate_mask(mask, discr_fake_pred.shape[-2:])
|
||||
# use_unmasked_for_discr=False only makes sense for fakes;
|
||||
# for reals there is no difference beetween two regions
|
||||
fake_loss = fake_loss * mask
|
||||
if self.mask_as_fake_target:
|
||||
fake_loss = fake_loss + (1 - mask) * F.softplus(-discr_fake_pred)
|
||||
|
||||
sum_discr_loss = real_loss + grad_penalty + fake_loss
|
||||
metrics = dict(discr_real_out=discr_real_pred.mean(),
|
||||
discr_fake_out=discr_fake_pred.mean(),
|
||||
discr_real_gp=grad_penalty)
|
||||
return sum_discr_loss.mean(), metrics
|
||||
|
||||
class BCELoss(BaseAdversarialLoss):
|
||||
def __init__(self, weight):
|
||||
self.weight = weight
|
||||
self.bce_loss = nn.BCEWithLogitsLoss()
|
||||
|
||||
def generator_loss(self, discr_fake_pred: torch.Tensor) -> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
real_mask_gt = torch.zeros(discr_fake_pred.shape).to(discr_fake_pred.device)
|
||||
fake_loss = self.bce_loss(discr_fake_pred, real_mask_gt) * self.weight
|
||||
return fake_loss, dict()
|
||||
|
||||
def pre_discriminator_step(self, real_batch: torch.Tensor, fake_batch: torch.Tensor,
|
||||
generator: nn.Module, discriminator: nn.Module):
|
||||
real_batch.requires_grad = True
|
||||
|
||||
def discriminator_loss(self,
|
||||
mask: torch.Tensor,
|
||||
discr_real_pred: torch.Tensor,
|
||||
discr_fake_pred: torch.Tensor) -> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
|
||||
real_mask_gt = torch.zeros(discr_real_pred.shape).to(discr_real_pred.device)
|
||||
sum_discr_loss = (self.bce_loss(discr_real_pred, real_mask_gt) + self.bce_loss(discr_fake_pred, mask)) / 2
|
||||
metrics = dict(discr_real_out=discr_real_pred.mean(),
|
||||
discr_fake_out=discr_fake_pred.mean(),
|
||||
discr_real_gp=0)
|
||||
return sum_discr_loss, metrics
|
||||
|
||||
|
||||
def make_discrim_loss(kind, **kwargs):
|
||||
if kind == 'r1':
|
||||
return NonSaturatingWithR1(**kwargs)
|
||||
elif kind == 'bce':
|
||||
return BCELoss(**kwargs)
|
||||
raise ValueError(f'Unknown adversarial loss kind {kind}')
|
||||
@@ -0,0 +1,152 @@
|
||||
weights = {"ade20k":
|
||||
[6.34517766497462,
|
||||
9.328358208955224,
|
||||
11.389521640091116,
|
||||
16.10305958132045,
|
||||
20.833333333333332,
|
||||
22.22222222222222,
|
||||
25.125628140703515,
|
||||
43.29004329004329,
|
||||
50.5050505050505,
|
||||
54.6448087431694,
|
||||
55.24861878453038,
|
||||
60.24096385542168,
|
||||
62.5,
|
||||
66.2251655629139,
|
||||
84.74576271186442,
|
||||
90.90909090909092,
|
||||
91.74311926605505,
|
||||
96.15384615384616,
|
||||
96.15384615384616,
|
||||
97.08737864077669,
|
||||
102.04081632653062,
|
||||
135.13513513513513,
|
||||
149.2537313432836,
|
||||
153.84615384615384,
|
||||
163.93442622950818,
|
||||
166.66666666666666,
|
||||
188.67924528301887,
|
||||
192.30769230769232,
|
||||
217.3913043478261,
|
||||
227.27272727272725,
|
||||
227.27272727272725,
|
||||
227.27272727272725,
|
||||
303.03030303030306,
|
||||
322.5806451612903,
|
||||
333.3333333333333,
|
||||
370.3703703703703,
|
||||
384.61538461538464,
|
||||
416.6666666666667,
|
||||
416.6666666666667,
|
||||
434.7826086956522,
|
||||
434.7826086956522,
|
||||
454.5454545454545,
|
||||
454.5454545454545,
|
||||
500.0,
|
||||
526.3157894736842,
|
||||
526.3157894736842,
|
||||
555.5555555555555,
|
||||
555.5555555555555,
|
||||
555.5555555555555,
|
||||
555.5555555555555,
|
||||
555.5555555555555,
|
||||
555.5555555555555,
|
||||
555.5555555555555,
|
||||
588.2352941176471,
|
||||
588.2352941176471,
|
||||
588.2352941176471,
|
||||
588.2352941176471,
|
||||
588.2352941176471,
|
||||
666.6666666666666,
|
||||
666.6666666666666,
|
||||
666.6666666666666,
|
||||
666.6666666666666,
|
||||
714.2857142857143,
|
||||
714.2857142857143,
|
||||
714.2857142857143,
|
||||
714.2857142857143,
|
||||
714.2857142857143,
|
||||
769.2307692307693,
|
||||
769.2307692307693,
|
||||
769.2307692307693,
|
||||
833.3333333333334,
|
||||
833.3333333333334,
|
||||
833.3333333333334,
|
||||
833.3333333333334,
|
||||
909.090909090909,
|
||||
1000.0,
|
||||
1111.111111111111,
|
||||
1111.111111111111,
|
||||
1111.111111111111,
|
||||
1111.111111111111,
|
||||
1111.111111111111,
|
||||
1250.0,
|
||||
1250.0,
|
||||
1250.0,
|
||||
1250.0,
|
||||
1250.0,
|
||||
1428.5714285714287,
|
||||
1428.5714285714287,
|
||||
1428.5714285714287,
|
||||
1428.5714285714287,
|
||||
1428.5714285714287,
|
||||
1428.5714285714287,
|
||||
1428.5714285714287,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
1666.6666666666667,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2000.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
2500.0,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
3333.3333333333335,
|
||||
5000.0,
|
||||
5000.0,
|
||||
5000.0]
|
||||
}
|
||||
@@ -0,0 +1,126 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
import torchvision
|
||||
|
||||
from annotator.lama.saicinpainting.training.losses.perceptual import IMAGENET_STD, IMAGENET_MEAN
|
||||
|
||||
|
||||
def dummy_distance_weighter(real_img, pred_img, mask):
|
||||
return mask
|
||||
|
||||
|
||||
def get_gauss_kernel(kernel_size, width_factor=1):
|
||||
coords = torch.stack(torch.meshgrid(torch.arange(kernel_size),
|
||||
torch.arange(kernel_size)),
|
||||
dim=0).float()
|
||||
diff = torch.exp(-((coords - kernel_size // 2) ** 2).sum(0) / kernel_size / width_factor)
|
||||
diff /= diff.sum()
|
||||
return diff
|
||||
|
||||
|
||||
class BlurMask(nn.Module):
|
||||
def __init__(self, kernel_size=5, width_factor=1):
|
||||
super().__init__()
|
||||
self.filter = nn.Conv2d(1, 1, kernel_size, padding=kernel_size // 2, padding_mode='replicate', bias=False)
|
||||
self.filter.weight.data.copy_(get_gauss_kernel(kernel_size, width_factor=width_factor))
|
||||
|
||||
def forward(self, real_img, pred_img, mask):
|
||||
with torch.no_grad():
|
||||
result = self.filter(mask) * mask
|
||||
return result
|
||||
|
||||
|
||||
class EmulatedEDTMask(nn.Module):
|
||||
def __init__(self, dilate_kernel_size=5, blur_kernel_size=5, width_factor=1):
|
||||
super().__init__()
|
||||
self.dilate_filter = nn.Conv2d(1, 1, dilate_kernel_size, padding=dilate_kernel_size// 2, padding_mode='replicate',
|
||||
bias=False)
|
||||
self.dilate_filter.weight.data.copy_(torch.ones(1, 1, dilate_kernel_size, dilate_kernel_size, dtype=torch.float))
|
||||
self.blur_filter = nn.Conv2d(1, 1, blur_kernel_size, padding=blur_kernel_size // 2, padding_mode='replicate', bias=False)
|
||||
self.blur_filter.weight.data.copy_(get_gauss_kernel(blur_kernel_size, width_factor=width_factor))
|
||||
|
||||
def forward(self, real_img, pred_img, mask):
|
||||
with torch.no_grad():
|
||||
known_mask = 1 - mask
|
||||
dilated_known_mask = (self.dilate_filter(known_mask) > 1).float()
|
||||
result = self.blur_filter(1 - dilated_known_mask) * mask
|
||||
return result
|
||||
|
||||
|
||||
class PropagatePerceptualSim(nn.Module):
|
||||
def __init__(self, level=2, max_iters=10, temperature=500, erode_mask_size=3):
|
||||
super().__init__()
|
||||
vgg = torchvision.models.vgg19(pretrained=True).features
|
||||
vgg_avg_pooling = []
|
||||
|
||||
for weights in vgg.parameters():
|
||||
weights.requires_grad = False
|
||||
|
||||
cur_level_i = 0
|
||||
for module in vgg.modules():
|
||||
if module.__class__.__name__ == 'Sequential':
|
||||
continue
|
||||
elif module.__class__.__name__ == 'MaxPool2d':
|
||||
vgg_avg_pooling.append(nn.AvgPool2d(kernel_size=2, stride=2, padding=0))
|
||||
else:
|
||||
vgg_avg_pooling.append(module)
|
||||
if module.__class__.__name__ == 'ReLU':
|
||||
cur_level_i += 1
|
||||
if cur_level_i == level:
|
||||
break
|
||||
|
||||
self.features = nn.Sequential(*vgg_avg_pooling)
|
||||
|
||||
self.max_iters = max_iters
|
||||
self.temperature = temperature
|
||||
self.do_erode = erode_mask_size > 0
|
||||
if self.do_erode:
|
||||
self.erode_mask = nn.Conv2d(1, 1, erode_mask_size, padding=erode_mask_size // 2, bias=False)
|
||||
self.erode_mask.weight.data.fill_(1)
|
||||
|
||||
def forward(self, real_img, pred_img, mask):
|
||||
with torch.no_grad():
|
||||
real_img = (real_img - IMAGENET_MEAN.to(real_img)) / IMAGENET_STD.to(real_img)
|
||||
real_feats = self.features(real_img)
|
||||
|
||||
vertical_sim = torch.exp(-(real_feats[:, :, 1:] - real_feats[:, :, :-1]).pow(2).sum(1, keepdim=True)
|
||||
/ self.temperature)
|
||||
horizontal_sim = torch.exp(-(real_feats[:, :, :, 1:] - real_feats[:, :, :, :-1]).pow(2).sum(1, keepdim=True)
|
||||
/ self.temperature)
|
||||
|
||||
mask_scaled = F.interpolate(mask, size=real_feats.shape[-2:], mode='bilinear', align_corners=False)
|
||||
if self.do_erode:
|
||||
mask_scaled = (self.erode_mask(mask_scaled) > 1).float()
|
||||
|
||||
cur_knowness = 1 - mask_scaled
|
||||
|
||||
for iter_i in range(self.max_iters):
|
||||
new_top_knowness = F.pad(cur_knowness[:, :, :-1] * vertical_sim, (0, 0, 1, 0), mode='replicate')
|
||||
new_bottom_knowness = F.pad(cur_knowness[:, :, 1:] * vertical_sim, (0, 0, 0, 1), mode='replicate')
|
||||
|
||||
new_left_knowness = F.pad(cur_knowness[:, :, :, :-1] * horizontal_sim, (1, 0, 0, 0), mode='replicate')
|
||||
new_right_knowness = F.pad(cur_knowness[:, :, :, 1:] * horizontal_sim, (0, 1, 0, 0), mode='replicate')
|
||||
|
||||
new_knowness = torch.stack([new_top_knowness, new_bottom_knowness,
|
||||
new_left_knowness, new_right_knowness],
|
||||
dim=0).max(0).values
|
||||
|
||||
cur_knowness = torch.max(cur_knowness, new_knowness)
|
||||
|
||||
cur_knowness = F.interpolate(cur_knowness, size=mask.shape[-2:], mode='bilinear')
|
||||
result = torch.min(mask, 1 - cur_knowness)
|
||||
|
||||
return result
|
||||
|
||||
|
||||
def make_mask_distance_weighter(kind='none', **kwargs):
|
||||
if kind == 'none':
|
||||
return dummy_distance_weighter
|
||||
if kind == 'blur':
|
||||
return BlurMask(**kwargs)
|
||||
if kind == 'edt':
|
||||
return EmulatedEDTMask(**kwargs)
|
||||
if kind == 'pps':
|
||||
return PropagatePerceptualSim(**kwargs)
|
||||
raise ValueError(f'Unknown mask distance weighter kind {kind}')
|
||||
@@ -0,0 +1,33 @@
|
||||
from typing import List
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
|
||||
|
||||
def masked_l2_loss(pred, target, mask, weight_known, weight_missing):
|
||||
per_pixel_l2 = F.mse_loss(pred, target, reduction='none')
|
||||
pixel_weights = mask * weight_missing + (1 - mask) * weight_known
|
||||
return (pixel_weights * per_pixel_l2).mean()
|
||||
|
||||
|
||||
def masked_l1_loss(pred, target, mask, weight_known, weight_missing):
|
||||
per_pixel_l1 = F.l1_loss(pred, target, reduction='none')
|
||||
pixel_weights = mask * weight_missing + (1 - mask) * weight_known
|
||||
return (pixel_weights * per_pixel_l1).mean()
|
||||
|
||||
|
||||
def feature_matching_loss(fake_features: List[torch.Tensor], target_features: List[torch.Tensor], mask=None):
|
||||
if mask is None:
|
||||
res = torch.stack([F.mse_loss(fake_feat, target_feat)
|
||||
for fake_feat, target_feat in zip(fake_features, target_features)]).mean()
|
||||
else:
|
||||
res = 0
|
||||
norm = 0
|
||||
for fake_feat, target_feat in zip(fake_features, target_features):
|
||||
cur_mask = F.interpolate(mask, size=fake_feat.shape[-2:], mode='bilinear', align_corners=False)
|
||||
error_weights = 1 - cur_mask
|
||||
cur_val = ((fake_feat - target_feat).pow(2) * error_weights).mean()
|
||||
res = res + cur_val
|
||||
norm += 1
|
||||
res = res / norm
|
||||
return res
|
||||
@@ -0,0 +1,113 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
import torchvision
|
||||
|
||||
# from models.ade20k import ModelBuilder
|
||||
from annotator.lama.saicinpainting.utils import check_and_warn_input_range
|
||||
|
||||
|
||||
IMAGENET_MEAN = torch.FloatTensor([0.485, 0.456, 0.406])[None, :, None, None]
|
||||
IMAGENET_STD = torch.FloatTensor([0.229, 0.224, 0.225])[None, :, None, None]
|
||||
|
||||
|
||||
class PerceptualLoss(nn.Module):
|
||||
def __init__(self, normalize_inputs=True):
|
||||
super(PerceptualLoss, self).__init__()
|
||||
|
||||
self.normalize_inputs = normalize_inputs
|
||||
self.mean_ = IMAGENET_MEAN
|
||||
self.std_ = IMAGENET_STD
|
||||
|
||||
vgg = torchvision.models.vgg19(pretrained=True).features
|
||||
vgg_avg_pooling = []
|
||||
|
||||
for weights in vgg.parameters():
|
||||
weights.requires_grad = False
|
||||
|
||||
for module in vgg.modules():
|
||||
if module.__class__.__name__ == 'Sequential':
|
||||
continue
|
||||
elif module.__class__.__name__ == 'MaxPool2d':
|
||||
vgg_avg_pooling.append(nn.AvgPool2d(kernel_size=2, stride=2, padding=0))
|
||||
else:
|
||||
vgg_avg_pooling.append(module)
|
||||
|
||||
self.vgg = nn.Sequential(*vgg_avg_pooling)
|
||||
|
||||
def do_normalize_inputs(self, x):
|
||||
return (x - self.mean_.to(x.device)) / self.std_.to(x.device)
|
||||
|
||||
def partial_losses(self, input, target, mask=None):
|
||||
check_and_warn_input_range(target, 0, 1, 'PerceptualLoss target in partial_losses')
|
||||
|
||||
# we expect input and target to be in [0, 1] range
|
||||
losses = []
|
||||
|
||||
if self.normalize_inputs:
|
||||
features_input = self.do_normalize_inputs(input)
|
||||
features_target = self.do_normalize_inputs(target)
|
||||
else:
|
||||
features_input = input
|
||||
features_target = target
|
||||
|
||||
for layer in self.vgg[:30]:
|
||||
|
||||
features_input = layer(features_input)
|
||||
features_target = layer(features_target)
|
||||
|
||||
if layer.__class__.__name__ == 'ReLU':
|
||||
loss = F.mse_loss(features_input, features_target, reduction='none')
|
||||
|
||||
if mask is not None:
|
||||
cur_mask = F.interpolate(mask, size=features_input.shape[-2:],
|
||||
mode='bilinear', align_corners=False)
|
||||
loss = loss * (1 - cur_mask)
|
||||
|
||||
loss = loss.mean(dim=tuple(range(1, len(loss.shape))))
|
||||
losses.append(loss)
|
||||
|
||||
return losses
|
||||
|
||||
def forward(self, input, target, mask=None):
|
||||
losses = self.partial_losses(input, target, mask=mask)
|
||||
return torch.stack(losses).sum(dim=0)
|
||||
|
||||
def get_global_features(self, input):
|
||||
check_and_warn_input_range(input, 0, 1, 'PerceptualLoss input in get_global_features')
|
||||
|
||||
if self.normalize_inputs:
|
||||
features_input = self.do_normalize_inputs(input)
|
||||
else:
|
||||
features_input = input
|
||||
|
||||
features_input = self.vgg(features_input)
|
||||
return features_input
|
||||
|
||||
|
||||
class ResNetPL(nn.Module):
|
||||
def __init__(self, weight=1,
|
||||
weights_path=None, arch_encoder='resnet50dilated', segmentation=True):
|
||||
super().__init__()
|
||||
self.impl = ModelBuilder.get_encoder(weights_path=weights_path,
|
||||
arch_encoder=arch_encoder,
|
||||
arch_decoder='ppm_deepsup',
|
||||
fc_dim=2048,
|
||||
segmentation=segmentation)
|
||||
self.impl.eval()
|
||||
for w in self.impl.parameters():
|
||||
w.requires_grad_(False)
|
||||
|
||||
self.weight = weight
|
||||
|
||||
def forward(self, pred, target):
|
||||
pred = (pred - IMAGENET_MEAN.to(pred)) / IMAGENET_STD.to(pred)
|
||||
target = (target - IMAGENET_MEAN.to(target)) / IMAGENET_STD.to(target)
|
||||
|
||||
pred_feats = self.impl(pred, return_feature_maps=True)
|
||||
target_feats = self.impl(target, return_feature_maps=True)
|
||||
|
||||
result = torch.stack([F.mse_loss(cur_pred, cur_target)
|
||||
for cur_pred, cur_target
|
||||
in zip(pred_feats, target_feats)]).sum() * self.weight
|
||||
return result
|
||||
@@ -0,0 +1,43 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
|
||||
from .constants import weights as constant_weights
|
||||
|
||||
|
||||
class CrossEntropy2d(nn.Module):
|
||||
def __init__(self, reduction="mean", ignore_label=255, weights=None, *args, **kwargs):
|
||||
"""
|
||||
weight (Tensor, optional): a manual rescaling weight given to each class.
|
||||
If given, has to be a Tensor of size "nclasses"
|
||||
"""
|
||||
super(CrossEntropy2d, self).__init__()
|
||||
self.reduction = reduction
|
||||
self.ignore_label = ignore_label
|
||||
self.weights = weights
|
||||
if self.weights is not None:
|
||||
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
|
||||
self.weights = torch.FloatTensor(constant_weights[weights]).to(device)
|
||||
|
||||
def forward(self, predict, target):
|
||||
"""
|
||||
Args:
|
||||
predict:(n, c, h, w)
|
||||
target:(n, 1, h, w)
|
||||
"""
|
||||
target = target.long()
|
||||
assert not target.requires_grad
|
||||
assert predict.dim() == 4, "{0}".format(predict.size())
|
||||
assert target.dim() == 4, "{0}".format(target.size())
|
||||
assert predict.size(0) == target.size(0), "{0} vs {1} ".format(predict.size(0), target.size(0))
|
||||
assert target.size(1) == 1, "{0}".format(target.size(1))
|
||||
assert predict.size(2) == target.size(2), "{0} vs {1} ".format(predict.size(2), target.size(2))
|
||||
assert predict.size(3) == target.size(3), "{0} vs {1} ".format(predict.size(3), target.size(3))
|
||||
target = target.squeeze(1)
|
||||
n, c, h, w = predict.size()
|
||||
target_mask = (target >= 0) * (target != self.ignore_label)
|
||||
target = target[target_mask]
|
||||
predict = predict.transpose(1, 2).transpose(2, 3).contiguous()
|
||||
predict = predict[target_mask.view(n, h, w, 1).repeat(1, 1, 1, c)].view(-1, c)
|
||||
loss = F.cross_entropy(predict, target, weight=self.weights, reduction=self.reduction)
|
||||
return loss
|
||||
@@ -0,0 +1,155 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torchvision.models as models
|
||||
|
||||
|
||||
class PerceptualLoss(nn.Module):
|
||||
r"""
|
||||
Perceptual loss, VGG-based
|
||||
https://arxiv.org/abs/1603.08155
|
||||
https://github.com/dxyang/StyleTransfer/blob/master/utils.py
|
||||
"""
|
||||
|
||||
def __init__(self, weights=[1.0, 1.0, 1.0, 1.0, 1.0]):
|
||||
super(PerceptualLoss, self).__init__()
|
||||
self.add_module('vgg', VGG19())
|
||||
self.criterion = torch.nn.L1Loss()
|
||||
self.weights = weights
|
||||
|
||||
def __call__(self, x, y):
|
||||
# Compute features
|
||||
x_vgg, y_vgg = self.vgg(x), self.vgg(y)
|
||||
|
||||
content_loss = 0.0
|
||||
content_loss += self.weights[0] * self.criterion(x_vgg['relu1_1'], y_vgg['relu1_1'])
|
||||
content_loss += self.weights[1] * self.criterion(x_vgg['relu2_1'], y_vgg['relu2_1'])
|
||||
content_loss += self.weights[2] * self.criterion(x_vgg['relu3_1'], y_vgg['relu3_1'])
|
||||
content_loss += self.weights[3] * self.criterion(x_vgg['relu4_1'], y_vgg['relu4_1'])
|
||||
content_loss += self.weights[4] * self.criterion(x_vgg['relu5_1'], y_vgg['relu5_1'])
|
||||
|
||||
|
||||
return content_loss
|
||||
|
||||
|
||||
class VGG19(torch.nn.Module):
|
||||
def __init__(self):
|
||||
super(VGG19, self).__init__()
|
||||
features = models.vgg19(pretrained=True).features
|
||||
self.relu1_1 = torch.nn.Sequential()
|
||||
self.relu1_2 = torch.nn.Sequential()
|
||||
|
||||
self.relu2_1 = torch.nn.Sequential()
|
||||
self.relu2_2 = torch.nn.Sequential()
|
||||
|
||||
self.relu3_1 = torch.nn.Sequential()
|
||||
self.relu3_2 = torch.nn.Sequential()
|
||||
self.relu3_3 = torch.nn.Sequential()
|
||||
self.relu3_4 = torch.nn.Sequential()
|
||||
|
||||
self.relu4_1 = torch.nn.Sequential()
|
||||
self.relu4_2 = torch.nn.Sequential()
|
||||
self.relu4_3 = torch.nn.Sequential()
|
||||
self.relu4_4 = torch.nn.Sequential()
|
||||
|
||||
self.relu5_1 = torch.nn.Sequential()
|
||||
self.relu5_2 = torch.nn.Sequential()
|
||||
self.relu5_3 = torch.nn.Sequential()
|
||||
self.relu5_4 = torch.nn.Sequential()
|
||||
|
||||
for x in range(2):
|
||||
self.relu1_1.add_module(str(x), features[x])
|
||||
|
||||
for x in range(2, 4):
|
||||
self.relu1_2.add_module(str(x), features[x])
|
||||
|
||||
for x in range(4, 7):
|
||||
self.relu2_1.add_module(str(x), features[x])
|
||||
|
||||
for x in range(7, 9):
|
||||
self.relu2_2.add_module(str(x), features[x])
|
||||
|
||||
for x in range(9, 12):
|
||||
self.relu3_1.add_module(str(x), features[x])
|
||||
|
||||
for x in range(12, 14):
|
||||
self.relu3_2.add_module(str(x), features[x])
|
||||
|
||||
for x in range(14, 16):
|
||||
self.relu3_2.add_module(str(x), features[x])
|
||||
|
||||
for x in range(16, 18):
|
||||
self.relu3_4.add_module(str(x), features[x])
|
||||
|
||||
for x in range(18, 21):
|
||||
self.relu4_1.add_module(str(x), features[x])
|
||||
|
||||
for x in range(21, 23):
|
||||
self.relu4_2.add_module(str(x), features[x])
|
||||
|
||||
for x in range(23, 25):
|
||||
self.relu4_3.add_module(str(x), features[x])
|
||||
|
||||
for x in range(25, 27):
|
||||
self.relu4_4.add_module(str(x), features[x])
|
||||
|
||||
for x in range(27, 30):
|
||||
self.relu5_1.add_module(str(x), features[x])
|
||||
|
||||
for x in range(30, 32):
|
||||
self.relu5_2.add_module(str(x), features[x])
|
||||
|
||||
for x in range(32, 34):
|
||||
self.relu5_3.add_module(str(x), features[x])
|
||||
|
||||
for x in range(34, 36):
|
||||
self.relu5_4.add_module(str(x), features[x])
|
||||
|
||||
# don't need the gradients, just want the features
|
||||
for param in self.parameters():
|
||||
param.requires_grad = False
|
||||
|
||||
def forward(self, x):
|
||||
relu1_1 = self.relu1_1(x)
|
||||
relu1_2 = self.relu1_2(relu1_1)
|
||||
|
||||
relu2_1 = self.relu2_1(relu1_2)
|
||||
relu2_2 = self.relu2_2(relu2_1)
|
||||
|
||||
relu3_1 = self.relu3_1(relu2_2)
|
||||
relu3_2 = self.relu3_2(relu3_1)
|
||||
relu3_3 = self.relu3_3(relu3_2)
|
||||
relu3_4 = self.relu3_4(relu3_3)
|
||||
|
||||
relu4_1 = self.relu4_1(relu3_4)
|
||||
relu4_2 = self.relu4_2(relu4_1)
|
||||
relu4_3 = self.relu4_3(relu4_2)
|
||||
relu4_4 = self.relu4_4(relu4_3)
|
||||
|
||||
relu5_1 = self.relu5_1(relu4_4)
|
||||
relu5_2 = self.relu5_2(relu5_1)
|
||||
relu5_3 = self.relu5_3(relu5_2)
|
||||
relu5_4 = self.relu5_4(relu5_3)
|
||||
|
||||
out = {
|
||||
'relu1_1': relu1_1,
|
||||
'relu1_2': relu1_2,
|
||||
|
||||
'relu2_1': relu2_1,
|
||||
'relu2_2': relu2_2,
|
||||
|
||||
'relu3_1': relu3_1,
|
||||
'relu3_2': relu3_2,
|
||||
'relu3_3': relu3_3,
|
||||
'relu3_4': relu3_4,
|
||||
|
||||
'relu4_1': relu4_1,
|
||||
'relu4_2': relu4_2,
|
||||
'relu4_3': relu4_3,
|
||||
'relu4_4': relu4_4,
|
||||
|
||||
'relu5_1': relu5_1,
|
||||
'relu5_2': relu5_2,
|
||||
'relu5_3': relu5_3,
|
||||
'relu5_4': relu5_4,
|
||||
}
|
||||
return out
|
||||
@@ -0,0 +1,31 @@
|
||||
import logging
|
||||
|
||||
from annotator.lama.saicinpainting.training.modules.ffc import FFCResNetGenerator
|
||||
from annotator.lama.saicinpainting.training.modules.pix2pixhd import GlobalGenerator, MultiDilatedGlobalGenerator, \
|
||||
NLayerDiscriminator, MultidilatedNLayerDiscriminator
|
||||
|
||||
def make_generator(config, kind, **kwargs):
|
||||
logging.info(f'Make generator {kind}')
|
||||
|
||||
if kind == 'pix2pixhd_multidilated':
|
||||
return MultiDilatedGlobalGenerator(**kwargs)
|
||||
|
||||
if kind == 'pix2pixhd_global':
|
||||
return GlobalGenerator(**kwargs)
|
||||
|
||||
if kind == 'ffc_resnet':
|
||||
return FFCResNetGenerator(**kwargs)
|
||||
|
||||
raise ValueError(f'Unknown generator kind {kind}')
|
||||
|
||||
|
||||
def make_discriminator(kind, **kwargs):
|
||||
logging.info(f'Make discriminator {kind}')
|
||||
|
||||
if kind == 'pix2pixhd_nlayer_multidilated':
|
||||
return MultidilatedNLayerDiscriminator(**kwargs)
|
||||
|
||||
if kind == 'pix2pixhd_nlayer':
|
||||
return NLayerDiscriminator(**kwargs)
|
||||
|
||||
raise ValueError(f'Unknown discriminator kind {kind}')
|
||||
@@ -0,0 +1,80 @@
|
||||
import abc
|
||||
from typing import Tuple, List
|
||||
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
from annotator.lama.saicinpainting.training.modules.depthwise_sep_conv import DepthWiseSeperableConv
|
||||
from annotator.lama.saicinpainting.training.modules.multidilated_conv import MultidilatedConv
|
||||
|
||||
|
||||
class BaseDiscriminator(nn.Module):
|
||||
@abc.abstractmethod
|
||||
def forward(self, x: torch.Tensor) -> Tuple[torch.Tensor, List[torch.Tensor]]:
|
||||
"""
|
||||
Predict scores and get intermediate activations. Useful for feature matching loss
|
||||
:return tuple (scores, list of intermediate activations)
|
||||
"""
|
||||
raise NotImplemented()
|
||||
|
||||
|
||||
def get_conv_block_ctor(kind='default'):
|
||||
if not isinstance(kind, str):
|
||||
return kind
|
||||
if kind == 'default':
|
||||
return nn.Conv2d
|
||||
if kind == 'depthwise':
|
||||
return DepthWiseSeperableConv
|
||||
if kind == 'multidilated':
|
||||
return MultidilatedConv
|
||||
raise ValueError(f'Unknown convolutional block kind {kind}')
|
||||
|
||||
|
||||
def get_norm_layer(kind='bn'):
|
||||
if not isinstance(kind, str):
|
||||
return kind
|
||||
if kind == 'bn':
|
||||
return nn.BatchNorm2d
|
||||
if kind == 'in':
|
||||
return nn.InstanceNorm2d
|
||||
raise ValueError(f'Unknown norm block kind {kind}')
|
||||
|
||||
|
||||
def get_activation(kind='tanh'):
|
||||
if kind == 'tanh':
|
||||
return nn.Tanh()
|
||||
if kind == 'sigmoid':
|
||||
return nn.Sigmoid()
|
||||
if kind is False:
|
||||
return nn.Identity()
|
||||
raise ValueError(f'Unknown activation kind {kind}')
|
||||
|
||||
|
||||
class SimpleMultiStepGenerator(nn.Module):
|
||||
def __init__(self, steps: List[nn.Module]):
|
||||
super().__init__()
|
||||
self.steps = nn.ModuleList(steps)
|
||||
|
||||
def forward(self, x):
|
||||
cur_in = x
|
||||
outs = []
|
||||
for step in self.steps:
|
||||
cur_out = step(cur_in)
|
||||
outs.append(cur_out)
|
||||
cur_in = torch.cat((cur_in, cur_out), dim=1)
|
||||
return torch.cat(outs[::-1], dim=1)
|
||||
|
||||
def deconv_factory(kind, ngf, mult, norm_layer, activation, max_features):
|
||||
if kind == 'convtranspose':
|
||||
return [nn.ConvTranspose2d(min(max_features, ngf * mult),
|
||||
min(max_features, int(ngf * mult / 2)),
|
||||
kernel_size=3, stride=2, padding=1, output_padding=1),
|
||||
norm_layer(min(max_features, int(ngf * mult / 2))), activation]
|
||||
elif kind == 'bilinear':
|
||||
return [nn.Upsample(scale_factor=2, mode='bilinear'),
|
||||
DepthWiseSeperableConv(min(max_features, ngf * mult),
|
||||
min(max_features, int(ngf * mult / 2)),
|
||||
kernel_size=3, stride=1, padding=1),
|
||||
norm_layer(min(max_features, int(ngf * mult / 2))), activation]
|
||||
else:
|
||||
raise Exception(f"Invalid deconv kind: {kind}")
|
||||
@@ -0,0 +1,17 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
class DepthWiseSeperableConv(nn.Module):
|
||||
def __init__(self, in_dim, out_dim, *args, **kwargs):
|
||||
super().__init__()
|
||||
if 'groups' in kwargs:
|
||||
# ignoring groups for Depthwise Sep Conv
|
||||
del kwargs['groups']
|
||||
|
||||
self.depthwise = nn.Conv2d(in_dim, in_dim, *args, groups=in_dim, **kwargs)
|
||||
self.pointwise = nn.Conv2d(in_dim, out_dim, kernel_size=1)
|
||||
|
||||
def forward(self, x):
|
||||
out = self.depthwise(x)
|
||||
out = self.pointwise(out)
|
||||
return out
|
||||
@@ -0,0 +1,47 @@
|
||||
import torch
|
||||
from kornia import SamplePadding
|
||||
from kornia.augmentation import RandomAffine, CenterCrop
|
||||
|
||||
|
||||
class FakeFakesGenerator:
|
||||
def __init__(self, aug_proba=0.5, img_aug_degree=30, img_aug_translate=0.2):
|
||||
self.grad_aug = RandomAffine(degrees=360,
|
||||
translate=0.2,
|
||||
padding_mode=SamplePadding.REFLECTION,
|
||||
keepdim=False,
|
||||
p=1)
|
||||
self.img_aug = RandomAffine(degrees=img_aug_degree,
|
||||
translate=img_aug_translate,
|
||||
padding_mode=SamplePadding.REFLECTION,
|
||||
keepdim=True,
|
||||
p=1)
|
||||
self.aug_proba = aug_proba
|
||||
|
||||
def __call__(self, input_images, masks):
|
||||
blend_masks = self._fill_masks_with_gradient(masks)
|
||||
blend_target = self._make_blend_target(input_images)
|
||||
result = input_images * (1 - blend_masks) + blend_target * blend_masks
|
||||
return result, blend_masks
|
||||
|
||||
def _make_blend_target(self, input_images):
|
||||
batch_size = input_images.shape[0]
|
||||
permuted = input_images[torch.randperm(batch_size)]
|
||||
augmented = self.img_aug(input_images)
|
||||
is_aug = (torch.rand(batch_size, device=input_images.device)[:, None, None, None] < self.aug_proba).float()
|
||||
result = augmented * is_aug + permuted * (1 - is_aug)
|
||||
return result
|
||||
|
||||
def _fill_masks_with_gradient(self, masks):
|
||||
batch_size, _, height, width = masks.shape
|
||||
grad = torch.linspace(0, 1, steps=width * 2, device=masks.device, dtype=masks.dtype) \
|
||||
.view(1, 1, 1, -1).expand(batch_size, 1, height * 2, width * 2)
|
||||
grad = self.grad_aug(grad)
|
||||
grad = CenterCrop((height, width))(grad)
|
||||
grad *= masks
|
||||
|
||||
grad_for_min = grad + (1 - masks) * 10
|
||||
grad -= grad_for_min.view(batch_size, -1).min(-1).values[:, None, None, None]
|
||||
grad /= grad.view(batch_size, -1).max(-1).values[:, None, None, None] + 1e-6
|
||||
grad.clamp_(min=0, max=1)
|
||||
|
||||
return grad
|
||||
@@ -0,0 +1,485 @@
|
||||
# Fast Fourier Convolution NeurIPS 2020
|
||||
# original implementation https://github.com/pkumivision/FFC/blob/main/model_zoo/ffc.py
|
||||
# paper https://proceedings.neurips.cc/paper/2020/file/2fd5d41ec6cfab47e32164d5624269b1-Paper.pdf
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
|
||||
from annotator.lama.saicinpainting.training.modules.base import get_activation, BaseDiscriminator
|
||||
from annotator.lama.saicinpainting.training.modules.spatial_transform import LearnableSpatialTransformWrapper
|
||||
from annotator.lama.saicinpainting.training.modules.squeeze_excitation import SELayer
|
||||
from annotator.lama.saicinpainting.utils import get_shape
|
||||
|
||||
|
||||
class FFCSE_block(nn.Module):
|
||||
|
||||
def __init__(self, channels, ratio_g):
|
||||
super(FFCSE_block, self).__init__()
|
||||
in_cg = int(channels * ratio_g)
|
||||
in_cl = channels - in_cg
|
||||
r = 16
|
||||
|
||||
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
|
||||
self.conv1 = nn.Conv2d(channels, channels // r,
|
||||
kernel_size=1, bias=True)
|
||||
self.relu1 = nn.ReLU(inplace=True)
|
||||
self.conv_a2l = None if in_cl == 0 else nn.Conv2d(
|
||||
channels // r, in_cl, kernel_size=1, bias=True)
|
||||
self.conv_a2g = None if in_cg == 0 else nn.Conv2d(
|
||||
channels // r, in_cg, kernel_size=1, bias=True)
|
||||
self.sigmoid = nn.Sigmoid()
|
||||
|
||||
def forward(self, x):
|
||||
x = x if type(x) is tuple else (x, 0)
|
||||
id_l, id_g = x
|
||||
|
||||
x = id_l if type(id_g) is int else torch.cat([id_l, id_g], dim=1)
|
||||
x = self.avgpool(x)
|
||||
x = self.relu1(self.conv1(x))
|
||||
|
||||
x_l = 0 if self.conv_a2l is None else id_l * \
|
||||
self.sigmoid(self.conv_a2l(x))
|
||||
x_g = 0 if self.conv_a2g is None else id_g * \
|
||||
self.sigmoid(self.conv_a2g(x))
|
||||
return x_l, x_g
|
||||
|
||||
|
||||
class FourierUnit(nn.Module):
|
||||
|
||||
def __init__(self, in_channels, out_channels, groups=1, spatial_scale_factor=None, spatial_scale_mode='bilinear',
|
||||
spectral_pos_encoding=False, use_se=False, se_kwargs=None, ffc3d=False, fft_norm='ortho'):
|
||||
# bn_layer not used
|
||||
super(FourierUnit, self).__init__()
|
||||
self.groups = groups
|
||||
|
||||
self.conv_layer = torch.nn.Conv2d(in_channels=in_channels * 2 + (2 if spectral_pos_encoding else 0),
|
||||
out_channels=out_channels * 2,
|
||||
kernel_size=1, stride=1, padding=0, groups=self.groups, bias=False)
|
||||
self.bn = torch.nn.BatchNorm2d(out_channels * 2)
|
||||
self.relu = torch.nn.ReLU(inplace=True)
|
||||
|
||||
# squeeze and excitation block
|
||||
self.use_se = use_se
|
||||
if use_se:
|
||||
if se_kwargs is None:
|
||||
se_kwargs = {}
|
||||
self.se = SELayer(self.conv_layer.in_channels, **se_kwargs)
|
||||
|
||||
self.spatial_scale_factor = spatial_scale_factor
|
||||
self.spatial_scale_mode = spatial_scale_mode
|
||||
self.spectral_pos_encoding = spectral_pos_encoding
|
||||
self.ffc3d = ffc3d
|
||||
self.fft_norm = fft_norm
|
||||
|
||||
def forward(self, x):
|
||||
batch = x.shape[0]
|
||||
|
||||
if self.spatial_scale_factor is not None:
|
||||
orig_size = x.shape[-2:]
|
||||
x = F.interpolate(x, scale_factor=self.spatial_scale_factor, mode=self.spatial_scale_mode, align_corners=False)
|
||||
|
||||
r_size = x.size()
|
||||
# (batch, c, h, w/2+1, 2)
|
||||
fft_dim = (-3, -2, -1) if self.ffc3d else (-2, -1)
|
||||
ffted = torch.fft.rfftn(x, dim=fft_dim, norm=self.fft_norm)
|
||||
ffted = torch.stack((ffted.real, ffted.imag), dim=-1)
|
||||
ffted = ffted.permute(0, 1, 4, 2, 3).contiguous() # (batch, c, 2, h, w/2+1)
|
||||
ffted = ffted.view((batch, -1,) + ffted.size()[3:])
|
||||
|
||||
if self.spectral_pos_encoding:
|
||||
height, width = ffted.shape[-2:]
|
||||
coords_vert = torch.linspace(0, 1, height)[None, None, :, None].expand(batch, 1, height, width).to(ffted)
|
||||
coords_hor = torch.linspace(0, 1, width)[None, None, None, :].expand(batch, 1, height, width).to(ffted)
|
||||
ffted = torch.cat((coords_vert, coords_hor, ffted), dim=1)
|
||||
|
||||
if self.use_se:
|
||||
ffted = self.se(ffted)
|
||||
|
||||
ffted = self.conv_layer(ffted) # (batch, c*2, h, w/2+1)
|
||||
ffted = self.relu(self.bn(ffted))
|
||||
|
||||
ffted = ffted.view((batch, -1, 2,) + ffted.size()[2:]).permute(
|
||||
0, 1, 3, 4, 2).contiguous() # (batch,c, t, h, w/2+1, 2)
|
||||
ffted = torch.complex(ffted[..., 0], ffted[..., 1])
|
||||
|
||||
ifft_shape_slice = x.shape[-3:] if self.ffc3d else x.shape[-2:]
|
||||
output = torch.fft.irfftn(ffted, s=ifft_shape_slice, dim=fft_dim, norm=self.fft_norm)
|
||||
|
||||
if self.spatial_scale_factor is not None:
|
||||
output = F.interpolate(output, size=orig_size, mode=self.spatial_scale_mode, align_corners=False)
|
||||
|
||||
return output
|
||||
|
||||
|
||||
class SeparableFourierUnit(nn.Module):
|
||||
|
||||
def __init__(self, in_channels, out_channels, groups=1, kernel_size=3):
|
||||
# bn_layer not used
|
||||
super(SeparableFourierUnit, self).__init__()
|
||||
self.groups = groups
|
||||
row_out_channels = out_channels // 2
|
||||
col_out_channels = out_channels - row_out_channels
|
||||
self.row_conv = torch.nn.Conv2d(in_channels=in_channels * 2,
|
||||
out_channels=row_out_channels * 2,
|
||||
kernel_size=(kernel_size, 1), # kernel size is always like this, but the data will be transposed
|
||||
stride=1, padding=(kernel_size // 2, 0),
|
||||
padding_mode='reflect',
|
||||
groups=self.groups, bias=False)
|
||||
self.col_conv = torch.nn.Conv2d(in_channels=in_channels * 2,
|
||||
out_channels=col_out_channels * 2,
|
||||
kernel_size=(kernel_size, 1), # kernel size is always like this, but the data will be transposed
|
||||
stride=1, padding=(kernel_size // 2, 0),
|
||||
padding_mode='reflect',
|
||||
groups=self.groups, bias=False)
|
||||
self.row_bn = torch.nn.BatchNorm2d(row_out_channels * 2)
|
||||
self.col_bn = torch.nn.BatchNorm2d(col_out_channels * 2)
|
||||
self.relu = torch.nn.ReLU(inplace=True)
|
||||
|
||||
def process_branch(self, x, conv, bn):
|
||||
batch = x.shape[0]
|
||||
|
||||
r_size = x.size()
|
||||
# (batch, c, h, w/2+1, 2)
|
||||
ffted = torch.fft.rfft(x, norm="ortho")
|
||||
ffted = torch.stack((ffted.real, ffted.imag), dim=-1)
|
||||
ffted = ffted.permute(0, 1, 4, 2, 3).contiguous() # (batch, c, 2, h, w/2+1)
|
||||
ffted = ffted.view((batch, -1,) + ffted.size()[3:])
|
||||
|
||||
ffted = self.relu(bn(conv(ffted)))
|
||||
|
||||
ffted = ffted.view((batch, -1, 2,) + ffted.size()[2:]).permute(
|
||||
0, 1, 3, 4, 2).contiguous() # (batch,c, t, h, w/2+1, 2)
|
||||
ffted = torch.complex(ffted[..., 0], ffted[..., 1])
|
||||
|
||||
output = torch.fft.irfft(ffted, s=x.shape[-1:], norm="ortho")
|
||||
return output
|
||||
|
||||
|
||||
def forward(self, x):
|
||||
rowwise = self.process_branch(x, self.row_conv, self.row_bn)
|
||||
colwise = self.process_branch(x.permute(0, 1, 3, 2), self.col_conv, self.col_bn).permute(0, 1, 3, 2)
|
||||
out = torch.cat((rowwise, colwise), dim=1)
|
||||
return out
|
||||
|
||||
|
||||
class SpectralTransform(nn.Module):
|
||||
|
||||
def __init__(self, in_channels, out_channels, stride=1, groups=1, enable_lfu=True, separable_fu=False, **fu_kwargs):
|
||||
# bn_layer not used
|
||||
super(SpectralTransform, self).__init__()
|
||||
self.enable_lfu = enable_lfu
|
||||
if stride == 2:
|
||||
self.downsample = nn.AvgPool2d(kernel_size=(2, 2), stride=2)
|
||||
else:
|
||||
self.downsample = nn.Identity()
|
||||
|
||||
self.stride = stride
|
||||
self.conv1 = nn.Sequential(
|
||||
nn.Conv2d(in_channels, out_channels //
|
||||
2, kernel_size=1, groups=groups, bias=False),
|
||||
nn.BatchNorm2d(out_channels // 2),
|
||||
nn.ReLU(inplace=True)
|
||||
)
|
||||
fu_class = SeparableFourierUnit if separable_fu else FourierUnit
|
||||
self.fu = fu_class(
|
||||
out_channels // 2, out_channels // 2, groups, **fu_kwargs)
|
||||
if self.enable_lfu:
|
||||
self.lfu = fu_class(
|
||||
out_channels // 2, out_channels // 2, groups)
|
||||
self.conv2 = torch.nn.Conv2d(
|
||||
out_channels // 2, out_channels, kernel_size=1, groups=groups, bias=False)
|
||||
|
||||
def forward(self, x):
|
||||
|
||||
x = self.downsample(x)
|
||||
x = self.conv1(x)
|
||||
output = self.fu(x)
|
||||
|
||||
if self.enable_lfu:
|
||||
n, c, h, w = x.shape
|
||||
split_no = 2
|
||||
split_s = h // split_no
|
||||
xs = torch.cat(torch.split(
|
||||
x[:, :c // 4], split_s, dim=-2), dim=1).contiguous()
|
||||
xs = torch.cat(torch.split(xs, split_s, dim=-1),
|
||||
dim=1).contiguous()
|
||||
xs = self.lfu(xs)
|
||||
xs = xs.repeat(1, 1, split_no, split_no).contiguous()
|
||||
else:
|
||||
xs = 0
|
||||
|
||||
output = self.conv2(x + output + xs)
|
||||
|
||||
return output
|
||||
|
||||
|
||||
class FFC(nn.Module):
|
||||
|
||||
def __init__(self, in_channels, out_channels, kernel_size,
|
||||
ratio_gin, ratio_gout, stride=1, padding=0,
|
||||
dilation=1, groups=1, bias=False, enable_lfu=True,
|
||||
padding_type='reflect', gated=False, **spectral_kwargs):
|
||||
super(FFC, self).__init__()
|
||||
|
||||
assert stride == 1 or stride == 2, "Stride should be 1 or 2."
|
||||
self.stride = stride
|
||||
|
||||
in_cg = int(in_channels * ratio_gin)
|
||||
in_cl = in_channels - in_cg
|
||||
out_cg = int(out_channels * ratio_gout)
|
||||
out_cl = out_channels - out_cg
|
||||
#groups_g = 1 if groups == 1 else int(groups * ratio_gout)
|
||||
#groups_l = 1 if groups == 1 else groups - groups_g
|
||||
|
||||
self.ratio_gin = ratio_gin
|
||||
self.ratio_gout = ratio_gout
|
||||
self.global_in_num = in_cg
|
||||
|
||||
module = nn.Identity if in_cl == 0 or out_cl == 0 else nn.Conv2d
|
||||
self.convl2l = module(in_cl, out_cl, kernel_size,
|
||||
stride, padding, dilation, groups, bias, padding_mode=padding_type)
|
||||
module = nn.Identity if in_cl == 0 or out_cg == 0 else nn.Conv2d
|
||||
self.convl2g = module(in_cl, out_cg, kernel_size,
|
||||
stride, padding, dilation, groups, bias, padding_mode=padding_type)
|
||||
module = nn.Identity if in_cg == 0 or out_cl == 0 else nn.Conv2d
|
||||
self.convg2l = module(in_cg, out_cl, kernel_size,
|
||||
stride, padding, dilation, groups, bias, padding_mode=padding_type)
|
||||
module = nn.Identity if in_cg == 0 or out_cg == 0 else SpectralTransform
|
||||
self.convg2g = module(
|
||||
in_cg, out_cg, stride, 1 if groups == 1 else groups // 2, enable_lfu, **spectral_kwargs)
|
||||
|
||||
self.gated = gated
|
||||
module = nn.Identity if in_cg == 0 or out_cl == 0 or not self.gated else nn.Conv2d
|
||||
self.gate = module(in_channels, 2, 1)
|
||||
|
||||
def forward(self, x):
|
||||
x_l, x_g = x if type(x) is tuple else (x, 0)
|
||||
out_xl, out_xg = 0, 0
|
||||
|
||||
if self.gated:
|
||||
total_input_parts = [x_l]
|
||||
if torch.is_tensor(x_g):
|
||||
total_input_parts.append(x_g)
|
||||
total_input = torch.cat(total_input_parts, dim=1)
|
||||
|
||||
gates = torch.sigmoid(self.gate(total_input))
|
||||
g2l_gate, l2g_gate = gates.chunk(2, dim=1)
|
||||
else:
|
||||
g2l_gate, l2g_gate = 1, 1
|
||||
|
||||
if self.ratio_gout != 1:
|
||||
out_xl = self.convl2l(x_l) + self.convg2l(x_g) * g2l_gate
|
||||
if self.ratio_gout != 0:
|
||||
out_xg = self.convl2g(x_l) * l2g_gate + self.convg2g(x_g)
|
||||
|
||||
return out_xl, out_xg
|
||||
|
||||
|
||||
class FFC_BN_ACT(nn.Module):
|
||||
|
||||
def __init__(self, in_channels, out_channels,
|
||||
kernel_size, ratio_gin, ratio_gout,
|
||||
stride=1, padding=0, dilation=1, groups=1, bias=False,
|
||||
norm_layer=nn.BatchNorm2d, activation_layer=nn.Identity,
|
||||
padding_type='reflect',
|
||||
enable_lfu=True, **kwargs):
|
||||
super(FFC_BN_ACT, self).__init__()
|
||||
self.ffc = FFC(in_channels, out_channels, kernel_size,
|
||||
ratio_gin, ratio_gout, stride, padding, dilation,
|
||||
groups, bias, enable_lfu, padding_type=padding_type, **kwargs)
|
||||
lnorm = nn.Identity if ratio_gout == 1 else norm_layer
|
||||
gnorm = nn.Identity if ratio_gout == 0 else norm_layer
|
||||
global_channels = int(out_channels * ratio_gout)
|
||||
self.bn_l = lnorm(out_channels - global_channels)
|
||||
self.bn_g = gnorm(global_channels)
|
||||
|
||||
lact = nn.Identity if ratio_gout == 1 else activation_layer
|
||||
gact = nn.Identity if ratio_gout == 0 else activation_layer
|
||||
self.act_l = lact(inplace=True)
|
||||
self.act_g = gact(inplace=True)
|
||||
|
||||
def forward(self, x):
|
||||
x_l, x_g = self.ffc(x)
|
||||
x_l = self.act_l(self.bn_l(x_l))
|
||||
x_g = self.act_g(self.bn_g(x_g))
|
||||
return x_l, x_g
|
||||
|
||||
|
||||
class FFCResnetBlock(nn.Module):
|
||||
def __init__(self, dim, padding_type, norm_layer, activation_layer=nn.ReLU, dilation=1,
|
||||
spatial_transform_kwargs=None, inline=False, **conv_kwargs):
|
||||
super().__init__()
|
||||
self.conv1 = FFC_BN_ACT(dim, dim, kernel_size=3, padding=dilation, dilation=dilation,
|
||||
norm_layer=norm_layer,
|
||||
activation_layer=activation_layer,
|
||||
padding_type=padding_type,
|
||||
**conv_kwargs)
|
||||
self.conv2 = FFC_BN_ACT(dim, dim, kernel_size=3, padding=dilation, dilation=dilation,
|
||||
norm_layer=norm_layer,
|
||||
activation_layer=activation_layer,
|
||||
padding_type=padding_type,
|
||||
**conv_kwargs)
|
||||
if spatial_transform_kwargs is not None:
|
||||
self.conv1 = LearnableSpatialTransformWrapper(self.conv1, **spatial_transform_kwargs)
|
||||
self.conv2 = LearnableSpatialTransformWrapper(self.conv2, **spatial_transform_kwargs)
|
||||
self.inline = inline
|
||||
|
||||
def forward(self, x):
|
||||
if self.inline:
|
||||
x_l, x_g = x[:, :-self.conv1.ffc.global_in_num], x[:, -self.conv1.ffc.global_in_num:]
|
||||
else:
|
||||
x_l, x_g = x if type(x) is tuple else (x, 0)
|
||||
|
||||
id_l, id_g = x_l, x_g
|
||||
|
||||
x_l, x_g = self.conv1((x_l, x_g))
|
||||
x_l, x_g = self.conv2((x_l, x_g))
|
||||
|
||||
x_l, x_g = id_l + x_l, id_g + x_g
|
||||
out = x_l, x_g
|
||||
if self.inline:
|
||||
out = torch.cat(out, dim=1)
|
||||
return out
|
||||
|
||||
|
||||
class ConcatTupleLayer(nn.Module):
|
||||
def forward(self, x):
|
||||
assert isinstance(x, tuple)
|
||||
x_l, x_g = x
|
||||
assert torch.is_tensor(x_l) or torch.is_tensor(x_g)
|
||||
if not torch.is_tensor(x_g):
|
||||
return x_l
|
||||
return torch.cat(x, dim=1)
|
||||
|
||||
|
||||
class FFCResNetGenerator(nn.Module):
|
||||
def __init__(self, input_nc, output_nc, ngf=64, n_downsampling=3, n_blocks=9, norm_layer=nn.BatchNorm2d,
|
||||
padding_type='reflect', activation_layer=nn.ReLU,
|
||||
up_norm_layer=nn.BatchNorm2d, up_activation=nn.ReLU(True),
|
||||
init_conv_kwargs={}, downsample_conv_kwargs={}, resnet_conv_kwargs={},
|
||||
spatial_transform_layers=None, spatial_transform_kwargs={},
|
||||
add_out_act=True, max_features=1024, out_ffc=False, out_ffc_kwargs={}):
|
||||
assert (n_blocks >= 0)
|
||||
super().__init__()
|
||||
|
||||
model = [nn.ReflectionPad2d(3),
|
||||
FFC_BN_ACT(input_nc, ngf, kernel_size=7, padding=0, norm_layer=norm_layer,
|
||||
activation_layer=activation_layer, **init_conv_kwargs)]
|
||||
|
||||
### downsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** i
|
||||
if i == n_downsampling - 1:
|
||||
cur_conv_kwargs = dict(downsample_conv_kwargs)
|
||||
cur_conv_kwargs['ratio_gout'] = resnet_conv_kwargs.get('ratio_gin', 0)
|
||||
else:
|
||||
cur_conv_kwargs = downsample_conv_kwargs
|
||||
model += [FFC_BN_ACT(min(max_features, ngf * mult),
|
||||
min(max_features, ngf * mult * 2),
|
||||
kernel_size=3, stride=2, padding=1,
|
||||
norm_layer=norm_layer,
|
||||
activation_layer=activation_layer,
|
||||
**cur_conv_kwargs)]
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
feats_num_bottleneck = min(max_features, ngf * mult)
|
||||
|
||||
### resnet blocks
|
||||
for i in range(n_blocks):
|
||||
cur_resblock = FFCResnetBlock(feats_num_bottleneck, padding_type=padding_type, activation_layer=activation_layer,
|
||||
norm_layer=norm_layer, **resnet_conv_kwargs)
|
||||
if spatial_transform_layers is not None and i in spatial_transform_layers:
|
||||
cur_resblock = LearnableSpatialTransformWrapper(cur_resblock, **spatial_transform_kwargs)
|
||||
model += [cur_resblock]
|
||||
|
||||
model += [ConcatTupleLayer()]
|
||||
|
||||
### upsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** (n_downsampling - i)
|
||||
model += [nn.ConvTranspose2d(min(max_features, ngf * mult),
|
||||
min(max_features, int(ngf * mult / 2)),
|
||||
kernel_size=3, stride=2, padding=1, output_padding=1),
|
||||
up_norm_layer(min(max_features, int(ngf * mult / 2))),
|
||||
up_activation]
|
||||
|
||||
if out_ffc:
|
||||
model += [FFCResnetBlock(ngf, padding_type=padding_type, activation_layer=activation_layer,
|
||||
norm_layer=norm_layer, inline=True, **out_ffc_kwargs)]
|
||||
|
||||
model += [nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(ngf, output_nc, kernel_size=7, padding=0)]
|
||||
if add_out_act:
|
||||
model.append(get_activation('tanh' if add_out_act is True else add_out_act))
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, input):
|
||||
return self.model(input)
|
||||
|
||||
|
||||
class FFCNLayerDiscriminator(BaseDiscriminator):
|
||||
def __init__(self, input_nc, ndf=64, n_layers=3, norm_layer=nn.BatchNorm2d, max_features=512,
|
||||
init_conv_kwargs={}, conv_kwargs={}):
|
||||
super().__init__()
|
||||
self.n_layers = n_layers
|
||||
|
||||
def _act_ctor(inplace=True):
|
||||
return nn.LeakyReLU(negative_slope=0.2, inplace=inplace)
|
||||
|
||||
kw = 3
|
||||
padw = int(np.ceil((kw-1.0)/2))
|
||||
sequence = [[FFC_BN_ACT(input_nc, ndf, kernel_size=kw, padding=padw, norm_layer=norm_layer,
|
||||
activation_layer=_act_ctor, **init_conv_kwargs)]]
|
||||
|
||||
nf = ndf
|
||||
for n in range(1, n_layers):
|
||||
nf_prev = nf
|
||||
nf = min(nf * 2, max_features)
|
||||
|
||||
cur_model = [
|
||||
FFC_BN_ACT(nf_prev, nf,
|
||||
kernel_size=kw, stride=2, padding=padw,
|
||||
norm_layer=norm_layer,
|
||||
activation_layer=_act_ctor,
|
||||
**conv_kwargs)
|
||||
]
|
||||
sequence.append(cur_model)
|
||||
|
||||
nf_prev = nf
|
||||
nf = min(nf * 2, 512)
|
||||
|
||||
cur_model = [
|
||||
FFC_BN_ACT(nf_prev, nf,
|
||||
kernel_size=kw, stride=1, padding=padw,
|
||||
norm_layer=norm_layer,
|
||||
activation_layer=lambda *args, **kwargs: nn.LeakyReLU(*args, negative_slope=0.2, **kwargs),
|
||||
**conv_kwargs),
|
||||
ConcatTupleLayer()
|
||||
]
|
||||
sequence.append(cur_model)
|
||||
|
||||
sequence += [[nn.Conv2d(nf, 1, kernel_size=kw, stride=1, padding=padw)]]
|
||||
|
||||
for n in range(len(sequence)):
|
||||
setattr(self, 'model'+str(n), nn.Sequential(*sequence[n]))
|
||||
|
||||
def get_all_activations(self, x):
|
||||
res = [x]
|
||||
for n in range(self.n_layers + 2):
|
||||
model = getattr(self, 'model' + str(n))
|
||||
res.append(model(res[-1]))
|
||||
return res[1:]
|
||||
|
||||
def forward(self, x):
|
||||
act = self.get_all_activations(x)
|
||||
feats = []
|
||||
for out in act[:-1]:
|
||||
if isinstance(out, tuple):
|
||||
if torch.is_tensor(out[1]):
|
||||
out = torch.cat(out, dim=1)
|
||||
else:
|
||||
out = out[0]
|
||||
feats.append(out)
|
||||
return act[-1], feats
|
||||
@@ -0,0 +1,98 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import random
|
||||
from annotator.lama.saicinpainting.training.modules.depthwise_sep_conv import DepthWiseSeperableConv
|
||||
|
||||
class MultidilatedConv(nn.Module):
|
||||
def __init__(self, in_dim, out_dim, kernel_size, dilation_num=3, comb_mode='sum', equal_dim=True,
|
||||
shared_weights=False, padding=1, min_dilation=1, shuffle_in_channels=False, use_depthwise=False, **kwargs):
|
||||
super().__init__()
|
||||
convs = []
|
||||
self.equal_dim = equal_dim
|
||||
assert comb_mode in ('cat_out', 'sum', 'cat_in', 'cat_both'), comb_mode
|
||||
if comb_mode in ('cat_out', 'cat_both'):
|
||||
self.cat_out = True
|
||||
if equal_dim:
|
||||
assert out_dim % dilation_num == 0
|
||||
out_dims = [out_dim // dilation_num] * dilation_num
|
||||
self.index = sum([[i + j * (out_dims[0]) for j in range(dilation_num)] for i in range(out_dims[0])], [])
|
||||
else:
|
||||
out_dims = [out_dim // 2 ** (i + 1) for i in range(dilation_num - 1)]
|
||||
out_dims.append(out_dim - sum(out_dims))
|
||||
index = []
|
||||
starts = [0] + out_dims[:-1]
|
||||
lengths = [out_dims[i] // out_dims[-1] for i in range(dilation_num)]
|
||||
for i in range(out_dims[-1]):
|
||||
for j in range(dilation_num):
|
||||
index += list(range(starts[j], starts[j] + lengths[j]))
|
||||
starts[j] += lengths[j]
|
||||
self.index = index
|
||||
assert(len(index) == out_dim)
|
||||
self.out_dims = out_dims
|
||||
else:
|
||||
self.cat_out = False
|
||||
self.out_dims = [out_dim] * dilation_num
|
||||
|
||||
if comb_mode in ('cat_in', 'cat_both'):
|
||||
if equal_dim:
|
||||
assert in_dim % dilation_num == 0
|
||||
in_dims = [in_dim // dilation_num] * dilation_num
|
||||
else:
|
||||
in_dims = [in_dim // 2 ** (i + 1) for i in range(dilation_num - 1)]
|
||||
in_dims.append(in_dim - sum(in_dims))
|
||||
self.in_dims = in_dims
|
||||
self.cat_in = True
|
||||
else:
|
||||
self.cat_in = False
|
||||
self.in_dims = [in_dim] * dilation_num
|
||||
|
||||
conv_type = DepthWiseSeperableConv if use_depthwise else nn.Conv2d
|
||||
dilation = min_dilation
|
||||
for i in range(dilation_num):
|
||||
if isinstance(padding, int):
|
||||
cur_padding = padding * dilation
|
||||
else:
|
||||
cur_padding = padding[i]
|
||||
convs.append(conv_type(
|
||||
self.in_dims[i], self.out_dims[i], kernel_size, padding=cur_padding, dilation=dilation, **kwargs
|
||||
))
|
||||
if i > 0 and shared_weights:
|
||||
convs[-1].weight = convs[0].weight
|
||||
convs[-1].bias = convs[0].bias
|
||||
dilation *= 2
|
||||
self.convs = nn.ModuleList(convs)
|
||||
|
||||
self.shuffle_in_channels = shuffle_in_channels
|
||||
if self.shuffle_in_channels:
|
||||
# shuffle list as shuffling of tensors is nondeterministic
|
||||
in_channels_permute = list(range(in_dim))
|
||||
random.shuffle(in_channels_permute)
|
||||
# save as buffer so it is saved and loaded with checkpoint
|
||||
self.register_buffer('in_channels_permute', torch.tensor(in_channels_permute))
|
||||
|
||||
def forward(self, x):
|
||||
if self.shuffle_in_channels:
|
||||
x = x[:, self.in_channels_permute]
|
||||
|
||||
outs = []
|
||||
if self.cat_in:
|
||||
if self.equal_dim:
|
||||
x = x.chunk(len(self.convs), dim=1)
|
||||
else:
|
||||
new_x = []
|
||||
start = 0
|
||||
for dim in self.in_dims:
|
||||
new_x.append(x[:, start:start+dim])
|
||||
start += dim
|
||||
x = new_x
|
||||
for i, conv in enumerate(self.convs):
|
||||
if self.cat_in:
|
||||
input = x[i]
|
||||
else:
|
||||
input = x
|
||||
outs.append(conv(input))
|
||||
if self.cat_out:
|
||||
out = torch.cat(outs, dim=1)[:, self.index]
|
||||
else:
|
||||
out = sum(outs)
|
||||
return out
|
||||
@@ -0,0 +1,244 @@
|
||||
from typing import List, Tuple, Union, Optional
|
||||
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
|
||||
from annotator.lama.saicinpainting.training.modules.base import get_conv_block_ctor, get_activation
|
||||
from annotator.lama.saicinpainting.training.modules.pix2pixhd import ResnetBlock
|
||||
|
||||
|
||||
class ResNetHead(nn.Module):
|
||||
def __init__(self, input_nc, ngf=64, n_downsampling=3, n_blocks=9, norm_layer=nn.BatchNorm2d,
|
||||
padding_type='reflect', conv_kind='default', activation=nn.ReLU(True)):
|
||||
assert (n_blocks >= 0)
|
||||
super(ResNetHead, self).__init__()
|
||||
|
||||
conv_layer = get_conv_block_ctor(conv_kind)
|
||||
|
||||
model = [nn.ReflectionPad2d(3),
|
||||
conv_layer(input_nc, ngf, kernel_size=7, padding=0),
|
||||
norm_layer(ngf),
|
||||
activation]
|
||||
|
||||
### downsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** i
|
||||
model += [conv_layer(ngf * mult, ngf * mult * 2, kernel_size=3, stride=2, padding=1),
|
||||
norm_layer(ngf * mult * 2),
|
||||
activation]
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
|
||||
### resnet blocks
|
||||
for i in range(n_blocks):
|
||||
model += [ResnetBlock(ngf * mult, padding_type=padding_type, activation=activation, norm_layer=norm_layer,
|
||||
conv_kind=conv_kind)]
|
||||
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, input):
|
||||
return self.model(input)
|
||||
|
||||
|
||||
class ResNetTail(nn.Module):
|
||||
def __init__(self, output_nc, ngf=64, n_downsampling=3, n_blocks=9, norm_layer=nn.BatchNorm2d,
|
||||
padding_type='reflect', conv_kind='default', activation=nn.ReLU(True),
|
||||
up_norm_layer=nn.BatchNorm2d, up_activation=nn.ReLU(True), add_out_act=False, out_extra_layers_n=0,
|
||||
add_in_proj=None):
|
||||
assert (n_blocks >= 0)
|
||||
super(ResNetTail, self).__init__()
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
|
||||
model = []
|
||||
|
||||
if add_in_proj is not None:
|
||||
model.append(nn.Conv2d(add_in_proj, ngf * mult, kernel_size=1))
|
||||
|
||||
### resnet blocks
|
||||
for i in range(n_blocks):
|
||||
model += [ResnetBlock(ngf * mult, padding_type=padding_type, activation=activation, norm_layer=norm_layer,
|
||||
conv_kind=conv_kind)]
|
||||
|
||||
### upsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** (n_downsampling - i)
|
||||
model += [nn.ConvTranspose2d(ngf * mult, int(ngf * mult / 2), kernel_size=3, stride=2, padding=1,
|
||||
output_padding=1),
|
||||
up_norm_layer(int(ngf * mult / 2)),
|
||||
up_activation]
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
out_layers = []
|
||||
for _ in range(out_extra_layers_n):
|
||||
out_layers += [nn.Conv2d(ngf, ngf, kernel_size=1, padding=0),
|
||||
up_norm_layer(ngf),
|
||||
up_activation]
|
||||
out_layers += [nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(ngf, output_nc, kernel_size=7, padding=0)]
|
||||
|
||||
if add_out_act:
|
||||
out_layers.append(get_activation('tanh' if add_out_act is True else add_out_act))
|
||||
|
||||
self.out_proj = nn.Sequential(*out_layers)
|
||||
|
||||
def forward(self, input, return_last_act=False):
|
||||
features = self.model(input)
|
||||
out = self.out_proj(features)
|
||||
if return_last_act:
|
||||
return out, features
|
||||
else:
|
||||
return out
|
||||
|
||||
|
||||
class MultiscaleResNet(nn.Module):
|
||||
def __init__(self, input_nc, output_nc, ngf=64, n_downsampling=2, n_blocks_head=2, n_blocks_tail=6, n_scales=3,
|
||||
norm_layer=nn.BatchNorm2d, padding_type='reflect', conv_kind='default', activation=nn.ReLU(True),
|
||||
up_norm_layer=nn.BatchNorm2d, up_activation=nn.ReLU(True), add_out_act=False, out_extra_layers_n=0,
|
||||
out_cumulative=False, return_only_hr=False):
|
||||
super().__init__()
|
||||
|
||||
self.heads = nn.ModuleList([ResNetHead(input_nc, ngf=ngf, n_downsampling=n_downsampling,
|
||||
n_blocks=n_blocks_head, norm_layer=norm_layer, padding_type=padding_type,
|
||||
conv_kind=conv_kind, activation=activation)
|
||||
for i in range(n_scales)])
|
||||
tail_in_feats = ngf * (2 ** n_downsampling) + ngf
|
||||
self.tails = nn.ModuleList([ResNetTail(output_nc,
|
||||
ngf=ngf, n_downsampling=n_downsampling,
|
||||
n_blocks=n_blocks_tail, norm_layer=norm_layer, padding_type=padding_type,
|
||||
conv_kind=conv_kind, activation=activation, up_norm_layer=up_norm_layer,
|
||||
up_activation=up_activation, add_out_act=add_out_act,
|
||||
out_extra_layers_n=out_extra_layers_n,
|
||||
add_in_proj=None if (i == n_scales - 1) else tail_in_feats)
|
||||
for i in range(n_scales)])
|
||||
|
||||
self.out_cumulative = out_cumulative
|
||||
self.return_only_hr = return_only_hr
|
||||
|
||||
@property
|
||||
def num_scales(self):
|
||||
return len(self.heads)
|
||||
|
||||
def forward(self, ms_inputs: List[torch.Tensor], smallest_scales_num: Optional[int] = None) \
|
||||
-> Union[torch.Tensor, List[torch.Tensor]]:
|
||||
"""
|
||||
:param ms_inputs: List of inputs of different resolutions from HR to LR
|
||||
:param smallest_scales_num: int or None, number of smallest scales to take at input
|
||||
:return: Depending on return_only_hr:
|
||||
True: Only the most HR output
|
||||
False: List of outputs of different resolutions from HR to LR
|
||||
"""
|
||||
if smallest_scales_num is None:
|
||||
assert len(self.heads) == len(ms_inputs), (len(self.heads), len(ms_inputs), smallest_scales_num)
|
||||
smallest_scales_num = len(self.heads)
|
||||
else:
|
||||
assert smallest_scales_num == len(ms_inputs) <= len(self.heads), (len(self.heads), len(ms_inputs), smallest_scales_num)
|
||||
|
||||
cur_heads = self.heads[-smallest_scales_num:]
|
||||
ms_features = [cur_head(cur_inp) for cur_head, cur_inp in zip(cur_heads, ms_inputs)]
|
||||
|
||||
all_outputs = []
|
||||
prev_tail_features = None
|
||||
for i in range(len(ms_features)):
|
||||
scale_i = -i - 1
|
||||
|
||||
cur_tail_input = ms_features[-i - 1]
|
||||
if prev_tail_features is not None:
|
||||
if prev_tail_features.shape != cur_tail_input.shape:
|
||||
prev_tail_features = F.interpolate(prev_tail_features, size=cur_tail_input.shape[2:],
|
||||
mode='bilinear', align_corners=False)
|
||||
cur_tail_input = torch.cat((cur_tail_input, prev_tail_features), dim=1)
|
||||
|
||||
cur_out, cur_tail_feats = self.tails[scale_i](cur_tail_input, return_last_act=True)
|
||||
|
||||
prev_tail_features = cur_tail_feats
|
||||
all_outputs.append(cur_out)
|
||||
|
||||
if self.out_cumulative:
|
||||
all_outputs_cum = [all_outputs[0]]
|
||||
for i in range(1, len(ms_features)):
|
||||
cur_out = all_outputs[i]
|
||||
cur_out_cum = cur_out + F.interpolate(all_outputs_cum[-1], size=cur_out.shape[2:],
|
||||
mode='bilinear', align_corners=False)
|
||||
all_outputs_cum.append(cur_out_cum)
|
||||
all_outputs = all_outputs_cum
|
||||
|
||||
if self.return_only_hr:
|
||||
return all_outputs[-1]
|
||||
else:
|
||||
return all_outputs[::-1]
|
||||
|
||||
|
||||
class MultiscaleDiscriminatorSimple(nn.Module):
|
||||
def __init__(self, ms_impl):
|
||||
super().__init__()
|
||||
self.ms_impl = nn.ModuleList(ms_impl)
|
||||
|
||||
@property
|
||||
def num_scales(self):
|
||||
return len(self.ms_impl)
|
||||
|
||||
def forward(self, ms_inputs: List[torch.Tensor], smallest_scales_num: Optional[int] = None) \
|
||||
-> List[Tuple[torch.Tensor, List[torch.Tensor]]]:
|
||||
"""
|
||||
:param ms_inputs: List of inputs of different resolutions from HR to LR
|
||||
:param smallest_scales_num: int or None, number of smallest scales to take at input
|
||||
:return: List of pairs (prediction, features) for different resolutions from HR to LR
|
||||
"""
|
||||
if smallest_scales_num is None:
|
||||
assert len(self.ms_impl) == len(ms_inputs), (len(self.ms_impl), len(ms_inputs), smallest_scales_num)
|
||||
smallest_scales_num = len(self.heads)
|
||||
else:
|
||||
assert smallest_scales_num == len(ms_inputs) <= len(self.ms_impl), \
|
||||
(len(self.ms_impl), len(ms_inputs), smallest_scales_num)
|
||||
|
||||
return [cur_discr(cur_input) for cur_discr, cur_input in zip(self.ms_impl[-smallest_scales_num:], ms_inputs)]
|
||||
|
||||
|
||||
class SingleToMultiScaleInputMixin:
|
||||
def forward(self, x: torch.Tensor) -> List:
|
||||
orig_height, orig_width = x.shape[2:]
|
||||
factors = [2 ** i for i in range(self.num_scales)]
|
||||
ms_inputs = [F.interpolate(x, size=(orig_height // f, orig_width // f), mode='bilinear', align_corners=False)
|
||||
for f in factors]
|
||||
return super().forward(ms_inputs)
|
||||
|
||||
|
||||
class GeneratorMultiToSingleOutputMixin:
|
||||
def forward(self, x):
|
||||
return super().forward(x)[0]
|
||||
|
||||
|
||||
class DiscriminatorMultiToSingleOutputMixin:
|
||||
def forward(self, x):
|
||||
out_feat_tuples = super().forward(x)
|
||||
return out_feat_tuples[0][0], [f for _, flist in out_feat_tuples for f in flist]
|
||||
|
||||
|
||||
class DiscriminatorMultiToSingleOutputStackedMixin:
|
||||
def __init__(self, *args, return_feats_only_levels=None, **kwargs):
|
||||
super().__init__(*args, **kwargs)
|
||||
self.return_feats_only_levels = return_feats_only_levels
|
||||
|
||||
def forward(self, x):
|
||||
out_feat_tuples = super().forward(x)
|
||||
outs = [out for out, _ in out_feat_tuples]
|
||||
scaled_outs = [outs[0]] + [F.interpolate(cur_out, size=outs[0].shape[-2:],
|
||||
mode='bilinear', align_corners=False)
|
||||
for cur_out in outs[1:]]
|
||||
out = torch.cat(scaled_outs, dim=1)
|
||||
if self.return_feats_only_levels is not None:
|
||||
feat_lists = [out_feat_tuples[i][1] for i in self.return_feats_only_levels]
|
||||
else:
|
||||
feat_lists = [flist for _, flist in out_feat_tuples]
|
||||
feats = [f for flist in feat_lists for f in flist]
|
||||
return out, feats
|
||||
|
||||
|
||||
class MultiscaleDiscrSingleInput(SingleToMultiScaleInputMixin, DiscriminatorMultiToSingleOutputStackedMixin, MultiscaleDiscriminatorSimple):
|
||||
pass
|
||||
|
||||
|
||||
class MultiscaleResNetSingle(GeneratorMultiToSingleOutputMixin, SingleToMultiScaleInputMixin, MultiscaleResNet):
|
||||
pass
|
||||
@@ -0,0 +1,669 @@
|
||||
# original: https://github.com/NVIDIA/pix2pixHD/blob/master/models/networks.py
|
||||
import collections
|
||||
from functools import partial
|
||||
import functools
|
||||
import logging
|
||||
from collections import defaultdict
|
||||
|
||||
import numpy as np
|
||||
import torch.nn as nn
|
||||
|
||||
from annotator.lama.saicinpainting.training.modules.base import BaseDiscriminator, deconv_factory, get_conv_block_ctor, get_norm_layer, get_activation
|
||||
from annotator.lama.saicinpainting.training.modules.ffc import FFCResnetBlock
|
||||
from annotator.lama.saicinpainting.training.modules.multidilated_conv import MultidilatedConv
|
||||
|
||||
class DotDict(defaultdict):
|
||||
# https://stackoverflow.com/questions/2352181/how-to-use-a-dot-to-access-members-of-dictionary
|
||||
"""dot.notation access to dictionary attributes"""
|
||||
__getattr__ = defaultdict.get
|
||||
__setattr__ = defaultdict.__setitem__
|
||||
__delattr__ = defaultdict.__delitem__
|
||||
|
||||
class Identity(nn.Module):
|
||||
def __init__(self):
|
||||
super().__init__()
|
||||
|
||||
def forward(self, x):
|
||||
return x
|
||||
|
||||
|
||||
class ResnetBlock(nn.Module):
|
||||
def __init__(self, dim, padding_type, norm_layer, activation=nn.ReLU(True), use_dropout=False, conv_kind='default',
|
||||
dilation=1, in_dim=None, groups=1, second_dilation=None):
|
||||
super(ResnetBlock, self).__init__()
|
||||
self.in_dim = in_dim
|
||||
self.dim = dim
|
||||
if second_dilation is None:
|
||||
second_dilation = dilation
|
||||
self.conv_block = self.build_conv_block(dim, padding_type, norm_layer, activation, use_dropout,
|
||||
conv_kind=conv_kind, dilation=dilation, in_dim=in_dim, groups=groups,
|
||||
second_dilation=second_dilation)
|
||||
|
||||
if self.in_dim is not None:
|
||||
self.input_conv = nn.Conv2d(in_dim, dim, 1)
|
||||
|
||||
self.out_channnels = dim
|
||||
|
||||
def build_conv_block(self, dim, padding_type, norm_layer, activation, use_dropout, conv_kind='default',
|
||||
dilation=1, in_dim=None, groups=1, second_dilation=1):
|
||||
conv_layer = get_conv_block_ctor(conv_kind)
|
||||
|
||||
conv_block = []
|
||||
p = 0
|
||||
if padding_type == 'reflect':
|
||||
conv_block += [nn.ReflectionPad2d(dilation)]
|
||||
elif padding_type == 'replicate':
|
||||
conv_block += [nn.ReplicationPad2d(dilation)]
|
||||
elif padding_type == 'zero':
|
||||
p = dilation
|
||||
else:
|
||||
raise NotImplementedError('padding [%s] is not implemented' % padding_type)
|
||||
|
||||
if in_dim is None:
|
||||
in_dim = dim
|
||||
|
||||
conv_block += [conv_layer(in_dim, dim, kernel_size=3, padding=p, dilation=dilation),
|
||||
norm_layer(dim),
|
||||
activation]
|
||||
if use_dropout:
|
||||
conv_block += [nn.Dropout(0.5)]
|
||||
|
||||
p = 0
|
||||
if padding_type == 'reflect':
|
||||
conv_block += [nn.ReflectionPad2d(second_dilation)]
|
||||
elif padding_type == 'replicate':
|
||||
conv_block += [nn.ReplicationPad2d(second_dilation)]
|
||||
elif padding_type == 'zero':
|
||||
p = second_dilation
|
||||
else:
|
||||
raise NotImplementedError('padding [%s] is not implemented' % padding_type)
|
||||
conv_block += [conv_layer(dim, dim, kernel_size=3, padding=p, dilation=second_dilation, groups=groups),
|
||||
norm_layer(dim)]
|
||||
|
||||
return nn.Sequential(*conv_block)
|
||||
|
||||
def forward(self, x):
|
||||
x_before = x
|
||||
if self.in_dim is not None:
|
||||
x = self.input_conv(x)
|
||||
out = x + self.conv_block(x_before)
|
||||
return out
|
||||
|
||||
class ResnetBlock5x5(nn.Module):
|
||||
def __init__(self, dim, padding_type, norm_layer, activation=nn.ReLU(True), use_dropout=False, conv_kind='default',
|
||||
dilation=1, in_dim=None, groups=1, second_dilation=None):
|
||||
super(ResnetBlock5x5, self).__init__()
|
||||
self.in_dim = in_dim
|
||||
self.dim = dim
|
||||
if second_dilation is None:
|
||||
second_dilation = dilation
|
||||
self.conv_block = self.build_conv_block(dim, padding_type, norm_layer, activation, use_dropout,
|
||||
conv_kind=conv_kind, dilation=dilation, in_dim=in_dim, groups=groups,
|
||||
second_dilation=second_dilation)
|
||||
|
||||
if self.in_dim is not None:
|
||||
self.input_conv = nn.Conv2d(in_dim, dim, 1)
|
||||
|
||||
self.out_channnels = dim
|
||||
|
||||
def build_conv_block(self, dim, padding_type, norm_layer, activation, use_dropout, conv_kind='default',
|
||||
dilation=1, in_dim=None, groups=1, second_dilation=1):
|
||||
conv_layer = get_conv_block_ctor(conv_kind)
|
||||
|
||||
conv_block = []
|
||||
p = 0
|
||||
if padding_type == 'reflect':
|
||||
conv_block += [nn.ReflectionPad2d(dilation * 2)]
|
||||
elif padding_type == 'replicate':
|
||||
conv_block += [nn.ReplicationPad2d(dilation * 2)]
|
||||
elif padding_type == 'zero':
|
||||
p = dilation * 2
|
||||
else:
|
||||
raise NotImplementedError('padding [%s] is not implemented' % padding_type)
|
||||
|
||||
if in_dim is None:
|
||||
in_dim = dim
|
||||
|
||||
conv_block += [conv_layer(in_dim, dim, kernel_size=5, padding=p, dilation=dilation),
|
||||
norm_layer(dim),
|
||||
activation]
|
||||
if use_dropout:
|
||||
conv_block += [nn.Dropout(0.5)]
|
||||
|
||||
p = 0
|
||||
if padding_type == 'reflect':
|
||||
conv_block += [nn.ReflectionPad2d(second_dilation * 2)]
|
||||
elif padding_type == 'replicate':
|
||||
conv_block += [nn.ReplicationPad2d(second_dilation * 2)]
|
||||
elif padding_type == 'zero':
|
||||
p = second_dilation * 2
|
||||
else:
|
||||
raise NotImplementedError('padding [%s] is not implemented' % padding_type)
|
||||
conv_block += [conv_layer(dim, dim, kernel_size=5, padding=p, dilation=second_dilation, groups=groups),
|
||||
norm_layer(dim)]
|
||||
|
||||
return nn.Sequential(*conv_block)
|
||||
|
||||
def forward(self, x):
|
||||
x_before = x
|
||||
if self.in_dim is not None:
|
||||
x = self.input_conv(x)
|
||||
out = x + self.conv_block(x_before)
|
||||
return out
|
||||
|
||||
|
||||
class MultidilatedResnetBlock(nn.Module):
|
||||
def __init__(self, dim, padding_type, conv_layer, norm_layer, activation=nn.ReLU(True), use_dropout=False):
|
||||
super().__init__()
|
||||
self.conv_block = self.build_conv_block(dim, padding_type, conv_layer, norm_layer, activation, use_dropout)
|
||||
|
||||
def build_conv_block(self, dim, padding_type, conv_layer, norm_layer, activation, use_dropout, dilation=1):
|
||||
conv_block = []
|
||||
conv_block += [conv_layer(dim, dim, kernel_size=3, padding_mode=padding_type),
|
||||
norm_layer(dim),
|
||||
activation]
|
||||
if use_dropout:
|
||||
conv_block += [nn.Dropout(0.5)]
|
||||
|
||||
conv_block += [conv_layer(dim, dim, kernel_size=3, padding_mode=padding_type),
|
||||
norm_layer(dim)]
|
||||
|
||||
return nn.Sequential(*conv_block)
|
||||
|
||||
def forward(self, x):
|
||||
out = x + self.conv_block(x)
|
||||
return out
|
||||
|
||||
|
||||
class MultiDilatedGlobalGenerator(nn.Module):
|
||||
def __init__(self, input_nc, output_nc, ngf=64, n_downsampling=3,
|
||||
n_blocks=3, norm_layer=nn.BatchNorm2d,
|
||||
padding_type='reflect', conv_kind='default',
|
||||
deconv_kind='convtranspose', activation=nn.ReLU(True),
|
||||
up_norm_layer=nn.BatchNorm2d, affine=None, up_activation=nn.ReLU(True),
|
||||
add_out_act=True, max_features=1024, multidilation_kwargs={},
|
||||
ffc_positions=None, ffc_kwargs={}):
|
||||
assert (n_blocks >= 0)
|
||||
super().__init__()
|
||||
|
||||
conv_layer = get_conv_block_ctor(conv_kind)
|
||||
resnet_conv_layer = functools.partial(get_conv_block_ctor('multidilated'), **multidilation_kwargs)
|
||||
norm_layer = get_norm_layer(norm_layer)
|
||||
if affine is not None:
|
||||
norm_layer = partial(norm_layer, affine=affine)
|
||||
up_norm_layer = get_norm_layer(up_norm_layer)
|
||||
if affine is not None:
|
||||
up_norm_layer = partial(up_norm_layer, affine=affine)
|
||||
|
||||
model = [nn.ReflectionPad2d(3),
|
||||
conv_layer(input_nc, ngf, kernel_size=7, padding=0),
|
||||
norm_layer(ngf),
|
||||
activation]
|
||||
|
||||
identity = Identity()
|
||||
### downsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** i
|
||||
|
||||
model += [conv_layer(min(max_features, ngf * mult),
|
||||
min(max_features, ngf * mult * 2),
|
||||
kernel_size=3, stride=2, padding=1),
|
||||
norm_layer(min(max_features, ngf * mult * 2)),
|
||||
activation]
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
feats_num_bottleneck = min(max_features, ngf * mult)
|
||||
|
||||
### resnet blocks
|
||||
for i in range(n_blocks):
|
||||
if ffc_positions is not None and i in ffc_positions:
|
||||
model += [FFCResnetBlock(feats_num_bottleneck, padding_type, norm_layer, activation_layer=nn.ReLU,
|
||||
inline=True, **ffc_kwargs)]
|
||||
model += [MultidilatedResnetBlock(feats_num_bottleneck, padding_type=padding_type,
|
||||
conv_layer=resnet_conv_layer, activation=activation,
|
||||
norm_layer=norm_layer)]
|
||||
|
||||
### upsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** (n_downsampling - i)
|
||||
model += deconv_factory(deconv_kind, ngf, mult, up_norm_layer, up_activation, max_features)
|
||||
model += [nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(ngf, output_nc, kernel_size=7, padding=0)]
|
||||
if add_out_act:
|
||||
model.append(get_activation('tanh' if add_out_act is True else add_out_act))
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, input):
|
||||
return self.model(input)
|
||||
|
||||
class ConfigGlobalGenerator(nn.Module):
|
||||
def __init__(self, input_nc, output_nc, ngf=64, n_downsampling=3,
|
||||
n_blocks=3, norm_layer=nn.BatchNorm2d,
|
||||
padding_type='reflect', conv_kind='default',
|
||||
deconv_kind='convtranspose', activation=nn.ReLU(True),
|
||||
up_norm_layer=nn.BatchNorm2d, affine=None, up_activation=nn.ReLU(True),
|
||||
add_out_act=True, max_features=1024,
|
||||
manual_block_spec=[],
|
||||
resnet_block_kind='multidilatedresnetblock',
|
||||
resnet_conv_kind='multidilated',
|
||||
resnet_dilation=1,
|
||||
multidilation_kwargs={}):
|
||||
assert (n_blocks >= 0)
|
||||
super().__init__()
|
||||
|
||||
conv_layer = get_conv_block_ctor(conv_kind)
|
||||
resnet_conv_layer = functools.partial(get_conv_block_ctor(resnet_conv_kind), **multidilation_kwargs)
|
||||
norm_layer = get_norm_layer(norm_layer)
|
||||
if affine is not None:
|
||||
norm_layer = partial(norm_layer, affine=affine)
|
||||
up_norm_layer = get_norm_layer(up_norm_layer)
|
||||
if affine is not None:
|
||||
up_norm_layer = partial(up_norm_layer, affine=affine)
|
||||
|
||||
model = [nn.ReflectionPad2d(3),
|
||||
conv_layer(input_nc, ngf, kernel_size=7, padding=0),
|
||||
norm_layer(ngf),
|
||||
activation]
|
||||
|
||||
identity = Identity()
|
||||
|
||||
### downsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** i
|
||||
model += [conv_layer(min(max_features, ngf * mult),
|
||||
min(max_features, ngf * mult * 2),
|
||||
kernel_size=3, stride=2, padding=1),
|
||||
norm_layer(min(max_features, ngf * mult * 2)),
|
||||
activation]
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
feats_num_bottleneck = min(max_features, ngf * mult)
|
||||
|
||||
if len(manual_block_spec) == 0:
|
||||
manual_block_spec = [
|
||||
DotDict(lambda : None, {
|
||||
'n_blocks': n_blocks,
|
||||
'use_default': True})
|
||||
]
|
||||
|
||||
### resnet blocks
|
||||
for block_spec in manual_block_spec:
|
||||
def make_and_add_blocks(model, block_spec):
|
||||
block_spec = DotDict(lambda : None, block_spec)
|
||||
if not block_spec.use_default:
|
||||
resnet_conv_layer = functools.partial(get_conv_block_ctor(block_spec.resnet_conv_kind), **block_spec.multidilation_kwargs)
|
||||
resnet_conv_kind = block_spec.resnet_conv_kind
|
||||
resnet_block_kind = block_spec.resnet_block_kind
|
||||
if block_spec.resnet_dilation is not None:
|
||||
resnet_dilation = block_spec.resnet_dilation
|
||||
for i in range(block_spec.n_blocks):
|
||||
if resnet_block_kind == "multidilatedresnetblock":
|
||||
model += [MultidilatedResnetBlock(feats_num_bottleneck, padding_type=padding_type,
|
||||
conv_layer=resnet_conv_layer, activation=activation,
|
||||
norm_layer=norm_layer)]
|
||||
if resnet_block_kind == "resnetblock":
|
||||
model += [ResnetBlock(ngf * mult, padding_type=padding_type, activation=activation, norm_layer=norm_layer,
|
||||
conv_kind=resnet_conv_kind)]
|
||||
if resnet_block_kind == "resnetblock5x5":
|
||||
model += [ResnetBlock5x5(ngf * mult, padding_type=padding_type, activation=activation, norm_layer=norm_layer,
|
||||
conv_kind=resnet_conv_kind)]
|
||||
if resnet_block_kind == "resnetblockdwdil":
|
||||
model += [ResnetBlock(ngf * mult, padding_type=padding_type, activation=activation, norm_layer=norm_layer,
|
||||
conv_kind=resnet_conv_kind, dilation=resnet_dilation, second_dilation=resnet_dilation)]
|
||||
make_and_add_blocks(model, block_spec)
|
||||
|
||||
### upsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** (n_downsampling - i)
|
||||
model += deconv_factory(deconv_kind, ngf, mult, up_norm_layer, up_activation, max_features)
|
||||
model += [nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(ngf, output_nc, kernel_size=7, padding=0)]
|
||||
if add_out_act:
|
||||
model.append(get_activation('tanh' if add_out_act is True else add_out_act))
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, input):
|
||||
return self.model(input)
|
||||
|
||||
|
||||
def make_dil_blocks(dilated_blocks_n, dilation_block_kind, dilated_block_kwargs):
|
||||
blocks = []
|
||||
for i in range(dilated_blocks_n):
|
||||
if dilation_block_kind == 'simple':
|
||||
blocks.append(ResnetBlock(**dilated_block_kwargs, dilation=2 ** (i + 1)))
|
||||
elif dilation_block_kind == 'multi':
|
||||
blocks.append(MultidilatedResnetBlock(**dilated_block_kwargs))
|
||||
else:
|
||||
raise ValueError(f'dilation_block_kind could not be "{dilation_block_kind}"')
|
||||
return blocks
|
||||
|
||||
|
||||
class GlobalGenerator(nn.Module):
|
||||
def __init__(self, input_nc, output_nc, ngf=64, n_downsampling=3, n_blocks=9, norm_layer=nn.BatchNorm2d,
|
||||
padding_type='reflect', conv_kind='default', activation=nn.ReLU(True),
|
||||
up_norm_layer=nn.BatchNorm2d, affine=None,
|
||||
up_activation=nn.ReLU(True), dilated_blocks_n=0, dilated_blocks_n_start=0,
|
||||
dilated_blocks_n_middle=0,
|
||||
add_out_act=True,
|
||||
max_features=1024, is_resblock_depthwise=False,
|
||||
ffc_positions=None, ffc_kwargs={}, dilation=1, second_dilation=None,
|
||||
dilation_block_kind='simple', multidilation_kwargs={}):
|
||||
assert (n_blocks >= 0)
|
||||
super().__init__()
|
||||
|
||||
conv_layer = get_conv_block_ctor(conv_kind)
|
||||
norm_layer = get_norm_layer(norm_layer)
|
||||
if affine is not None:
|
||||
norm_layer = partial(norm_layer, affine=affine)
|
||||
up_norm_layer = get_norm_layer(up_norm_layer)
|
||||
if affine is not None:
|
||||
up_norm_layer = partial(up_norm_layer, affine=affine)
|
||||
|
||||
if ffc_positions is not None:
|
||||
ffc_positions = collections.Counter(ffc_positions)
|
||||
|
||||
model = [nn.ReflectionPad2d(3),
|
||||
conv_layer(input_nc, ngf, kernel_size=7, padding=0),
|
||||
norm_layer(ngf),
|
||||
activation]
|
||||
|
||||
identity = Identity()
|
||||
### downsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** i
|
||||
|
||||
model += [conv_layer(min(max_features, ngf * mult),
|
||||
min(max_features, ngf * mult * 2),
|
||||
kernel_size=3, stride=2, padding=1),
|
||||
norm_layer(min(max_features, ngf * mult * 2)),
|
||||
activation]
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
feats_num_bottleneck = min(max_features, ngf * mult)
|
||||
|
||||
dilated_block_kwargs = dict(dim=feats_num_bottleneck, padding_type=padding_type,
|
||||
activation=activation, norm_layer=norm_layer)
|
||||
if dilation_block_kind == 'simple':
|
||||
dilated_block_kwargs['conv_kind'] = conv_kind
|
||||
elif dilation_block_kind == 'multi':
|
||||
dilated_block_kwargs['conv_layer'] = functools.partial(
|
||||
get_conv_block_ctor('multidilated'), **multidilation_kwargs)
|
||||
|
||||
# dilated blocks at the start of the bottleneck sausage
|
||||
if dilated_blocks_n_start is not None and dilated_blocks_n_start > 0:
|
||||
model += make_dil_blocks(dilated_blocks_n_start, dilation_block_kind, dilated_block_kwargs)
|
||||
|
||||
# resnet blocks
|
||||
for i in range(n_blocks):
|
||||
# dilated blocks at the middle of the bottleneck sausage
|
||||
if i == n_blocks // 2 and dilated_blocks_n_middle is not None and dilated_blocks_n_middle > 0:
|
||||
model += make_dil_blocks(dilated_blocks_n_middle, dilation_block_kind, dilated_block_kwargs)
|
||||
|
||||
if ffc_positions is not None and i in ffc_positions:
|
||||
for _ in range(ffc_positions[i]): # same position can occur more than once
|
||||
model += [FFCResnetBlock(feats_num_bottleneck, padding_type, norm_layer, activation_layer=nn.ReLU,
|
||||
inline=True, **ffc_kwargs)]
|
||||
|
||||
if is_resblock_depthwise:
|
||||
resblock_groups = feats_num_bottleneck
|
||||
else:
|
||||
resblock_groups = 1
|
||||
|
||||
model += [ResnetBlock(feats_num_bottleneck, padding_type=padding_type, activation=activation,
|
||||
norm_layer=norm_layer, conv_kind=conv_kind, groups=resblock_groups,
|
||||
dilation=dilation, second_dilation=second_dilation)]
|
||||
|
||||
|
||||
# dilated blocks at the end of the bottleneck sausage
|
||||
if dilated_blocks_n is not None and dilated_blocks_n > 0:
|
||||
model += make_dil_blocks(dilated_blocks_n, dilation_block_kind, dilated_block_kwargs)
|
||||
|
||||
# upsample
|
||||
for i in range(n_downsampling):
|
||||
mult = 2 ** (n_downsampling - i)
|
||||
model += [nn.ConvTranspose2d(min(max_features, ngf * mult),
|
||||
min(max_features, int(ngf * mult / 2)),
|
||||
kernel_size=3, stride=2, padding=1, output_padding=1),
|
||||
up_norm_layer(min(max_features, int(ngf * mult / 2))),
|
||||
up_activation]
|
||||
model += [nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(ngf, output_nc, kernel_size=7, padding=0)]
|
||||
if add_out_act:
|
||||
model.append(get_activation('tanh' if add_out_act is True else add_out_act))
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, input):
|
||||
return self.model(input)
|
||||
|
||||
|
||||
class GlobalGeneratorGated(GlobalGenerator):
|
||||
def __init__(self, *args, **kwargs):
|
||||
real_kwargs=dict(
|
||||
conv_kind='gated_bn_relu',
|
||||
activation=nn.Identity(),
|
||||
norm_layer=nn.Identity
|
||||
)
|
||||
real_kwargs.update(kwargs)
|
||||
super().__init__(*args, **real_kwargs)
|
||||
|
||||
|
||||
class GlobalGeneratorFromSuperChannels(nn.Module):
|
||||
def __init__(self, input_nc, output_nc, n_downsampling, n_blocks, super_channels, norm_layer="bn", padding_type='reflect', add_out_act=True):
|
||||
super().__init__()
|
||||
self.n_downsampling = n_downsampling
|
||||
norm_layer = get_norm_layer(norm_layer)
|
||||
if type(norm_layer) == functools.partial:
|
||||
use_bias = (norm_layer.func == nn.InstanceNorm2d)
|
||||
else:
|
||||
use_bias = (norm_layer == nn.InstanceNorm2d)
|
||||
|
||||
channels = self.convert_super_channels(super_channels)
|
||||
self.channels = channels
|
||||
|
||||
model = [nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(input_nc, channels[0], kernel_size=7, padding=0, bias=use_bias),
|
||||
norm_layer(channels[0]),
|
||||
nn.ReLU(True)]
|
||||
|
||||
for i in range(n_downsampling): # add downsampling layers
|
||||
mult = 2 ** i
|
||||
model += [nn.Conv2d(channels[0+i], channels[1+i], kernel_size=3, stride=2, padding=1, bias=use_bias),
|
||||
norm_layer(channels[1+i]),
|
||||
nn.ReLU(True)]
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
|
||||
n_blocks1 = n_blocks // 3
|
||||
n_blocks2 = n_blocks1
|
||||
n_blocks3 = n_blocks - n_blocks1 - n_blocks2
|
||||
|
||||
for i in range(n_blocks1):
|
||||
c = n_downsampling
|
||||
dim = channels[c]
|
||||
model += [ResnetBlock(dim, padding_type=padding_type, norm_layer=norm_layer)]
|
||||
|
||||
for i in range(n_blocks2):
|
||||
c = n_downsampling+1
|
||||
dim = channels[c]
|
||||
kwargs = {}
|
||||
if i == 0:
|
||||
kwargs = {"in_dim": channels[c-1]}
|
||||
model += [ResnetBlock(dim, padding_type=padding_type, norm_layer=norm_layer, **kwargs)]
|
||||
|
||||
for i in range(n_blocks3):
|
||||
c = n_downsampling+2
|
||||
dim = channels[c]
|
||||
kwargs = {}
|
||||
if i == 0:
|
||||
kwargs = {"in_dim": channels[c-1]}
|
||||
model += [ResnetBlock(dim, padding_type=padding_type, norm_layer=norm_layer, **kwargs)]
|
||||
|
||||
for i in range(n_downsampling): # add upsampling layers
|
||||
mult = 2 ** (n_downsampling - i)
|
||||
model += [nn.ConvTranspose2d(channels[n_downsampling+3+i],
|
||||
channels[n_downsampling+3+i+1],
|
||||
kernel_size=3, stride=2,
|
||||
padding=1, output_padding=1,
|
||||
bias=use_bias),
|
||||
norm_layer(channels[n_downsampling+3+i+1]),
|
||||
nn.ReLU(True)]
|
||||
model += [nn.ReflectionPad2d(3)]
|
||||
model += [nn.Conv2d(channels[2*n_downsampling+3], output_nc, kernel_size=7, padding=0)]
|
||||
|
||||
if add_out_act:
|
||||
model.append(get_activation('tanh' if add_out_act is True else add_out_act))
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def convert_super_channels(self, super_channels):
|
||||
n_downsampling = self.n_downsampling
|
||||
result = []
|
||||
cnt = 0
|
||||
|
||||
if n_downsampling == 2:
|
||||
N1 = 10
|
||||
elif n_downsampling == 3:
|
||||
N1 = 13
|
||||
else:
|
||||
raise NotImplementedError
|
||||
|
||||
for i in range(0, N1):
|
||||
if i in [1,4,7,10]:
|
||||
channel = super_channels[cnt] * (2 ** cnt)
|
||||
config = {'channel': channel}
|
||||
result.append(channel)
|
||||
logging.info(f"Downsample channels {result[-1]}")
|
||||
cnt += 1
|
||||
|
||||
for i in range(3):
|
||||
for counter, j in enumerate(range(N1 + i * 3, N1 + 3 + i * 3)):
|
||||
if len(super_channels) == 6:
|
||||
channel = super_channels[3] * 4
|
||||
else:
|
||||
channel = super_channels[i + 3] * 4
|
||||
config = {'channel': channel}
|
||||
if counter == 0:
|
||||
result.append(channel)
|
||||
logging.info(f"Bottleneck channels {result[-1]}")
|
||||
cnt = 2
|
||||
|
||||
for i in range(N1+9, N1+21):
|
||||
if i in [22, 25,28]:
|
||||
cnt -= 1
|
||||
if len(super_channels) == 6:
|
||||
channel = super_channels[5 - cnt] * (2 ** cnt)
|
||||
else:
|
||||
channel = super_channels[7 - cnt] * (2 ** cnt)
|
||||
result.append(int(channel))
|
||||
logging.info(f"Upsample channels {result[-1]}")
|
||||
return result
|
||||
|
||||
def forward(self, input):
|
||||
return self.model(input)
|
||||
|
||||
|
||||
# Defines the PatchGAN discriminator with the specified arguments.
|
||||
class NLayerDiscriminator(BaseDiscriminator):
|
||||
def __init__(self, input_nc, ndf=64, n_layers=3, norm_layer=nn.BatchNorm2d,):
|
||||
super().__init__()
|
||||
self.n_layers = n_layers
|
||||
|
||||
kw = 4
|
||||
padw = int(np.ceil((kw-1.0)/2))
|
||||
sequence = [[nn.Conv2d(input_nc, ndf, kernel_size=kw, stride=2, padding=padw),
|
||||
nn.LeakyReLU(0.2, True)]]
|
||||
|
||||
nf = ndf
|
||||
for n in range(1, n_layers):
|
||||
nf_prev = nf
|
||||
nf = min(nf * 2, 512)
|
||||
|
||||
cur_model = []
|
||||
cur_model += [
|
||||
nn.Conv2d(nf_prev, nf, kernel_size=kw, stride=2, padding=padw),
|
||||
norm_layer(nf),
|
||||
nn.LeakyReLU(0.2, True)
|
||||
]
|
||||
sequence.append(cur_model)
|
||||
|
||||
nf_prev = nf
|
||||
nf = min(nf * 2, 512)
|
||||
|
||||
cur_model = []
|
||||
cur_model += [
|
||||
nn.Conv2d(nf_prev, nf, kernel_size=kw, stride=1, padding=padw),
|
||||
norm_layer(nf),
|
||||
nn.LeakyReLU(0.2, True)
|
||||
]
|
||||
sequence.append(cur_model)
|
||||
|
||||
sequence += [[nn.Conv2d(nf, 1, kernel_size=kw, stride=1, padding=padw)]]
|
||||
|
||||
for n in range(len(sequence)):
|
||||
setattr(self, 'model'+str(n), nn.Sequential(*sequence[n]))
|
||||
|
||||
def get_all_activations(self, x):
|
||||
res = [x]
|
||||
for n in range(self.n_layers + 2):
|
||||
model = getattr(self, 'model' + str(n))
|
||||
res.append(model(res[-1]))
|
||||
return res[1:]
|
||||
|
||||
def forward(self, x):
|
||||
act = self.get_all_activations(x)
|
||||
return act[-1], act[:-1]
|
||||
|
||||
|
||||
class MultidilatedNLayerDiscriminator(BaseDiscriminator):
|
||||
def __init__(self, input_nc, ndf=64, n_layers=3, norm_layer=nn.BatchNorm2d, multidilation_kwargs={}):
|
||||
super().__init__()
|
||||
self.n_layers = n_layers
|
||||
|
||||
kw = 4
|
||||
padw = int(np.ceil((kw-1.0)/2))
|
||||
sequence = [[nn.Conv2d(input_nc, ndf, kernel_size=kw, stride=2, padding=padw),
|
||||
nn.LeakyReLU(0.2, True)]]
|
||||
|
||||
nf = ndf
|
||||
for n in range(1, n_layers):
|
||||
nf_prev = nf
|
||||
nf = min(nf * 2, 512)
|
||||
|
||||
cur_model = []
|
||||
cur_model += [
|
||||
MultidilatedConv(nf_prev, nf, kernel_size=kw, stride=2, padding=[2, 3], **multidilation_kwargs),
|
||||
norm_layer(nf),
|
||||
nn.LeakyReLU(0.2, True)
|
||||
]
|
||||
sequence.append(cur_model)
|
||||
|
||||
nf_prev = nf
|
||||
nf = min(nf * 2, 512)
|
||||
|
||||
cur_model = []
|
||||
cur_model += [
|
||||
nn.Conv2d(nf_prev, nf, kernel_size=kw, stride=1, padding=padw),
|
||||
norm_layer(nf),
|
||||
nn.LeakyReLU(0.2, True)
|
||||
]
|
||||
sequence.append(cur_model)
|
||||
|
||||
sequence += [[nn.Conv2d(nf, 1, kernel_size=kw, stride=1, padding=padw)]]
|
||||
|
||||
for n in range(len(sequence)):
|
||||
setattr(self, 'model'+str(n), nn.Sequential(*sequence[n]))
|
||||
|
||||
def get_all_activations(self, x):
|
||||
res = [x]
|
||||
for n in range(self.n_layers + 2):
|
||||
model = getattr(self, 'model' + str(n))
|
||||
res.append(model(res[-1]))
|
||||
return res[1:]
|
||||
|
||||
def forward(self, x):
|
||||
act = self.get_all_activations(x)
|
||||
return act[-1], act[:-1]
|
||||
|
||||
|
||||
class NLayerDiscriminatorAsGen(NLayerDiscriminator):
|
||||
def forward(self, x):
|
||||
return super().forward(x)[0]
|
||||
@@ -0,0 +1,49 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
from kornia.geometry.transform import rotate
|
||||
|
||||
|
||||
class LearnableSpatialTransformWrapper(nn.Module):
|
||||
def __init__(self, impl, pad_coef=0.5, angle_init_range=80, train_angle=True):
|
||||
super().__init__()
|
||||
self.impl = impl
|
||||
self.angle = torch.rand(1) * angle_init_range
|
||||
if train_angle:
|
||||
self.angle = nn.Parameter(self.angle, requires_grad=True)
|
||||
self.pad_coef = pad_coef
|
||||
|
||||
def forward(self, x):
|
||||
if torch.is_tensor(x):
|
||||
return self.inverse_transform(self.impl(self.transform(x)), x)
|
||||
elif isinstance(x, tuple):
|
||||
x_trans = tuple(self.transform(elem) for elem in x)
|
||||
y_trans = self.impl(x_trans)
|
||||
return tuple(self.inverse_transform(elem, orig_x) for elem, orig_x in zip(y_trans, x))
|
||||
else:
|
||||
raise ValueError(f'Unexpected input type {type(x)}')
|
||||
|
||||
def transform(self, x):
|
||||
height, width = x.shape[2:]
|
||||
pad_h, pad_w = int(height * self.pad_coef), int(width * self.pad_coef)
|
||||
x_padded = F.pad(x, [pad_w, pad_w, pad_h, pad_h], mode='reflect')
|
||||
x_padded_rotated = rotate(x_padded, angle=self.angle.to(x_padded))
|
||||
return x_padded_rotated
|
||||
|
||||
def inverse_transform(self, y_padded_rotated, orig_x):
|
||||
height, width = orig_x.shape[2:]
|
||||
pad_h, pad_w = int(height * self.pad_coef), int(width * self.pad_coef)
|
||||
|
||||
y_padded = rotate(y_padded_rotated, angle=-self.angle.to(y_padded_rotated))
|
||||
y_height, y_width = y_padded.shape[2:]
|
||||
y = y_padded[:, :, pad_h : y_height - pad_h, pad_w : y_width - pad_w]
|
||||
return y
|
||||
|
||||
|
||||
if __name__ == '__main__':
|
||||
layer = LearnableSpatialTransformWrapper(nn.Identity())
|
||||
x = torch.arange(2* 3 * 15 * 15).view(2, 3, 15, 15).float()
|
||||
y = layer(x)
|
||||
assert x.shape == y.shape
|
||||
assert torch.allclose(x[:, :, 1:, 1:][:, :, :-1, :-1], y[:, :, 1:, 1:][:, :, :-1, :-1])
|
||||
print('all ok')
|
||||
@@ -0,0 +1,20 @@
|
||||
import torch.nn as nn
|
||||
|
||||
|
||||
class SELayer(nn.Module):
|
||||
def __init__(self, channel, reduction=16):
|
||||
super(SELayer, self).__init__()
|
||||
self.avg_pool = nn.AdaptiveAvgPool2d(1)
|
||||
self.fc = nn.Sequential(
|
||||
nn.Linear(channel, channel // reduction, bias=False),
|
||||
nn.ReLU(inplace=True),
|
||||
nn.Linear(channel // reduction, channel, bias=False),
|
||||
nn.Sigmoid()
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
b, c, _, _ = x.size()
|
||||
y = self.avg_pool(x).view(b, c)
|
||||
y = self.fc(y).view(b, c, 1, 1)
|
||||
res = x * y.expand_as(x)
|
||||
return res
|
||||
@@ -0,0 +1,29 @@
|
||||
import logging
|
||||
import torch
|
||||
from annotator.lama.saicinpainting.training.trainers.default import DefaultInpaintingTrainingModule
|
||||
|
||||
|
||||
def get_training_model_class(kind):
|
||||
if kind == 'default':
|
||||
return DefaultInpaintingTrainingModule
|
||||
|
||||
raise ValueError(f'Unknown trainer module {kind}')
|
||||
|
||||
|
||||
def make_training_model(config):
|
||||
kind = config.training_model.kind
|
||||
kwargs = dict(config.training_model)
|
||||
kwargs.pop('kind')
|
||||
kwargs['use_ddp'] = config.trainer.kwargs.get('accelerator', None) == 'ddp'
|
||||
|
||||
logging.info(f'Make training model {kind}')
|
||||
|
||||
cls = get_training_model_class(kind)
|
||||
return cls(config, **kwargs)
|
||||
|
||||
|
||||
def load_checkpoint(train_config, path, map_location='cuda', strict=True):
|
||||
model = make_training_model(train_config).generator
|
||||
state = torch.load(path, map_location=map_location)
|
||||
model.load_state_dict(state, strict=strict)
|
||||
return model
|
||||
@@ -0,0 +1,293 @@
|
||||
import copy
|
||||
import logging
|
||||
from typing import Dict, Tuple
|
||||
|
||||
import pandas as pd
|
||||
import pytorch_lightning as ptl
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
# from torch.utils.data import DistributedSampler
|
||||
|
||||
# from annotator.lama.saicinpainting.evaluation import make_evaluator
|
||||
# from annotator.lama.saicinpainting.training.data.datasets import make_default_train_dataloader, make_default_val_dataloader
|
||||
# from annotator.lama.saicinpainting.training.losses.adversarial import make_discrim_loss
|
||||
# from annotator.lama.saicinpainting.training.losses.perceptual import PerceptualLoss, ResNetPL
|
||||
from annotator.lama.saicinpainting.training.modules import make_generator #, make_discriminator
|
||||
# from annotator.lama.saicinpainting.training.visualizers import make_visualizer
|
||||
from annotator.lama.saicinpainting.utils import add_prefix_to_keys, average_dicts, set_requires_grad, flatten_dict, \
|
||||
get_has_ddp_rank
|
||||
|
||||
LOGGER = logging.getLogger(__name__)
|
||||
|
||||
|
||||
def make_optimizer(parameters, kind='adamw', **kwargs):
|
||||
if kind == 'adam':
|
||||
optimizer_class = torch.optim.Adam
|
||||
elif kind == 'adamw':
|
||||
optimizer_class = torch.optim.AdamW
|
||||
else:
|
||||
raise ValueError(f'Unknown optimizer kind {kind}')
|
||||
return optimizer_class(parameters, **kwargs)
|
||||
|
||||
|
||||
def update_running_average(result: nn.Module, new_iterate_model: nn.Module, decay=0.999):
|
||||
with torch.no_grad():
|
||||
res_params = dict(result.named_parameters())
|
||||
new_params = dict(new_iterate_model.named_parameters())
|
||||
|
||||
for k in res_params.keys():
|
||||
res_params[k].data.mul_(decay).add_(new_params[k].data, alpha=1 - decay)
|
||||
|
||||
|
||||
def make_multiscale_noise(base_tensor, scales=6, scale_mode='bilinear'):
|
||||
batch_size, _, height, width = base_tensor.shape
|
||||
cur_height, cur_width = height, width
|
||||
result = []
|
||||
align_corners = False if scale_mode in ('bilinear', 'bicubic') else None
|
||||
for _ in range(scales):
|
||||
cur_sample = torch.randn(batch_size, 1, cur_height, cur_width, device=base_tensor.device)
|
||||
cur_sample_scaled = F.interpolate(cur_sample, size=(height, width), mode=scale_mode, align_corners=align_corners)
|
||||
result.append(cur_sample_scaled)
|
||||
cur_height //= 2
|
||||
cur_width //= 2
|
||||
return torch.cat(result, dim=1)
|
||||
|
||||
|
||||
class BaseInpaintingTrainingModule(ptl.LightningModule):
|
||||
def __init__(self, config, use_ddp, *args, predict_only=False, visualize_each_iters=100,
|
||||
average_generator=False, generator_avg_beta=0.999, average_generator_start_step=30000,
|
||||
average_generator_period=10, store_discr_outputs_for_vis=False,
|
||||
**kwargs):
|
||||
super().__init__(*args, **kwargs)
|
||||
LOGGER.info('BaseInpaintingTrainingModule init called')
|
||||
|
||||
self.config = config
|
||||
|
||||
self.generator = make_generator(config, **self.config.generator)
|
||||
self.use_ddp = use_ddp
|
||||
|
||||
if not get_has_ddp_rank():
|
||||
LOGGER.info(f'Generator\n{self.generator}')
|
||||
|
||||
# if not predict_only:
|
||||
# self.save_hyperparameters(self.config)
|
||||
# self.discriminator = make_discriminator(**self.config.discriminator)
|
||||
# self.adversarial_loss = make_discrim_loss(**self.config.losses.adversarial)
|
||||
# self.visualizer = make_visualizer(**self.config.visualizer)
|
||||
# self.val_evaluator = make_evaluator(**self.config.evaluator)
|
||||
# self.test_evaluator = make_evaluator(**self.config.evaluator)
|
||||
#
|
||||
# if not get_has_ddp_rank():
|
||||
# LOGGER.info(f'Discriminator\n{self.discriminator}')
|
||||
#
|
||||
# extra_val = self.config.data.get('extra_val', ())
|
||||
# if extra_val:
|
||||
# self.extra_val_titles = list(extra_val)
|
||||
# self.extra_evaluators = nn.ModuleDict({k: make_evaluator(**self.config.evaluator)
|
||||
# for k in extra_val})
|
||||
# else:
|
||||
# self.extra_evaluators = {}
|
||||
#
|
||||
# self.average_generator = average_generator
|
||||
# self.generator_avg_beta = generator_avg_beta
|
||||
# self.average_generator_start_step = average_generator_start_step
|
||||
# self.average_generator_period = average_generator_period
|
||||
# self.generator_average = None
|
||||
# self.last_generator_averaging_step = -1
|
||||
# self.store_discr_outputs_for_vis = store_discr_outputs_for_vis
|
||||
#
|
||||
# if self.config.losses.get("l1", {"weight_known": 0})['weight_known'] > 0:
|
||||
# self.loss_l1 = nn.L1Loss(reduction='none')
|
||||
#
|
||||
# if self.config.losses.get("mse", {"weight": 0})['weight'] > 0:
|
||||
# self.loss_mse = nn.MSELoss(reduction='none')
|
||||
#
|
||||
# if self.config.losses.perceptual.weight > 0:
|
||||
# self.loss_pl = PerceptualLoss()
|
||||
#
|
||||
# # if self.config.losses.get("resnet_pl", {"weight": 0})['weight'] > 0:
|
||||
# # self.loss_resnet_pl = ResNetPL(**self.config.losses.resnet_pl)
|
||||
# # else:
|
||||
# # self.loss_resnet_pl = None
|
||||
#
|
||||
# self.loss_resnet_pl = None
|
||||
|
||||
self.visualize_each_iters = visualize_each_iters
|
||||
LOGGER.info('BaseInpaintingTrainingModule init done')
|
||||
|
||||
def configure_optimizers(self):
|
||||
discriminator_params = list(self.discriminator.parameters())
|
||||
return [
|
||||
dict(optimizer=make_optimizer(self.generator.parameters(), **self.config.optimizers.generator)),
|
||||
dict(optimizer=make_optimizer(discriminator_params, **self.config.optimizers.discriminator)),
|
||||
]
|
||||
|
||||
def train_dataloader(self):
|
||||
kwargs = dict(self.config.data.train)
|
||||
if self.use_ddp:
|
||||
kwargs['ddp_kwargs'] = dict(num_replicas=self.trainer.num_nodes * self.trainer.num_processes,
|
||||
rank=self.trainer.global_rank,
|
||||
shuffle=True)
|
||||
dataloader = make_default_train_dataloader(**self.config.data.train)
|
||||
return dataloader
|
||||
|
||||
def val_dataloader(self):
|
||||
res = [make_default_val_dataloader(**self.config.data.val)]
|
||||
|
||||
if self.config.data.visual_test is not None:
|
||||
res = res + [make_default_val_dataloader(**self.config.data.visual_test)]
|
||||
else:
|
||||
res = res + res
|
||||
|
||||
extra_val = self.config.data.get('extra_val', ())
|
||||
if extra_val:
|
||||
res += [make_default_val_dataloader(**extra_val[k]) for k in self.extra_val_titles]
|
||||
|
||||
return res
|
||||
|
||||
def training_step(self, batch, batch_idx, optimizer_idx=None):
|
||||
self._is_training_step = True
|
||||
return self._do_step(batch, batch_idx, mode='train', optimizer_idx=optimizer_idx)
|
||||
|
||||
def validation_step(self, batch, batch_idx, dataloader_idx):
|
||||
extra_val_key = None
|
||||
if dataloader_idx == 0:
|
||||
mode = 'val'
|
||||
elif dataloader_idx == 1:
|
||||
mode = 'test'
|
||||
else:
|
||||
mode = 'extra_val'
|
||||
extra_val_key = self.extra_val_titles[dataloader_idx - 2]
|
||||
self._is_training_step = False
|
||||
return self._do_step(batch, batch_idx, mode=mode, extra_val_key=extra_val_key)
|
||||
|
||||
def training_step_end(self, batch_parts_outputs):
|
||||
if self.training and self.average_generator \
|
||||
and self.global_step >= self.average_generator_start_step \
|
||||
and self.global_step >= self.last_generator_averaging_step + self.average_generator_period:
|
||||
if self.generator_average is None:
|
||||
self.generator_average = copy.deepcopy(self.generator)
|
||||
else:
|
||||
update_running_average(self.generator_average, self.generator, decay=self.generator_avg_beta)
|
||||
self.last_generator_averaging_step = self.global_step
|
||||
|
||||
full_loss = (batch_parts_outputs['loss'].mean()
|
||||
if torch.is_tensor(batch_parts_outputs['loss']) # loss is not tensor when no discriminator used
|
||||
else torch.tensor(batch_parts_outputs['loss']).float().requires_grad_(True))
|
||||
log_info = {k: v.mean() for k, v in batch_parts_outputs['log_info'].items()}
|
||||
self.log_dict(log_info, on_step=True, on_epoch=False)
|
||||
return full_loss
|
||||
|
||||
def validation_epoch_end(self, outputs):
|
||||
outputs = [step_out for out_group in outputs for step_out in out_group]
|
||||
averaged_logs = average_dicts(step_out['log_info'] for step_out in outputs)
|
||||
self.log_dict({k: v.mean() for k, v in averaged_logs.items()})
|
||||
|
||||
pd.set_option('display.max_columns', 500)
|
||||
pd.set_option('display.width', 1000)
|
||||
|
||||
# standard validation
|
||||
val_evaluator_states = [s['val_evaluator_state'] for s in outputs if 'val_evaluator_state' in s]
|
||||
val_evaluator_res = self.val_evaluator.evaluation_end(states=val_evaluator_states)
|
||||
val_evaluator_res_df = pd.DataFrame(val_evaluator_res).stack(1).unstack(0)
|
||||
val_evaluator_res_df.dropna(axis=1, how='all', inplace=True)
|
||||
LOGGER.info(f'Validation metrics after epoch #{self.current_epoch}, '
|
||||
f'total {self.global_step} iterations:\n{val_evaluator_res_df}')
|
||||
|
||||
for k, v in flatten_dict(val_evaluator_res).items():
|
||||
self.log(f'val_{k}', v)
|
||||
|
||||
# standard visual test
|
||||
test_evaluator_states = [s['test_evaluator_state'] for s in outputs
|
||||
if 'test_evaluator_state' in s]
|
||||
test_evaluator_res = self.test_evaluator.evaluation_end(states=test_evaluator_states)
|
||||
test_evaluator_res_df = pd.DataFrame(test_evaluator_res).stack(1).unstack(0)
|
||||
test_evaluator_res_df.dropna(axis=1, how='all', inplace=True)
|
||||
LOGGER.info(f'Test metrics after epoch #{self.current_epoch}, '
|
||||
f'total {self.global_step} iterations:\n{test_evaluator_res_df}')
|
||||
|
||||
for k, v in flatten_dict(test_evaluator_res).items():
|
||||
self.log(f'test_{k}', v)
|
||||
|
||||
# extra validations
|
||||
if self.extra_evaluators:
|
||||
for cur_eval_title, cur_evaluator in self.extra_evaluators.items():
|
||||
cur_state_key = f'extra_val_{cur_eval_title}_evaluator_state'
|
||||
cur_states = [s[cur_state_key] for s in outputs if cur_state_key in s]
|
||||
cur_evaluator_res = cur_evaluator.evaluation_end(states=cur_states)
|
||||
cur_evaluator_res_df = pd.DataFrame(cur_evaluator_res).stack(1).unstack(0)
|
||||
cur_evaluator_res_df.dropna(axis=1, how='all', inplace=True)
|
||||
LOGGER.info(f'Extra val {cur_eval_title} metrics after epoch #{self.current_epoch}, '
|
||||
f'total {self.global_step} iterations:\n{cur_evaluator_res_df}')
|
||||
for k, v in flatten_dict(cur_evaluator_res).items():
|
||||
self.log(f'extra_val_{cur_eval_title}_{k}', v)
|
||||
|
||||
def _do_step(self, batch, batch_idx, mode='train', optimizer_idx=None, extra_val_key=None):
|
||||
if optimizer_idx == 0: # step for generator
|
||||
set_requires_grad(self.generator, True)
|
||||
set_requires_grad(self.discriminator, False)
|
||||
elif optimizer_idx == 1: # step for discriminator
|
||||
set_requires_grad(self.generator, False)
|
||||
set_requires_grad(self.discriminator, True)
|
||||
|
||||
batch = self(batch)
|
||||
|
||||
total_loss = 0
|
||||
metrics = {}
|
||||
|
||||
if optimizer_idx is None or optimizer_idx == 0: # step for generator
|
||||
total_loss, metrics = self.generator_loss(batch)
|
||||
|
||||
elif optimizer_idx is None or optimizer_idx == 1: # step for discriminator
|
||||
if self.config.losses.adversarial.weight > 0:
|
||||
total_loss, metrics = self.discriminator_loss(batch)
|
||||
|
||||
if self.get_ddp_rank() in (None, 0) and (batch_idx % self.visualize_each_iters == 0 or mode == 'test'):
|
||||
if self.config.losses.adversarial.weight > 0:
|
||||
if self.store_discr_outputs_for_vis:
|
||||
with torch.no_grad():
|
||||
self.store_discr_outputs(batch)
|
||||
vis_suffix = f'_{mode}'
|
||||
if mode == 'extra_val':
|
||||
vis_suffix += f'_{extra_val_key}'
|
||||
self.visualizer(self.current_epoch, batch_idx, batch, suffix=vis_suffix)
|
||||
|
||||
metrics_prefix = f'{mode}_'
|
||||
if mode == 'extra_val':
|
||||
metrics_prefix += f'{extra_val_key}_'
|
||||
result = dict(loss=total_loss, log_info=add_prefix_to_keys(metrics, metrics_prefix))
|
||||
if mode == 'val':
|
||||
result['val_evaluator_state'] = self.val_evaluator.process_batch(batch)
|
||||
elif mode == 'test':
|
||||
result['test_evaluator_state'] = self.test_evaluator.process_batch(batch)
|
||||
elif mode == 'extra_val':
|
||||
result[f'extra_val_{extra_val_key}_evaluator_state'] = self.extra_evaluators[extra_val_key].process_batch(batch)
|
||||
|
||||
return result
|
||||
|
||||
def get_current_generator(self, no_average=False):
|
||||
if not no_average and not self.training and self.average_generator and self.generator_average is not None:
|
||||
return self.generator_average
|
||||
return self.generator
|
||||
|
||||
def forward(self, batch: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
|
||||
"""Pass data through generator and obtain at leas 'predicted_image' and 'inpainted' keys"""
|
||||
raise NotImplementedError()
|
||||
|
||||
def generator_loss(self, batch) -> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
raise NotImplementedError()
|
||||
|
||||
def discriminator_loss(self, batch) -> Tuple[torch.Tensor, Dict[str, torch.Tensor]]:
|
||||
raise NotImplementedError()
|
||||
|
||||
def store_discr_outputs(self, batch):
|
||||
out_size = batch['image'].shape[2:]
|
||||
discr_real_out, _ = self.discriminator(batch['image'])
|
||||
discr_fake_out, _ = self.discriminator(batch['predicted_image'])
|
||||
batch['discr_output_real'] = F.interpolate(discr_real_out, size=out_size, mode='nearest')
|
||||
batch['discr_output_fake'] = F.interpolate(discr_fake_out, size=out_size, mode='nearest')
|
||||
batch['discr_output_diff'] = batch['discr_output_real'] - batch['discr_output_fake']
|
||||
|
||||
def get_ddp_rank(self):
|
||||
return self.trainer.global_rank if (self.trainer.num_nodes * self.trainer.num_processes) > 1 else None
|
||||
@@ -0,0 +1,175 @@
|
||||
import logging
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
from omegaconf import OmegaConf
|
||||
|
||||
# from annotator.lama.saicinpainting.training.data.datasets import make_constant_area_crop_params
|
||||
from annotator.lama.saicinpainting.training.losses.distance_weighting import make_mask_distance_weighter
|
||||
from annotator.lama.saicinpainting.training.losses.feature_matching import feature_matching_loss, masked_l1_loss
|
||||
# from annotator.lama.saicinpainting.training.modules.fake_fakes import FakeFakesGenerator
|
||||
from annotator.lama.saicinpainting.training.trainers.base import BaseInpaintingTrainingModule, make_multiscale_noise
|
||||
from annotator.lama.saicinpainting.utils import add_prefix_to_keys, get_ramp
|
||||
|
||||
LOGGER = logging.getLogger(__name__)
|
||||
|
||||
|
||||
def make_constant_area_crop_batch(batch, **kwargs):
|
||||
crop_y, crop_x, crop_height, crop_width = make_constant_area_crop_params(img_height=batch['image'].shape[2],
|
||||
img_width=batch['image'].shape[3],
|
||||
**kwargs)
|
||||
batch['image'] = batch['image'][:, :, crop_y : crop_y + crop_height, crop_x : crop_x + crop_width]
|
||||
batch['mask'] = batch['mask'][:, :, crop_y: crop_y + crop_height, crop_x: crop_x + crop_width]
|
||||
return batch
|
||||
|
||||
|
||||
class DefaultInpaintingTrainingModule(BaseInpaintingTrainingModule):
|
||||
def __init__(self, *args, concat_mask=True, rescale_scheduler_kwargs=None, image_to_discriminator='predicted_image',
|
||||
add_noise_kwargs=None, noise_fill_hole=False, const_area_crop_kwargs=None,
|
||||
distance_weighter_kwargs=None, distance_weighted_mask_for_discr=False,
|
||||
fake_fakes_proba=0, fake_fakes_generator_kwargs=None,
|
||||
**kwargs):
|
||||
super().__init__(*args, **kwargs)
|
||||
self.concat_mask = concat_mask
|
||||
self.rescale_size_getter = get_ramp(**rescale_scheduler_kwargs) if rescale_scheduler_kwargs is not None else None
|
||||
self.image_to_discriminator = image_to_discriminator
|
||||
self.add_noise_kwargs = add_noise_kwargs
|
||||
self.noise_fill_hole = noise_fill_hole
|
||||
self.const_area_crop_kwargs = const_area_crop_kwargs
|
||||
self.refine_mask_for_losses = make_mask_distance_weighter(**distance_weighter_kwargs) \
|
||||
if distance_weighter_kwargs is not None else None
|
||||
self.distance_weighted_mask_for_discr = distance_weighted_mask_for_discr
|
||||
|
||||
self.fake_fakes_proba = fake_fakes_proba
|
||||
if self.fake_fakes_proba > 1e-3:
|
||||
self.fake_fakes_gen = FakeFakesGenerator(**(fake_fakes_generator_kwargs or {}))
|
||||
|
||||
def forward(self, batch):
|
||||
if self.training and self.rescale_size_getter is not None:
|
||||
cur_size = self.rescale_size_getter(self.global_step)
|
||||
batch['image'] = F.interpolate(batch['image'], size=cur_size, mode='bilinear', align_corners=False)
|
||||
batch['mask'] = F.interpolate(batch['mask'], size=cur_size, mode='nearest')
|
||||
|
||||
if self.training and self.const_area_crop_kwargs is not None:
|
||||
batch = make_constant_area_crop_batch(batch, **self.const_area_crop_kwargs)
|
||||
|
||||
img = batch['image']
|
||||
mask = batch['mask']
|
||||
|
||||
masked_img = img * (1 - mask)
|
||||
|
||||
if self.add_noise_kwargs is not None:
|
||||
noise = make_multiscale_noise(masked_img, **self.add_noise_kwargs)
|
||||
if self.noise_fill_hole:
|
||||
masked_img = masked_img + mask * noise[:, :masked_img.shape[1]]
|
||||
masked_img = torch.cat([masked_img, noise], dim=1)
|
||||
|
||||
if self.concat_mask:
|
||||
masked_img = torch.cat([masked_img, mask], dim=1)
|
||||
|
||||
batch['predicted_image'] = self.generator(masked_img)
|
||||
batch['inpainted'] = mask * batch['predicted_image'] + (1 - mask) * batch['image']
|
||||
|
||||
if self.fake_fakes_proba > 1e-3:
|
||||
if self.training and torch.rand(1).item() < self.fake_fakes_proba:
|
||||
batch['fake_fakes'], batch['fake_fakes_masks'] = self.fake_fakes_gen(img, mask)
|
||||
batch['use_fake_fakes'] = True
|
||||
else:
|
||||
batch['fake_fakes'] = torch.zeros_like(img)
|
||||
batch['fake_fakes_masks'] = torch.zeros_like(mask)
|
||||
batch['use_fake_fakes'] = False
|
||||
|
||||
batch['mask_for_losses'] = self.refine_mask_for_losses(img, batch['predicted_image'], mask) \
|
||||
if self.refine_mask_for_losses is not None and self.training \
|
||||
else mask
|
||||
|
||||
return batch
|
||||
|
||||
def generator_loss(self, batch):
|
||||
img = batch['image']
|
||||
predicted_img = batch[self.image_to_discriminator]
|
||||
original_mask = batch['mask']
|
||||
supervised_mask = batch['mask_for_losses']
|
||||
|
||||
# L1
|
||||
l1_value = masked_l1_loss(predicted_img, img, supervised_mask,
|
||||
self.config.losses.l1.weight_known,
|
||||
self.config.losses.l1.weight_missing)
|
||||
|
||||
total_loss = l1_value
|
||||
metrics = dict(gen_l1=l1_value)
|
||||
|
||||
# vgg-based perceptual loss
|
||||
if self.config.losses.perceptual.weight > 0:
|
||||
pl_value = self.loss_pl(predicted_img, img, mask=supervised_mask).sum() * self.config.losses.perceptual.weight
|
||||
total_loss = total_loss + pl_value
|
||||
metrics['gen_pl'] = pl_value
|
||||
|
||||
# discriminator
|
||||
# adversarial_loss calls backward by itself
|
||||
mask_for_discr = supervised_mask if self.distance_weighted_mask_for_discr else original_mask
|
||||
self.adversarial_loss.pre_generator_step(real_batch=img, fake_batch=predicted_img,
|
||||
generator=self.generator, discriminator=self.discriminator)
|
||||
discr_real_pred, discr_real_features = self.discriminator(img)
|
||||
discr_fake_pred, discr_fake_features = self.discriminator(predicted_img)
|
||||
adv_gen_loss, adv_metrics = self.adversarial_loss.generator_loss(real_batch=img,
|
||||
fake_batch=predicted_img,
|
||||
discr_real_pred=discr_real_pred,
|
||||
discr_fake_pred=discr_fake_pred,
|
||||
mask=mask_for_discr)
|
||||
total_loss = total_loss + adv_gen_loss
|
||||
metrics['gen_adv'] = adv_gen_loss
|
||||
metrics.update(add_prefix_to_keys(adv_metrics, 'adv_'))
|
||||
|
||||
# feature matching
|
||||
if self.config.losses.feature_matching.weight > 0:
|
||||
need_mask_in_fm = OmegaConf.to_container(self.config.losses.feature_matching).get('pass_mask', False)
|
||||
mask_for_fm = supervised_mask if need_mask_in_fm else None
|
||||
fm_value = feature_matching_loss(discr_fake_features, discr_real_features,
|
||||
mask=mask_for_fm) * self.config.losses.feature_matching.weight
|
||||
total_loss = total_loss + fm_value
|
||||
metrics['gen_fm'] = fm_value
|
||||
|
||||
if self.loss_resnet_pl is not None:
|
||||
resnet_pl_value = self.loss_resnet_pl(predicted_img, img)
|
||||
total_loss = total_loss + resnet_pl_value
|
||||
metrics['gen_resnet_pl'] = resnet_pl_value
|
||||
|
||||
return total_loss, metrics
|
||||
|
||||
def discriminator_loss(self, batch):
|
||||
total_loss = 0
|
||||
metrics = {}
|
||||
|
||||
predicted_img = batch[self.image_to_discriminator].detach()
|
||||
self.adversarial_loss.pre_discriminator_step(real_batch=batch['image'], fake_batch=predicted_img,
|
||||
generator=self.generator, discriminator=self.discriminator)
|
||||
discr_real_pred, discr_real_features = self.discriminator(batch['image'])
|
||||
discr_fake_pred, discr_fake_features = self.discriminator(predicted_img)
|
||||
adv_discr_loss, adv_metrics = self.adversarial_loss.discriminator_loss(real_batch=batch['image'],
|
||||
fake_batch=predicted_img,
|
||||
discr_real_pred=discr_real_pred,
|
||||
discr_fake_pred=discr_fake_pred,
|
||||
mask=batch['mask'])
|
||||
total_loss = total_loss + adv_discr_loss
|
||||
metrics['discr_adv'] = adv_discr_loss
|
||||
metrics.update(add_prefix_to_keys(adv_metrics, 'adv_'))
|
||||
|
||||
|
||||
if batch.get('use_fake_fakes', False):
|
||||
fake_fakes = batch['fake_fakes']
|
||||
self.adversarial_loss.pre_discriminator_step(real_batch=batch['image'], fake_batch=fake_fakes,
|
||||
generator=self.generator, discriminator=self.discriminator)
|
||||
discr_fake_fakes_pred, _ = self.discriminator(fake_fakes)
|
||||
fake_fakes_adv_discr_loss, fake_fakes_adv_metrics = self.adversarial_loss.discriminator_loss(
|
||||
real_batch=batch['image'],
|
||||
fake_batch=fake_fakes,
|
||||
discr_real_pred=discr_real_pred,
|
||||
discr_fake_pred=discr_fake_fakes_pred,
|
||||
mask=batch['mask']
|
||||
)
|
||||
total_loss = total_loss + fake_fakes_adv_discr_loss
|
||||
metrics['discr_adv_fake_fakes'] = fake_fakes_adv_discr_loss
|
||||
metrics.update(add_prefix_to_keys(fake_fakes_adv_metrics, 'adv_'))
|
||||
|
||||
return total_loss, metrics
|
||||
@@ -0,0 +1,15 @@
|
||||
import logging
|
||||
|
||||
from annotator.lama.saicinpainting.training.visualizers.directory import DirectoryVisualizer
|
||||
from annotator.lama.saicinpainting.training.visualizers.noop import NoopVisualizer
|
||||
|
||||
|
||||
def make_visualizer(kind, **kwargs):
|
||||
logging.info(f'Make visualizer {kind}')
|
||||
|
||||
if kind == 'directory':
|
||||
return DirectoryVisualizer(**kwargs)
|
||||
if kind == 'noop':
|
||||
return NoopVisualizer()
|
||||
|
||||
raise ValueError(f'Unknown visualizer kind {kind}')
|
||||
@@ -0,0 +1,73 @@
|
||||
import abc
|
||||
from typing import Dict, List
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
from skimage import color
|
||||
from skimage.segmentation import mark_boundaries
|
||||
|
||||
from . import colors
|
||||
|
||||
COLORS, _ = colors.generate_colors(151) # 151 - max classes for semantic segmentation
|
||||
|
||||
|
||||
class BaseVisualizer:
|
||||
@abc.abstractmethod
|
||||
def __call__(self, epoch_i, batch_i, batch, suffix='', rank=None):
|
||||
"""
|
||||
Take a batch, make an image from it and visualize
|
||||
"""
|
||||
raise NotImplementedError()
|
||||
|
||||
|
||||
def visualize_mask_and_images(images_dict: Dict[str, np.ndarray], keys: List[str],
|
||||
last_without_mask=True, rescale_keys=None, mask_only_first=None,
|
||||
black_mask=False) -> np.ndarray:
|
||||
mask = images_dict['mask'] > 0.5
|
||||
result = []
|
||||
for i, k in enumerate(keys):
|
||||
img = images_dict[k]
|
||||
img = np.transpose(img, (1, 2, 0))
|
||||
|
||||
if rescale_keys is not None and k in rescale_keys:
|
||||
img = img - img.min()
|
||||
img /= img.max() + 1e-5
|
||||
if len(img.shape) == 2:
|
||||
img = np.expand_dims(img, 2)
|
||||
|
||||
if img.shape[2] == 1:
|
||||
img = np.repeat(img, 3, axis=2)
|
||||
elif (img.shape[2] > 3):
|
||||
img_classes = img.argmax(2)
|
||||
img = color.label2rgb(img_classes, colors=COLORS)
|
||||
|
||||
if mask_only_first:
|
||||
need_mark_boundaries = i == 0
|
||||
else:
|
||||
need_mark_boundaries = i < len(keys) - 1 or not last_without_mask
|
||||
|
||||
if need_mark_boundaries:
|
||||
if black_mask:
|
||||
img = img * (1 - mask[0][..., None])
|
||||
img = mark_boundaries(img,
|
||||
mask[0],
|
||||
color=(1., 0., 0.),
|
||||
outline_color=(1., 1., 1.),
|
||||
mode='thick')
|
||||
result.append(img)
|
||||
return np.concatenate(result, axis=1)
|
||||
|
||||
|
||||
def visualize_mask_and_images_batch(batch: Dict[str, torch.Tensor], keys: List[str], max_items=10,
|
||||
last_without_mask=True, rescale_keys=None) -> np.ndarray:
|
||||
batch = {k: tens.detach().cpu().numpy() for k, tens in batch.items()
|
||||
if k in keys or k == 'mask'}
|
||||
|
||||
batch_size = next(iter(batch.values())).shape[0]
|
||||
items_to_vis = min(batch_size, max_items)
|
||||
result = []
|
||||
for i in range(items_to_vis):
|
||||
cur_dct = {k: tens[i] for k, tens in batch.items()}
|
||||
result.append(visualize_mask_and_images(cur_dct, keys, last_without_mask=last_without_mask,
|
||||
rescale_keys=rescale_keys))
|
||||
return np.concatenate(result, axis=0)
|
||||
@@ -0,0 +1,76 @@
|
||||
import random
|
||||
import colorsys
|
||||
|
||||
import numpy as np
|
||||
import matplotlib
|
||||
matplotlib.use('agg')
|
||||
import matplotlib.pyplot as plt
|
||||
from matplotlib.colors import LinearSegmentedColormap
|
||||
|
||||
|
||||
def generate_colors(nlabels, type='bright', first_color_black=False, last_color_black=True, verbose=False):
|
||||
# https://stackoverflow.com/questions/14720331/how-to-generate-random-colors-in-matplotlib
|
||||
"""
|
||||
Creates a random colormap to be used together with matplotlib. Useful for segmentation tasks
|
||||
:param nlabels: Number of labels (size of colormap)
|
||||
:param type: 'bright' for strong colors, 'soft' for pastel colors
|
||||
:param first_color_black: Option to use first color as black, True or False
|
||||
:param last_color_black: Option to use last color as black, True or False
|
||||
:param verbose: Prints the number of labels and shows the colormap. True or False
|
||||
:return: colormap for matplotlib
|
||||
"""
|
||||
if type not in ('bright', 'soft'):
|
||||
print ('Please choose "bright" or "soft" for type')
|
||||
return
|
||||
|
||||
if verbose:
|
||||
print('Number of labels: ' + str(nlabels))
|
||||
|
||||
# Generate color map for bright colors, based on hsv
|
||||
if type == 'bright':
|
||||
randHSVcolors = [(np.random.uniform(low=0.0, high=1),
|
||||
np.random.uniform(low=0.2, high=1),
|
||||
np.random.uniform(low=0.9, high=1)) for i in range(nlabels)]
|
||||
|
||||
# Convert HSV list to RGB
|
||||
randRGBcolors = []
|
||||
for HSVcolor in randHSVcolors:
|
||||
randRGBcolors.append(colorsys.hsv_to_rgb(HSVcolor[0], HSVcolor[1], HSVcolor[2]))
|
||||
|
||||
if first_color_black:
|
||||
randRGBcolors[0] = [0, 0, 0]
|
||||
|
||||
if last_color_black:
|
||||
randRGBcolors[-1] = [0, 0, 0]
|
||||
|
||||
random_colormap = LinearSegmentedColormap.from_list('new_map', randRGBcolors, N=nlabels)
|
||||
|
||||
# Generate soft pastel colors, by limiting the RGB spectrum
|
||||
if type == 'soft':
|
||||
low = 0.6
|
||||
high = 0.95
|
||||
randRGBcolors = [(np.random.uniform(low=low, high=high),
|
||||
np.random.uniform(low=low, high=high),
|
||||
np.random.uniform(low=low, high=high)) for i in range(nlabels)]
|
||||
|
||||
if first_color_black:
|
||||
randRGBcolors[0] = [0, 0, 0]
|
||||
|
||||
if last_color_black:
|
||||
randRGBcolors[-1] = [0, 0, 0]
|
||||
random_colormap = LinearSegmentedColormap.from_list('new_map', randRGBcolors, N=nlabels)
|
||||
|
||||
# Display colorbar
|
||||
if verbose:
|
||||
from matplotlib import colors, colorbar
|
||||
from matplotlib import pyplot as plt
|
||||
fig, ax = plt.subplots(1, 1, figsize=(15, 0.5))
|
||||
|
||||
bounds = np.linspace(0, nlabels, nlabels + 1)
|
||||
norm = colors.BoundaryNorm(bounds, nlabels)
|
||||
|
||||
cb = colorbar.ColorbarBase(ax, cmap=random_colormap, norm=norm, spacing='proportional', ticks=None,
|
||||
boundaries=bounds, format='%1i', orientation=u'horizontal')
|
||||
|
||||
return randRGBcolors, random_colormap
|
||||
|
||||
@@ -0,0 +1,36 @@
|
||||
import os
|
||||
|
||||
import cv2
|
||||
import numpy as np
|
||||
|
||||
from annotator.lama.saicinpainting.training.visualizers.base import BaseVisualizer, visualize_mask_and_images_batch
|
||||
from annotator.lama.saicinpainting.utils import check_and_warn_input_range
|
||||
|
||||
|
||||
class DirectoryVisualizer(BaseVisualizer):
|
||||
DEFAULT_KEY_ORDER = 'image predicted_image inpainted'.split(' ')
|
||||
|
||||
def __init__(self, outdir, key_order=DEFAULT_KEY_ORDER, max_items_in_batch=10,
|
||||
last_without_mask=True, rescale_keys=None):
|
||||
self.outdir = outdir
|
||||
os.makedirs(self.outdir, exist_ok=True)
|
||||
self.key_order = key_order
|
||||
self.max_items_in_batch = max_items_in_batch
|
||||
self.last_without_mask = last_without_mask
|
||||
self.rescale_keys = rescale_keys
|
||||
|
||||
def __call__(self, epoch_i, batch_i, batch, suffix='', rank=None):
|
||||
check_and_warn_input_range(batch['image'], 0, 1, 'DirectoryVisualizer target image')
|
||||
vis_img = visualize_mask_and_images_batch(batch, self.key_order, max_items=self.max_items_in_batch,
|
||||
last_without_mask=self.last_without_mask,
|
||||
rescale_keys=self.rescale_keys)
|
||||
|
||||
vis_img = np.clip(vis_img * 255, 0, 255).astype('uint8')
|
||||
|
||||
curoutdir = os.path.join(self.outdir, f'epoch{epoch_i:04d}{suffix}')
|
||||
os.makedirs(curoutdir, exist_ok=True)
|
||||
rank_suffix = f'_r{rank}' if rank is not None else ''
|
||||
out_fname = os.path.join(curoutdir, f'batch{batch_i:07d}{rank_suffix}.jpg')
|
||||
|
||||
vis_img = cv2.cvtColor(vis_img, cv2.COLOR_RGB2BGR)
|
||||
cv2.imwrite(out_fname, vis_img)
|
||||
@@ -0,0 +1,9 @@
|
||||
from annotator.lama.saicinpainting.training.visualizers.base import BaseVisualizer
|
||||
|
||||
|
||||
class NoopVisualizer(BaseVisualizer):
|
||||
def __init__(self, *args, **kwargs):
|
||||
pass
|
||||
|
||||
def __call__(self, epoch_i, batch_i, batch, suffix='', rank=None):
|
||||
pass
|
||||
@@ -0,0 +1,174 @@
|
||||
import bisect
|
||||
import functools
|
||||
import logging
|
||||
import numbers
|
||||
import os
|
||||
import signal
|
||||
import sys
|
||||
import traceback
|
||||
import warnings
|
||||
|
||||
import torch
|
||||
from pytorch_lightning import seed_everything
|
||||
|
||||
LOGGER = logging.getLogger(__name__)
|
||||
|
||||
|
||||
def check_and_warn_input_range(tensor, min_value, max_value, name):
|
||||
actual_min = tensor.min()
|
||||
actual_max = tensor.max()
|
||||
if actual_min < min_value or actual_max > max_value:
|
||||
warnings.warn(f"{name} must be in {min_value}..{max_value} range, but it ranges {actual_min}..{actual_max}")
|
||||
|
||||
|
||||
def sum_dict_with_prefix(target, cur_dict, prefix, default=0):
|
||||
for k, v in cur_dict.items():
|
||||
target_key = prefix + k
|
||||
target[target_key] = target.get(target_key, default) + v
|
||||
|
||||
|
||||
def average_dicts(dict_list):
|
||||
result = {}
|
||||
norm = 1e-3
|
||||
for dct in dict_list:
|
||||
sum_dict_with_prefix(result, dct, '')
|
||||
norm += 1
|
||||
for k in list(result):
|
||||
result[k] /= norm
|
||||
return result
|
||||
|
||||
|
||||
def add_prefix_to_keys(dct, prefix):
|
||||
return {prefix + k: v for k, v in dct.items()}
|
||||
|
||||
|
||||
def set_requires_grad(module, value):
|
||||
for param in module.parameters():
|
||||
param.requires_grad = value
|
||||
|
||||
|
||||
def flatten_dict(dct):
|
||||
result = {}
|
||||
for k, v in dct.items():
|
||||
if isinstance(k, tuple):
|
||||
k = '_'.join(k)
|
||||
if isinstance(v, dict):
|
||||
for sub_k, sub_v in flatten_dict(v).items():
|
||||
result[f'{k}_{sub_k}'] = sub_v
|
||||
else:
|
||||
result[k] = v
|
||||
return result
|
||||
|
||||
|
||||
class LinearRamp:
|
||||
def __init__(self, start_value=0, end_value=1, start_iter=-1, end_iter=0):
|
||||
self.start_value = start_value
|
||||
self.end_value = end_value
|
||||
self.start_iter = start_iter
|
||||
self.end_iter = end_iter
|
||||
|
||||
def __call__(self, i):
|
||||
if i < self.start_iter:
|
||||
return self.start_value
|
||||
if i >= self.end_iter:
|
||||
return self.end_value
|
||||
part = (i - self.start_iter) / (self.end_iter - self.start_iter)
|
||||
return self.start_value * (1 - part) + self.end_value * part
|
||||
|
||||
|
||||
class LadderRamp:
|
||||
def __init__(self, start_iters, values):
|
||||
self.start_iters = start_iters
|
||||
self.values = values
|
||||
assert len(values) == len(start_iters) + 1, (len(values), len(start_iters))
|
||||
|
||||
def __call__(self, i):
|
||||
segment_i = bisect.bisect_right(self.start_iters, i)
|
||||
return self.values[segment_i]
|
||||
|
||||
|
||||
def get_ramp(kind='ladder', **kwargs):
|
||||
if kind == 'linear':
|
||||
return LinearRamp(**kwargs)
|
||||
if kind == 'ladder':
|
||||
return LadderRamp(**kwargs)
|
||||
raise ValueError(f'Unexpected ramp kind: {kind}')
|
||||
|
||||
|
||||
def print_traceback_handler(sig, frame):
|
||||
LOGGER.warning(f'Received signal {sig}')
|
||||
bt = ''.join(traceback.format_stack())
|
||||
LOGGER.warning(f'Requested stack trace:\n{bt}')
|
||||
|
||||
|
||||
def register_debug_signal_handlers(sig=None, handler=print_traceback_handler):
|
||||
LOGGER.warning(f'Setting signal {sig} handler {handler}')
|
||||
signal.signal(sig, handler)
|
||||
|
||||
|
||||
def handle_deterministic_config(config):
|
||||
seed = dict(config).get('seed', None)
|
||||
if seed is None:
|
||||
return False
|
||||
|
||||
seed_everything(seed)
|
||||
return True
|
||||
|
||||
|
||||
def get_shape(t):
|
||||
if torch.is_tensor(t):
|
||||
return tuple(t.shape)
|
||||
elif isinstance(t, dict):
|
||||
return {n: get_shape(q) for n, q in t.items()}
|
||||
elif isinstance(t, (list, tuple)):
|
||||
return [get_shape(q) for q in t]
|
||||
elif isinstance(t, numbers.Number):
|
||||
return type(t)
|
||||
else:
|
||||
raise ValueError('unexpected type {}'.format(type(t)))
|
||||
|
||||
|
||||
def get_has_ddp_rank():
|
||||
master_port = os.environ.get('MASTER_PORT', None)
|
||||
node_rank = os.environ.get('NODE_RANK', None)
|
||||
local_rank = os.environ.get('LOCAL_RANK', None)
|
||||
world_size = os.environ.get('WORLD_SIZE', None)
|
||||
has_rank = master_port is not None or node_rank is not None or local_rank is not None or world_size is not None
|
||||
return has_rank
|
||||
|
||||
|
||||
def handle_ddp_subprocess():
|
||||
def main_decorator(main_func):
|
||||
@functools.wraps(main_func)
|
||||
def new_main(*args, **kwargs):
|
||||
# Trainer sets MASTER_PORT, NODE_RANK, LOCAL_RANK, WORLD_SIZE
|
||||
parent_cwd = os.environ.get('TRAINING_PARENT_WORK_DIR', None)
|
||||
has_parent = parent_cwd is not None
|
||||
has_rank = get_has_ddp_rank()
|
||||
assert has_parent == has_rank, f'Inconsistent state: has_parent={has_parent}, has_rank={has_rank}'
|
||||
|
||||
if has_parent:
|
||||
# we are in the worker
|
||||
sys.argv.extend([
|
||||
f'hydra.run.dir={parent_cwd}',
|
||||
# 'hydra/hydra_logging=disabled',
|
||||
# 'hydra/job_logging=disabled'
|
||||
])
|
||||
# do nothing if this is a top-level process
|
||||
# TRAINING_PARENT_WORK_DIR is set in handle_ddp_parent_process after hydra initialization
|
||||
|
||||
main_func(*args, **kwargs)
|
||||
return new_main
|
||||
return main_decorator
|
||||
|
||||
|
||||
def handle_ddp_parent_process():
|
||||
parent_cwd = os.environ.get('TRAINING_PARENT_WORK_DIR', None)
|
||||
has_parent = parent_cwd is not None
|
||||
has_rank = get_has_ddp_rank()
|
||||
assert has_parent == has_rank, f'Inconsistent state: has_parent={has_parent}, has_rank={has_rank}'
|
||||
|
||||
if parent_cwd is None:
|
||||
os.environ['TRAINING_PARENT_WORK_DIR'] = os.getcwd()
|
||||
|
||||
return has_parent
|
||||
@@ -0,0 +1,113 @@
|
||||
import cv2
|
||||
import numpy as np
|
||||
import torch
|
||||
import os
|
||||
from modules import devices, shared
|
||||
from annotator.annotator_path import models_path
|
||||
from torchvision.transforms import transforms
|
||||
|
||||
# AdelaiDepth/LeReS imports
|
||||
from .leres.depthmap import estimateleres, estimateboost
|
||||
from .leres.multi_depth_model_woauxi import RelDepthModel
|
||||
from .leres.net_tools import strip_prefix_if_present
|
||||
|
||||
# pix2pix/merge net imports
|
||||
from .pix2pix.options.test_options import TestOptions
|
||||
from .pix2pix.models.pix2pix4depth_model import Pix2Pix4DepthModel
|
||||
|
||||
base_model_path = os.path.join(models_path, "leres")
|
||||
old_modeldir = os.path.dirname(os.path.realpath(__file__))
|
||||
|
||||
remote_model_path_leres = "https://huggingface.co/lllyasviel/Annotators/resolve/main/res101.pth"
|
||||
remote_model_path_pix2pix = "https://huggingface.co/lllyasviel/Annotators/resolve/main/latest_net_G.pth"
|
||||
|
||||
model = None
|
||||
pix2pixmodel = None
|
||||
|
||||
def unload_leres_model():
|
||||
global model, pix2pixmodel
|
||||
if model is not None:
|
||||
model = model.cpu()
|
||||
if pix2pixmodel is not None:
|
||||
pix2pixmodel = pix2pixmodel.unload_network('G')
|
||||
|
||||
|
||||
def apply_leres(input_image, thr_a, thr_b, boost=False):
|
||||
global model, pix2pixmodel
|
||||
if model is None:
|
||||
model_path = os.path.join(base_model_path, "res101.pth")
|
||||
old_model_path = os.path.join(old_modeldir, "res101.pth")
|
||||
|
||||
if os.path.exists(old_model_path):
|
||||
model_path = old_model_path
|
||||
elif not os.path.exists(model_path):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path_leres, model_dir=base_model_path)
|
||||
|
||||
if torch.cuda.is_available():
|
||||
checkpoint = torch.load(model_path)
|
||||
else:
|
||||
checkpoint = torch.load(model_path, map_location=torch.device('cpu'))
|
||||
|
||||
model = RelDepthModel(backbone='resnext101')
|
||||
model.load_state_dict(strip_prefix_if_present(checkpoint['depth_model'], "module."), strict=True)
|
||||
del checkpoint
|
||||
|
||||
if boost and pix2pixmodel is None:
|
||||
pix2pixmodel_path = os.path.join(base_model_path, "latest_net_G.pth")
|
||||
if not os.path.exists(pix2pixmodel_path):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path_pix2pix, model_dir=base_model_path)
|
||||
|
||||
opt = TestOptions().parse()
|
||||
if not torch.cuda.is_available():
|
||||
opt.gpu_ids = [] # cpu mode
|
||||
pix2pixmodel = Pix2Pix4DepthModel(opt)
|
||||
pix2pixmodel.save_dir = base_model_path
|
||||
pix2pixmodel.load_networks('latest')
|
||||
pix2pixmodel.eval()
|
||||
|
||||
if devices.get_device_for("controlnet").type != 'mps':
|
||||
model = model.to(devices.get_device_for("controlnet"))
|
||||
|
||||
assert input_image.ndim == 3
|
||||
height, width, dim = input_image.shape
|
||||
|
||||
with torch.no_grad():
|
||||
|
||||
if boost:
|
||||
depth = estimateboost(input_image, model, 0, pix2pixmodel, max(width, height))
|
||||
else:
|
||||
depth = estimateleres(input_image, model, width, height)
|
||||
|
||||
numbytes=2
|
||||
depth_min = depth.min()
|
||||
depth_max = depth.max()
|
||||
max_val = (2**(8*numbytes))-1
|
||||
|
||||
# check output before normalizing and mapping to 16 bit
|
||||
if depth_max - depth_min > np.finfo("float").eps:
|
||||
out = max_val * (depth - depth_min) / (depth_max - depth_min)
|
||||
else:
|
||||
out = np.zeros(depth.shape)
|
||||
|
||||
# single channel, 16 bit image
|
||||
depth_image = out.astype("uint16")
|
||||
|
||||
# convert to uint8
|
||||
depth_image = cv2.convertScaleAbs(depth_image, alpha=(255.0/65535.0))
|
||||
|
||||
# remove near
|
||||
if thr_a != 0:
|
||||
thr_a = ((thr_a/100)*255)
|
||||
depth_image = cv2.threshold(depth_image, thr_a, 255, cv2.THRESH_TOZERO)[1]
|
||||
|
||||
# invert image
|
||||
depth_image = cv2.bitwise_not(depth_image)
|
||||
|
||||
# remove bg
|
||||
if thr_b != 0:
|
||||
thr_b = ((thr_b/100)*255)
|
||||
depth_image = cv2.threshold(depth_image, thr_b, 255, cv2.THRESH_TOZERO)[1]
|
||||
|
||||
return depth_image
|
||||
@@ -0,0 +1,23 @@
|
||||
https://github.com/thygate/stable-diffusion-webui-depthmap-script
|
||||
|
||||
MIT License
|
||||
|
||||
Copyright (c) 2023 Bob Thiry
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
@@ -0,0 +1,199 @@
|
||||
import torch.nn as nn
|
||||
import torch.nn as NN
|
||||
|
||||
__all__ = ['ResNet', 'resnet18', 'resnet34', 'resnet50', 'resnet101',
|
||||
'resnet152']
|
||||
|
||||
|
||||
model_urls = {
|
||||
'resnet18': 'https://download.pytorch.org/models/resnet18-5c106cde.pth',
|
||||
'resnet34': 'https://download.pytorch.org/models/resnet34-333f7ec4.pth',
|
||||
'resnet50': 'https://download.pytorch.org/models/resnet50-19c8e357.pth',
|
||||
'resnet101': 'https://download.pytorch.org/models/resnet101-5d3b4d8f.pth',
|
||||
'resnet152': 'https://download.pytorch.org/models/resnet152-b121ed2d.pth',
|
||||
}
|
||||
|
||||
|
||||
def conv3x3(in_planes, out_planes, stride=1):
|
||||
"""3x3 convolution with padding"""
|
||||
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
|
||||
padding=1, bias=False)
|
||||
|
||||
|
||||
class BasicBlock(nn.Module):
|
||||
expansion = 1
|
||||
|
||||
def __init__(self, inplanes, planes, stride=1, downsample=None):
|
||||
super(BasicBlock, self).__init__()
|
||||
self.conv1 = conv3x3(inplanes, planes, stride)
|
||||
self.bn1 = NN.BatchNorm2d(planes) #NN.BatchNorm2d
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
self.conv2 = conv3x3(planes, planes)
|
||||
self.bn2 = NN.BatchNorm2d(planes) #NN.BatchNorm2d
|
||||
self.downsample = downsample
|
||||
self.stride = stride
|
||||
|
||||
def forward(self, x):
|
||||
residual = x
|
||||
|
||||
out = self.conv1(x)
|
||||
out = self.bn1(out)
|
||||
out = self.relu(out)
|
||||
|
||||
out = self.conv2(out)
|
||||
out = self.bn2(out)
|
||||
|
||||
if self.downsample is not None:
|
||||
residual = self.downsample(x)
|
||||
|
||||
out += residual
|
||||
out = self.relu(out)
|
||||
|
||||
return out
|
||||
|
||||
|
||||
class Bottleneck(nn.Module):
|
||||
expansion = 4
|
||||
|
||||
def __init__(self, inplanes, planes, stride=1, downsample=None):
|
||||
super(Bottleneck, self).__init__()
|
||||
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
|
||||
self.bn1 = NN.BatchNorm2d(planes) #NN.BatchNorm2d
|
||||
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
|
||||
padding=1, bias=False)
|
||||
self.bn2 = NN.BatchNorm2d(planes) #NN.BatchNorm2d
|
||||
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1, bias=False)
|
||||
self.bn3 = NN.BatchNorm2d(planes * self.expansion) #NN.BatchNorm2d
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
self.downsample = downsample
|
||||
self.stride = stride
|
||||
|
||||
def forward(self, x):
|
||||
residual = x
|
||||
|
||||
out = self.conv1(x)
|
||||
out = self.bn1(out)
|
||||
out = self.relu(out)
|
||||
|
||||
out = self.conv2(out)
|
||||
out = self.bn2(out)
|
||||
out = self.relu(out)
|
||||
|
||||
out = self.conv3(out)
|
||||
out = self.bn3(out)
|
||||
|
||||
if self.downsample is not None:
|
||||
residual = self.downsample(x)
|
||||
|
||||
out += residual
|
||||
out = self.relu(out)
|
||||
|
||||
return out
|
||||
|
||||
|
||||
class ResNet(nn.Module):
|
||||
|
||||
def __init__(self, block, layers, num_classes=1000):
|
||||
self.inplanes = 64
|
||||
super(ResNet, self).__init__()
|
||||
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
|
||||
bias=False)
|
||||
self.bn1 = NN.BatchNorm2d(64) #NN.BatchNorm2d
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
|
||||
self.layer1 = self._make_layer(block, 64, layers[0])
|
||||
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
|
||||
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
|
||||
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
|
||||
#self.avgpool = nn.AvgPool2d(7, stride=1)
|
||||
#self.fc = nn.Linear(512 * block.expansion, num_classes)
|
||||
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
|
||||
elif isinstance(m, nn.BatchNorm2d):
|
||||
nn.init.constant_(m.weight, 1)
|
||||
nn.init.constant_(m.bias, 0)
|
||||
|
||||
def _make_layer(self, block, planes, blocks, stride=1):
|
||||
downsample = None
|
||||
if stride != 1 or self.inplanes != planes * block.expansion:
|
||||
downsample = nn.Sequential(
|
||||
nn.Conv2d(self.inplanes, planes * block.expansion,
|
||||
kernel_size=1, stride=stride, bias=False),
|
||||
NN.BatchNorm2d(planes * block.expansion), #NN.BatchNorm2d
|
||||
)
|
||||
|
||||
layers = []
|
||||
layers.append(block(self.inplanes, planes, stride, downsample))
|
||||
self.inplanes = planes * block.expansion
|
||||
for i in range(1, blocks):
|
||||
layers.append(block(self.inplanes, planes))
|
||||
|
||||
return nn.Sequential(*layers)
|
||||
|
||||
def forward(self, x):
|
||||
features = []
|
||||
|
||||
x = self.conv1(x)
|
||||
x = self.bn1(x)
|
||||
x = self.relu(x)
|
||||
x = self.maxpool(x)
|
||||
|
||||
x = self.layer1(x)
|
||||
features.append(x)
|
||||
x = self.layer2(x)
|
||||
features.append(x)
|
||||
x = self.layer3(x)
|
||||
features.append(x)
|
||||
x = self.layer4(x)
|
||||
features.append(x)
|
||||
|
||||
return features
|
||||
|
||||
|
||||
def resnet18(pretrained=True, **kwargs):
|
||||
"""Constructs a ResNet-18 model.
|
||||
Args:
|
||||
pretrained (bool): If True, returns a model pre-trained on ImageNet
|
||||
"""
|
||||
model = ResNet(BasicBlock, [2, 2, 2, 2], **kwargs)
|
||||
return model
|
||||
|
||||
|
||||
def resnet34(pretrained=True, **kwargs):
|
||||
"""Constructs a ResNet-34 model.
|
||||
Args:
|
||||
pretrained (bool): If True, returns a model pre-trained on ImageNet
|
||||
"""
|
||||
model = ResNet(BasicBlock, [3, 4, 6, 3], **kwargs)
|
||||
return model
|
||||
|
||||
|
||||
def resnet50(pretrained=True, **kwargs):
|
||||
"""Constructs a ResNet-50 model.
|
||||
Args:
|
||||
pretrained (bool): If True, returns a model pre-trained on ImageNet
|
||||
"""
|
||||
model = ResNet(Bottleneck, [3, 4, 6, 3], **kwargs)
|
||||
|
||||
return model
|
||||
|
||||
|
||||
def resnet101(pretrained=True, **kwargs):
|
||||
"""Constructs a ResNet-101 model.
|
||||
Args:
|
||||
pretrained (bool): If True, returns a model pre-trained on ImageNet
|
||||
"""
|
||||
model = ResNet(Bottleneck, [3, 4, 23, 3], **kwargs)
|
||||
|
||||
return model
|
||||
|
||||
|
||||
def resnet152(pretrained=True, **kwargs):
|
||||
"""Constructs a ResNet-152 model.
|
||||
Args:
|
||||
pretrained (bool): If True, returns a model pre-trained on ImageNet
|
||||
"""
|
||||
model = ResNet(Bottleneck, [3, 8, 36, 3], **kwargs)
|
||||
return model
|
||||
@@ -0,0 +1,237 @@
|
||||
#!/usr/bin/env python
|
||||
# coding: utf-8
|
||||
import torch.nn as nn
|
||||
|
||||
try:
|
||||
from urllib import urlretrieve
|
||||
except ImportError:
|
||||
from urllib.request import urlretrieve
|
||||
|
||||
__all__ = ['resnext101_32x8d']
|
||||
|
||||
|
||||
model_urls = {
|
||||
'resnext50_32x4d': 'https://download.pytorch.org/models/resnext50_32x4d-7cdf4587.pth',
|
||||
'resnext101_32x8d': 'https://download.pytorch.org/models/resnext101_32x8d-8ba56ff5.pth',
|
||||
}
|
||||
|
||||
|
||||
def conv3x3(in_planes, out_planes, stride=1, groups=1, dilation=1):
|
||||
"""3x3 convolution with padding"""
|
||||
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
|
||||
padding=dilation, groups=groups, bias=False, dilation=dilation)
|
||||
|
||||
|
||||
def conv1x1(in_planes, out_planes, stride=1):
|
||||
"""1x1 convolution"""
|
||||
return nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=stride, bias=False)
|
||||
|
||||
|
||||
class BasicBlock(nn.Module):
|
||||
expansion = 1
|
||||
|
||||
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
|
||||
base_width=64, dilation=1, norm_layer=None):
|
||||
super(BasicBlock, self).__init__()
|
||||
if norm_layer is None:
|
||||
norm_layer = nn.BatchNorm2d
|
||||
if groups != 1 or base_width != 64:
|
||||
raise ValueError('BasicBlock only supports groups=1 and base_width=64')
|
||||
if dilation > 1:
|
||||
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
|
||||
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
|
||||
self.conv1 = conv3x3(inplanes, planes, stride)
|
||||
self.bn1 = norm_layer(planes)
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
self.conv2 = conv3x3(planes, planes)
|
||||
self.bn2 = norm_layer(planes)
|
||||
self.downsample = downsample
|
||||
self.stride = stride
|
||||
|
||||
def forward(self, x):
|
||||
identity = x
|
||||
|
||||
out = self.conv1(x)
|
||||
out = self.bn1(out)
|
||||
out = self.relu(out)
|
||||
|
||||
out = self.conv2(out)
|
||||
out = self.bn2(out)
|
||||
|
||||
if self.downsample is not None:
|
||||
identity = self.downsample(x)
|
||||
|
||||
out += identity
|
||||
out = self.relu(out)
|
||||
|
||||
return out
|
||||
|
||||
|
||||
class Bottleneck(nn.Module):
|
||||
# Bottleneck in torchvision places the stride for downsampling at 3x3 convolution(self.conv2)
|
||||
# while original implementation places the stride at the first 1x1 convolution(self.conv1)
|
||||
# according to "Deep residual learning for image recognition"https://arxiv.org/abs/1512.03385.
|
||||
# This variant is also known as ResNet V1.5 and improves accuracy according to
|
||||
# https://ngc.nvidia.com/catalog/model-scripts/nvidia:resnet_50_v1_5_for_pytorch.
|
||||
|
||||
expansion = 4
|
||||
|
||||
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
|
||||
base_width=64, dilation=1, norm_layer=None):
|
||||
super(Bottleneck, self).__init__()
|
||||
if norm_layer is None:
|
||||
norm_layer = nn.BatchNorm2d
|
||||
width = int(planes * (base_width / 64.)) * groups
|
||||
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
|
||||
self.conv1 = conv1x1(inplanes, width)
|
||||
self.bn1 = norm_layer(width)
|
||||
self.conv2 = conv3x3(width, width, stride, groups, dilation)
|
||||
self.bn2 = norm_layer(width)
|
||||
self.conv3 = conv1x1(width, planes * self.expansion)
|
||||
self.bn3 = norm_layer(planes * self.expansion)
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
self.downsample = downsample
|
||||
self.stride = stride
|
||||
|
||||
def forward(self, x):
|
||||
identity = x
|
||||
|
||||
out = self.conv1(x)
|
||||
out = self.bn1(out)
|
||||
out = self.relu(out)
|
||||
|
||||
out = self.conv2(out)
|
||||
out = self.bn2(out)
|
||||
out = self.relu(out)
|
||||
|
||||
out = self.conv3(out)
|
||||
out = self.bn3(out)
|
||||
|
||||
if self.downsample is not None:
|
||||
identity = self.downsample(x)
|
||||
|
||||
out += identity
|
||||
out = self.relu(out)
|
||||
|
||||
return out
|
||||
|
||||
|
||||
class ResNet(nn.Module):
|
||||
|
||||
def __init__(self, block, layers, num_classes=1000, zero_init_residual=False,
|
||||
groups=1, width_per_group=64, replace_stride_with_dilation=None,
|
||||
norm_layer=None):
|
||||
super(ResNet, self).__init__()
|
||||
if norm_layer is None:
|
||||
norm_layer = nn.BatchNorm2d
|
||||
self._norm_layer = norm_layer
|
||||
|
||||
self.inplanes = 64
|
||||
self.dilation = 1
|
||||
if replace_stride_with_dilation is None:
|
||||
# each element in the tuple indicates if we should replace
|
||||
# the 2x2 stride with a dilated convolution instead
|
||||
replace_stride_with_dilation = [False, False, False]
|
||||
if len(replace_stride_with_dilation) != 3:
|
||||
raise ValueError("replace_stride_with_dilation should be None "
|
||||
"or a 3-element tuple, got {}".format(replace_stride_with_dilation))
|
||||
self.groups = groups
|
||||
self.base_width = width_per_group
|
||||
self.conv1 = nn.Conv2d(3, self.inplanes, kernel_size=7, stride=2, padding=3,
|
||||
bias=False)
|
||||
self.bn1 = norm_layer(self.inplanes)
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
|
||||
self.layer1 = self._make_layer(block, 64, layers[0])
|
||||
self.layer2 = self._make_layer(block, 128, layers[1], stride=2,
|
||||
dilate=replace_stride_with_dilation[0])
|
||||
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
|
||||
dilate=replace_stride_with_dilation[1])
|
||||
self.layer4 = self._make_layer(block, 512, layers[3], stride=2,
|
||||
dilate=replace_stride_with_dilation[2])
|
||||
#self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
|
||||
#self.fc = nn.Linear(512 * block.expansion, num_classes)
|
||||
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
|
||||
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
|
||||
nn.init.constant_(m.weight, 1)
|
||||
nn.init.constant_(m.bias, 0)
|
||||
|
||||
# Zero-initialize the last BN in each residual branch,
|
||||
# so that the residual branch starts with zeros, and each residual block behaves like an identity.
|
||||
# This improves the model by 0.2~0.3% according to https://arxiv.org/abs/1706.02677
|
||||
if zero_init_residual:
|
||||
for m in self.modules():
|
||||
if isinstance(m, Bottleneck):
|
||||
nn.init.constant_(m.bn3.weight, 0)
|
||||
elif isinstance(m, BasicBlock):
|
||||
nn.init.constant_(m.bn2.weight, 0)
|
||||
|
||||
def _make_layer(self, block, planes, blocks, stride=1, dilate=False):
|
||||
norm_layer = self._norm_layer
|
||||
downsample = None
|
||||
previous_dilation = self.dilation
|
||||
if dilate:
|
||||
self.dilation *= stride
|
||||
stride = 1
|
||||
if stride != 1 or self.inplanes != planes * block.expansion:
|
||||
downsample = nn.Sequential(
|
||||
conv1x1(self.inplanes, planes * block.expansion, stride),
|
||||
norm_layer(planes * block.expansion),
|
||||
)
|
||||
|
||||
layers = []
|
||||
layers.append(block(self.inplanes, planes, stride, downsample, self.groups,
|
||||
self.base_width, previous_dilation, norm_layer))
|
||||
self.inplanes = planes * block.expansion
|
||||
for _ in range(1, blocks):
|
||||
layers.append(block(self.inplanes, planes, groups=self.groups,
|
||||
base_width=self.base_width, dilation=self.dilation,
|
||||
norm_layer=norm_layer))
|
||||
|
||||
return nn.Sequential(*layers)
|
||||
|
||||
def _forward_impl(self, x):
|
||||
# See note [TorchScript super()]
|
||||
features = []
|
||||
x = self.conv1(x)
|
||||
x = self.bn1(x)
|
||||
x = self.relu(x)
|
||||
x = self.maxpool(x)
|
||||
|
||||
x = self.layer1(x)
|
||||
features.append(x)
|
||||
|
||||
x = self.layer2(x)
|
||||
features.append(x)
|
||||
|
||||
x = self.layer3(x)
|
||||
features.append(x)
|
||||
|
||||
x = self.layer4(x)
|
||||
features.append(x)
|
||||
|
||||
#x = self.avgpool(x)
|
||||
#x = torch.flatten(x, 1)
|
||||
#x = self.fc(x)
|
||||
|
||||
return features
|
||||
|
||||
def forward(self, x):
|
||||
return self._forward_impl(x)
|
||||
|
||||
|
||||
|
||||
def resnext101_32x8d(pretrained=True, **kwargs):
|
||||
"""Constructs a ResNet-152 model.
|
||||
Args:
|
||||
pretrained (bool): If True, returns a model pre-trained on ImageNet
|
||||
"""
|
||||
kwargs['groups'] = 32
|
||||
kwargs['width_per_group'] = 8
|
||||
|
||||
model = ResNet(Bottleneck, [3, 4, 23, 3], **kwargs)
|
||||
return model
|
||||
|
||||
@@ -0,0 +1,546 @@
|
||||
# Author: thygate
|
||||
# https://github.com/thygate/stable-diffusion-webui-depthmap-script
|
||||
|
||||
from modules import devices
|
||||
from modules.shared import opts
|
||||
from torchvision.transforms import transforms
|
||||
from operator import getitem
|
||||
|
||||
import torch, gc
|
||||
import cv2
|
||||
import numpy as np
|
||||
import skimage.measure
|
||||
|
||||
whole_size_threshold = 1600 # R_max from the paper
|
||||
pix2pixsize = 1024
|
||||
|
||||
def scale_torch(img):
|
||||
"""
|
||||
Scale the image and output it in torch.tensor.
|
||||
:param img: input rgb is in shape [H, W, C], input depth/disp is in shape [H, W]
|
||||
:param scale: the scale factor. float
|
||||
:return: img. [C, H, W]
|
||||
"""
|
||||
if len(img.shape) == 2:
|
||||
img = img[np.newaxis, :, :]
|
||||
if img.shape[2] == 3:
|
||||
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.485, 0.456, 0.406) , (0.229, 0.224, 0.225) )])
|
||||
img = transform(img.astype(np.float32))
|
||||
else:
|
||||
img = img.astype(np.float32)
|
||||
img = torch.from_numpy(img)
|
||||
return img
|
||||
|
||||
def estimateleres(img, model, w, h):
|
||||
# leres transform input
|
||||
rgb_c = img[:, :, ::-1].copy()
|
||||
A_resize = cv2.resize(rgb_c, (w, h))
|
||||
img_torch = scale_torch(A_resize)[None, :, :, :]
|
||||
|
||||
# compute
|
||||
with torch.no_grad():
|
||||
img_torch = img_torch.to(devices.get_device_for("controlnet"))
|
||||
prediction = model.depth_model(img_torch)
|
||||
|
||||
prediction = prediction.squeeze().cpu().numpy()
|
||||
prediction = cv2.resize(prediction, (img.shape[1], img.shape[0]), interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
return prediction
|
||||
|
||||
def generatemask(size):
|
||||
# Generates a Guassian mask
|
||||
mask = np.zeros(size, dtype=np.float32)
|
||||
sigma = int(size[0]/16)
|
||||
k_size = int(2 * np.ceil(2 * int(size[0]/16)) + 1)
|
||||
mask[int(0.15*size[0]):size[0] - int(0.15*size[0]), int(0.15*size[1]): size[1] - int(0.15*size[1])] = 1
|
||||
mask = cv2.GaussianBlur(mask, (int(k_size), int(k_size)), sigma)
|
||||
mask = (mask - mask.min()) / (mask.max() - mask.min())
|
||||
mask = mask.astype(np.float32)
|
||||
return mask
|
||||
|
||||
def resizewithpool(img, size):
|
||||
i_size = img.shape[0]
|
||||
n = int(np.floor(i_size/size))
|
||||
|
||||
out = skimage.measure.block_reduce(img, (n, n), np.max)
|
||||
return out
|
||||
|
||||
def rgb2gray(rgb):
|
||||
# Converts rgb to gray
|
||||
return np.dot(rgb[..., :3], [0.2989, 0.5870, 0.1140])
|
||||
|
||||
def calculateprocessingres(img, basesize, confidence=0.1, scale_threshold=3, whole_size_threshold=3000):
|
||||
# Returns the R_x resolution described in section 5 of the main paper.
|
||||
|
||||
# Parameters:
|
||||
# img :input rgb image
|
||||
# basesize : size the dilation kernel which is equal to receptive field of the network.
|
||||
# confidence: value of x in R_x; allowed percentage of pixels that are not getting any contextual cue.
|
||||
# scale_threshold: maximum allowed upscaling on the input image ; it has been set to 3.
|
||||
# whole_size_threshold: maximum allowed resolution. (R_max from section 6 of the main paper)
|
||||
|
||||
# Returns:
|
||||
# outputsize_scale*speed_scale :The computed R_x resolution
|
||||
# patch_scale: K parameter from section 6 of the paper
|
||||
|
||||
# speed scale parameter is to process every image in a smaller size to accelerate the R_x resolution search
|
||||
speed_scale = 32
|
||||
image_dim = int(min(img.shape[0:2]))
|
||||
|
||||
gray = rgb2gray(img)
|
||||
grad = np.abs(cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3)) + np.abs(cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3))
|
||||
grad = cv2.resize(grad, (image_dim, image_dim), cv2.INTER_AREA)
|
||||
|
||||
# thresholding the gradient map to generate the edge-map as a proxy of the contextual cues
|
||||
m = grad.min()
|
||||
M = grad.max()
|
||||
middle = m + (0.4 * (M - m))
|
||||
grad[grad < middle] = 0
|
||||
grad[grad >= middle] = 1
|
||||
|
||||
# dilation kernel with size of the receptive field
|
||||
kernel = np.ones((int(basesize/speed_scale), int(basesize/speed_scale)), float)
|
||||
# dilation kernel with size of the a quarter of receptive field used to compute k
|
||||
# as described in section 6 of main paper
|
||||
kernel2 = np.ones((int(basesize / (4*speed_scale)), int(basesize / (4*speed_scale))), float)
|
||||
|
||||
# Output resolution limit set by the whole_size_threshold and scale_threshold.
|
||||
threshold = min(whole_size_threshold, scale_threshold * max(img.shape[:2]))
|
||||
|
||||
outputsize_scale = basesize / speed_scale
|
||||
for p_size in range(int(basesize/speed_scale), int(threshold/speed_scale), int(basesize / (2*speed_scale))):
|
||||
grad_resized = resizewithpool(grad, p_size)
|
||||
grad_resized = cv2.resize(grad_resized, (p_size, p_size), cv2.INTER_NEAREST)
|
||||
grad_resized[grad_resized >= 0.5] = 1
|
||||
grad_resized[grad_resized < 0.5] = 0
|
||||
|
||||
dilated = cv2.dilate(grad_resized, kernel, iterations=1)
|
||||
meanvalue = (1-dilated).mean()
|
||||
if meanvalue > confidence:
|
||||
break
|
||||
else:
|
||||
outputsize_scale = p_size
|
||||
|
||||
grad_region = cv2.dilate(grad_resized, kernel2, iterations=1)
|
||||
patch_scale = grad_region.mean()
|
||||
|
||||
return int(outputsize_scale*speed_scale), patch_scale
|
||||
|
||||
# Generate a double-input depth estimation
|
||||
def doubleestimate(img, size1, size2, pix2pixsize, model, net_type, pix2pixmodel):
|
||||
# Generate the low resolution estimation
|
||||
estimate1 = singleestimate(img, size1, model, net_type)
|
||||
# Resize to the inference size of merge network.
|
||||
estimate1 = cv2.resize(estimate1, (pix2pixsize, pix2pixsize), interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
# Generate the high resolution estimation
|
||||
estimate2 = singleestimate(img, size2, model, net_type)
|
||||
# Resize to the inference size of merge network.
|
||||
estimate2 = cv2.resize(estimate2, (pix2pixsize, pix2pixsize), interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
# Inference on the merge model
|
||||
pix2pixmodel.set_input(estimate1, estimate2)
|
||||
pix2pixmodel.test()
|
||||
visuals = pix2pixmodel.get_current_visuals()
|
||||
prediction_mapped = visuals['fake_B']
|
||||
prediction_mapped = (prediction_mapped+1)/2
|
||||
prediction_mapped = (prediction_mapped - torch.min(prediction_mapped)) / (
|
||||
torch.max(prediction_mapped) - torch.min(prediction_mapped))
|
||||
prediction_mapped = prediction_mapped.squeeze().cpu().numpy()
|
||||
|
||||
return prediction_mapped
|
||||
|
||||
# Generate a single-input depth estimation
|
||||
def singleestimate(img, msize, model, net_type):
|
||||
# if net_type == 0:
|
||||
return estimateleres(img, model, msize, msize)
|
||||
# else:
|
||||
# return estimatemidasBoost(img, model, msize, msize)
|
||||
|
||||
def applyGridpatch(blsize, stride, img, box):
|
||||
# Extract a simple grid patch.
|
||||
counter1 = 0
|
||||
patch_bound_list = {}
|
||||
for k in range(blsize, img.shape[1] - blsize, stride):
|
||||
for j in range(blsize, img.shape[0] - blsize, stride):
|
||||
patch_bound_list[str(counter1)] = {}
|
||||
patchbounds = [j - blsize, k - blsize, j - blsize + 2 * blsize, k - blsize + 2 * blsize]
|
||||
patch_bound = [box[0] + patchbounds[1], box[1] + patchbounds[0], patchbounds[3] - patchbounds[1],
|
||||
patchbounds[2] - patchbounds[0]]
|
||||
patch_bound_list[str(counter1)]['rect'] = patch_bound
|
||||
patch_bound_list[str(counter1)]['size'] = patch_bound[2]
|
||||
counter1 = counter1 + 1
|
||||
return patch_bound_list
|
||||
|
||||
# Generating local patches to perform the local refinement described in section 6 of the main paper.
|
||||
def generatepatchs(img, base_size):
|
||||
|
||||
# Compute the gradients as a proxy of the contextual cues.
|
||||
img_gray = rgb2gray(img)
|
||||
whole_grad = np.abs(cv2.Sobel(img_gray, cv2.CV_64F, 0, 1, ksize=3)) +\
|
||||
np.abs(cv2.Sobel(img_gray, cv2.CV_64F, 1, 0, ksize=3))
|
||||
|
||||
threshold = whole_grad[whole_grad > 0].mean()
|
||||
whole_grad[whole_grad < threshold] = 0
|
||||
|
||||
# We use the integral image to speed-up the evaluation of the amount of gradients for each patch.
|
||||
gf = whole_grad.sum()/len(whole_grad.reshape(-1))
|
||||
grad_integral_image = cv2.integral(whole_grad)
|
||||
|
||||
# Variables are selected such that the initial patch size would be the receptive field size
|
||||
# and the stride is set to 1/3 of the receptive field size.
|
||||
blsize = int(round(base_size/2))
|
||||
stride = int(round(blsize*0.75))
|
||||
|
||||
# Get initial Grid
|
||||
patch_bound_list = applyGridpatch(blsize, stride, img, [0, 0, 0, 0])
|
||||
|
||||
# Refine initial Grid of patches by discarding the flat (in terms of gradients of the rgb image) ones. Refine
|
||||
# each patch size to ensure that there will be enough depth cues for the network to generate a consistent depth map.
|
||||
print("Selecting patches ...")
|
||||
patch_bound_list = adaptiveselection(grad_integral_image, patch_bound_list, gf)
|
||||
|
||||
# Sort the patch list to make sure the merging operation will be done with the correct order: starting from biggest
|
||||
# patch
|
||||
patchset = sorted(patch_bound_list.items(), key=lambda x: getitem(x[1], 'size'), reverse=True)
|
||||
return patchset
|
||||
|
||||
def getGF_fromintegral(integralimage, rect):
|
||||
# Computes the gradient density of a given patch from the gradient integral image.
|
||||
x1 = rect[1]
|
||||
x2 = rect[1]+rect[3]
|
||||
y1 = rect[0]
|
||||
y2 = rect[0]+rect[2]
|
||||
value = integralimage[x2, y2]-integralimage[x1, y2]-integralimage[x2, y1]+integralimage[x1, y1]
|
||||
return value
|
||||
|
||||
# Adaptively select patches
|
||||
def adaptiveselection(integral_grad, patch_bound_list, gf):
|
||||
patchlist = {}
|
||||
count = 0
|
||||
height, width = integral_grad.shape
|
||||
|
||||
search_step = int(32/factor)
|
||||
|
||||
# Go through all patches
|
||||
for c in range(len(patch_bound_list)):
|
||||
# Get patch
|
||||
bbox = patch_bound_list[str(c)]['rect']
|
||||
|
||||
# Compute the amount of gradients present in the patch from the integral image.
|
||||
cgf = getGF_fromintegral(integral_grad, bbox)/(bbox[2]*bbox[3])
|
||||
|
||||
# Check if patching is beneficial by comparing the gradient density of the patch to
|
||||
# the gradient density of the whole image
|
||||
if cgf >= gf:
|
||||
bbox_test = bbox.copy()
|
||||
patchlist[str(count)] = {}
|
||||
|
||||
# Enlarge each patch until the gradient density of the patch is equal
|
||||
# to the whole image gradient density
|
||||
while True:
|
||||
|
||||
bbox_test[0] = bbox_test[0] - int(search_step/2)
|
||||
bbox_test[1] = bbox_test[1] - int(search_step/2)
|
||||
|
||||
bbox_test[2] = bbox_test[2] + search_step
|
||||
bbox_test[3] = bbox_test[3] + search_step
|
||||
|
||||
# Check if we are still within the image
|
||||
if bbox_test[0] < 0 or bbox_test[1] < 0 or bbox_test[1] + bbox_test[3] >= height \
|
||||
or bbox_test[0] + bbox_test[2] >= width:
|
||||
break
|
||||
|
||||
# Compare gradient density
|
||||
cgf = getGF_fromintegral(integral_grad, bbox_test)/(bbox_test[2]*bbox_test[3])
|
||||
if cgf < gf:
|
||||
break
|
||||
bbox = bbox_test.copy()
|
||||
|
||||
# Add patch to selected patches
|
||||
patchlist[str(count)]['rect'] = bbox
|
||||
patchlist[str(count)]['size'] = bbox[2]
|
||||
count = count + 1
|
||||
|
||||
# Return selected patches
|
||||
return patchlist
|
||||
|
||||
def impatch(image, rect):
|
||||
# Extract the given patch pixels from a given image.
|
||||
w1 = rect[0]
|
||||
h1 = rect[1]
|
||||
w2 = w1 + rect[2]
|
||||
h2 = h1 + rect[3]
|
||||
image_patch = image[h1:h2, w1:w2]
|
||||
return image_patch
|
||||
|
||||
class ImageandPatchs:
|
||||
def __init__(self, root_dir, name, patchsinfo, rgb_image, scale=1):
|
||||
self.root_dir = root_dir
|
||||
self.patchsinfo = patchsinfo
|
||||
self.name = name
|
||||
self.patchs = patchsinfo
|
||||
self.scale = scale
|
||||
|
||||
self.rgb_image = cv2.resize(rgb_image, (round(rgb_image.shape[1]*scale), round(rgb_image.shape[0]*scale)),
|
||||
interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
self.do_have_estimate = False
|
||||
self.estimation_updated_image = None
|
||||
self.estimation_base_image = None
|
||||
|
||||
def __len__(self):
|
||||
return len(self.patchs)
|
||||
|
||||
def set_base_estimate(self, est):
|
||||
self.estimation_base_image = est
|
||||
if self.estimation_updated_image is not None:
|
||||
self.do_have_estimate = True
|
||||
|
||||
def set_updated_estimate(self, est):
|
||||
self.estimation_updated_image = est
|
||||
if self.estimation_base_image is not None:
|
||||
self.do_have_estimate = True
|
||||
|
||||
def __getitem__(self, index):
|
||||
patch_id = int(self.patchs[index][0])
|
||||
rect = np.array(self.patchs[index][1]['rect'])
|
||||
msize = self.patchs[index][1]['size']
|
||||
|
||||
## applying scale to rect:
|
||||
rect = np.round(rect * self.scale)
|
||||
rect = rect.astype('int')
|
||||
msize = round(msize * self.scale)
|
||||
|
||||
patch_rgb = impatch(self.rgb_image, rect)
|
||||
if self.do_have_estimate:
|
||||
patch_whole_estimate_base = impatch(self.estimation_base_image, rect)
|
||||
patch_whole_estimate_updated = impatch(self.estimation_updated_image, rect)
|
||||
return {'patch_rgb': patch_rgb, 'patch_whole_estimate_base': patch_whole_estimate_base,
|
||||
'patch_whole_estimate_updated': patch_whole_estimate_updated, 'rect': rect,
|
||||
'size': msize, 'id': patch_id}
|
||||
else:
|
||||
return {'patch_rgb': patch_rgb, 'rect': rect, 'size': msize, 'id': patch_id}
|
||||
|
||||
def print_options(self, opt):
|
||||
"""Print and save options
|
||||
|
||||
It will print both current options and default values(if different).
|
||||
It will save options into a text file / [checkpoints_dir] / opt.txt
|
||||
"""
|
||||
message = ''
|
||||
message += '----------------- Options ---------------\n'
|
||||
for k, v in sorted(vars(opt).items()):
|
||||
comment = ''
|
||||
default = self.parser.get_default(k)
|
||||
if v != default:
|
||||
comment = '\t[default: %s]' % str(default)
|
||||
message += '{:>25}: {:<30}{}\n'.format(str(k), str(v), comment)
|
||||
message += '----------------- End -------------------'
|
||||
print(message)
|
||||
|
||||
# save to the disk
|
||||
"""
|
||||
expr_dir = os.path.join(opt.checkpoints_dir, opt.name)
|
||||
util.mkdirs(expr_dir)
|
||||
file_name = os.path.join(expr_dir, '{}_opt.txt'.format(opt.phase))
|
||||
with open(file_name, 'wt') as opt_file:
|
||||
opt_file.write(message)
|
||||
opt_file.write('\n')
|
||||
"""
|
||||
|
||||
def parse(self):
|
||||
"""Parse our options, create checkpoints directory suffix, and set up gpu device."""
|
||||
opt = self.gather_options()
|
||||
opt.isTrain = self.isTrain # train or test
|
||||
|
||||
# process opt.suffix
|
||||
if opt.suffix:
|
||||
suffix = ('_' + opt.suffix.format(**vars(opt))) if opt.suffix != '' else ''
|
||||
opt.name = opt.name + suffix
|
||||
|
||||
#self.print_options(opt)
|
||||
|
||||
# set gpu ids
|
||||
str_ids = opt.gpu_ids.split(',')
|
||||
opt.gpu_ids = []
|
||||
for str_id in str_ids:
|
||||
id = int(str_id)
|
||||
if id >= 0:
|
||||
opt.gpu_ids.append(id)
|
||||
#if len(opt.gpu_ids) > 0:
|
||||
# torch.cuda.set_device(opt.gpu_ids[0])
|
||||
|
||||
self.opt = opt
|
||||
return self.opt
|
||||
|
||||
|
||||
def estimateboost(img, model, model_type, pix2pixmodel, max_res=512):
|
||||
global whole_size_threshold
|
||||
|
||||
# get settings
|
||||
if hasattr(opts, 'depthmap_script_boost_rmax'):
|
||||
whole_size_threshold = opts.depthmap_script_boost_rmax
|
||||
|
||||
if model_type == 0: #leres
|
||||
net_receptive_field_size = 448
|
||||
patch_netsize = 2 * net_receptive_field_size
|
||||
elif model_type == 1: #dpt_beit_large_512
|
||||
net_receptive_field_size = 512
|
||||
patch_netsize = 2 * net_receptive_field_size
|
||||
else: #other midas
|
||||
net_receptive_field_size = 384
|
||||
patch_netsize = 2 * net_receptive_field_size
|
||||
|
||||
gc.collect()
|
||||
devices.torch_gc()
|
||||
|
||||
# Generate mask used to smoothly blend the local pathc estimations to the base estimate.
|
||||
# It is arbitrarily large to avoid artifacts during rescaling for each crop.
|
||||
mask_org = generatemask((3000, 3000))
|
||||
mask = mask_org.copy()
|
||||
|
||||
# Value x of R_x defined in the section 5 of the main paper.
|
||||
r_threshold_value = 0.2
|
||||
#if R0:
|
||||
# r_threshold_value = 0
|
||||
|
||||
input_resolution = img.shape
|
||||
scale_threshold = 3 # Allows up-scaling with a scale up to 3
|
||||
|
||||
# Find the best input resolution R-x. The resolution search described in section 5-double estimation of the main paper and section B of the
|
||||
# supplementary material.
|
||||
whole_image_optimal_size, patch_scale = calculateprocessingres(img, net_receptive_field_size, r_threshold_value, scale_threshold, whole_size_threshold)
|
||||
|
||||
# print('wholeImage being processed in :', whole_image_optimal_size)
|
||||
|
||||
# Generate the base estimate using the double estimation.
|
||||
whole_estimate = doubleestimate(img, net_receptive_field_size, whole_image_optimal_size, pix2pixsize, model, model_type, pix2pixmodel)
|
||||
|
||||
# Compute the multiplier described in section 6 of the main paper to make sure our initial patch can select
|
||||
# small high-density regions of the image.
|
||||
global factor
|
||||
factor = max(min(1, 4 * patch_scale * whole_image_optimal_size / whole_size_threshold), 0.2)
|
||||
# print('Adjust factor is:', 1/factor)
|
||||
|
||||
# Check if Local boosting is beneficial.
|
||||
if max_res < whole_image_optimal_size:
|
||||
# print("No Local boosting. Specified Max Res is smaller than R20, Returning doubleestimate result")
|
||||
return cv2.resize(whole_estimate, (input_resolution[1], input_resolution[0]), interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
# Compute the default target resolution.
|
||||
if img.shape[0] > img.shape[1]:
|
||||
a = 2 * whole_image_optimal_size
|
||||
b = round(2 * whole_image_optimal_size * img.shape[1] / img.shape[0])
|
||||
else:
|
||||
a = round(2 * whole_image_optimal_size * img.shape[0] / img.shape[1])
|
||||
b = 2 * whole_image_optimal_size
|
||||
b = int(round(b / factor))
|
||||
a = int(round(a / factor))
|
||||
|
||||
"""
|
||||
# recompute a, b and saturate to max res.
|
||||
if max(a,b) > max_res:
|
||||
print('Default Res is higher than max-res: Reducing final resolution')
|
||||
if img.shape[0] > img.shape[1]:
|
||||
a = max_res
|
||||
b = round(max_res * img.shape[1] / img.shape[0])
|
||||
else:
|
||||
a = round(max_res * img.shape[0] / img.shape[1])
|
||||
b = max_res
|
||||
b = int(b)
|
||||
a = int(a)
|
||||
"""
|
||||
|
||||
img = cv2.resize(img, (b, a), interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
# Extract selected patches for local refinement
|
||||
base_size = net_receptive_field_size * 2
|
||||
patchset = generatepatchs(img, base_size)
|
||||
|
||||
# print('Target resolution: ', img.shape)
|
||||
|
||||
# Computing a scale in case user prompted to generate the results as the same resolution of the input.
|
||||
# Notice that our method output resolution is independent of the input resolution and this parameter will only
|
||||
# enable a scaling operation during the local patch merge implementation to generate results with the same resolution
|
||||
# as the input.
|
||||
"""
|
||||
if output_resolution == 1:
|
||||
mergein_scale = input_resolution[0] / img.shape[0]
|
||||
print('Dynamicly change merged-in resolution; scale:', mergein_scale)
|
||||
else:
|
||||
mergein_scale = 1
|
||||
"""
|
||||
# always rescale to input res for now
|
||||
mergein_scale = input_resolution[0] / img.shape[0]
|
||||
|
||||
imageandpatchs = ImageandPatchs('', '', patchset, img, mergein_scale)
|
||||
whole_estimate_resized = cv2.resize(whole_estimate, (round(img.shape[1]*mergein_scale),
|
||||
round(img.shape[0]*mergein_scale)), interpolation=cv2.INTER_CUBIC)
|
||||
imageandpatchs.set_base_estimate(whole_estimate_resized.copy())
|
||||
imageandpatchs.set_updated_estimate(whole_estimate_resized.copy())
|
||||
|
||||
print('Resulting depthmap resolution will be :', whole_estimate_resized.shape[:2])
|
||||
print('Patches to process: '+str(len(imageandpatchs)))
|
||||
|
||||
# Enumerate through all patches, generate their estimations and refining the base estimate.
|
||||
for patch_ind in range(len(imageandpatchs)):
|
||||
|
||||
# Get patch information
|
||||
patch = imageandpatchs[patch_ind] # patch object
|
||||
patch_rgb = patch['patch_rgb'] # rgb patch
|
||||
patch_whole_estimate_base = patch['patch_whole_estimate_base'] # corresponding patch from base
|
||||
rect = patch['rect'] # patch size and location
|
||||
patch_id = patch['id'] # patch ID
|
||||
org_size = patch_whole_estimate_base.shape # the original size from the unscaled input
|
||||
print('\t Processing patch', patch_ind, '/', len(imageandpatchs)-1, '|', rect)
|
||||
|
||||
# We apply double estimation for patches. The high resolution value is fixed to twice the receptive
|
||||
# field size of the network for patches to accelerate the process.
|
||||
patch_estimation = doubleestimate(patch_rgb, net_receptive_field_size, patch_netsize, pix2pixsize, model, model_type, pix2pixmodel)
|
||||
patch_estimation = cv2.resize(patch_estimation, (pix2pixsize, pix2pixsize), interpolation=cv2.INTER_CUBIC)
|
||||
patch_whole_estimate_base = cv2.resize(patch_whole_estimate_base, (pix2pixsize, pix2pixsize), interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
# Merging the patch estimation into the base estimate using our merge network:
|
||||
# We feed the patch estimation and the same region from the updated base estimate to the merge network
|
||||
# to generate the target estimate for the corresponding region.
|
||||
pix2pixmodel.set_input(patch_whole_estimate_base, patch_estimation)
|
||||
|
||||
# Run merging network
|
||||
pix2pixmodel.test()
|
||||
visuals = pix2pixmodel.get_current_visuals()
|
||||
|
||||
prediction_mapped = visuals['fake_B']
|
||||
prediction_mapped = (prediction_mapped+1)/2
|
||||
prediction_mapped = prediction_mapped.squeeze().cpu().numpy()
|
||||
|
||||
mapped = prediction_mapped
|
||||
|
||||
# We use a simple linear polynomial to make sure the result of the merge network would match the values of
|
||||
# base estimate
|
||||
p_coef = np.polyfit(mapped.reshape(-1), patch_whole_estimate_base.reshape(-1), deg=1)
|
||||
merged = np.polyval(p_coef, mapped.reshape(-1)).reshape(mapped.shape)
|
||||
|
||||
merged = cv2.resize(merged, (org_size[1],org_size[0]), interpolation=cv2.INTER_CUBIC)
|
||||
|
||||
# Get patch size and location
|
||||
w1 = rect[0]
|
||||
h1 = rect[1]
|
||||
w2 = w1 + rect[2]
|
||||
h2 = h1 + rect[3]
|
||||
|
||||
# To speed up the implementation, we only generate the Gaussian mask once with a sufficiently large size
|
||||
# and resize it to our needed size while merging the patches.
|
||||
if mask.shape != org_size:
|
||||
mask = cv2.resize(mask_org, (org_size[1],org_size[0]), interpolation=cv2.INTER_LINEAR)
|
||||
|
||||
tobemergedto = imageandpatchs.estimation_updated_image
|
||||
|
||||
# Update the whole estimation:
|
||||
# We use a simple Gaussian mask to blend the merged patch region with the base estimate to ensure seamless
|
||||
# blending at the boundaries of the patch region.
|
||||
tobemergedto[h1:h2, w1:w2] = np.multiply(tobemergedto[h1:h2, w1:w2], 1 - mask) + np.multiply(merged, mask)
|
||||
imageandpatchs.set_updated_estimate(tobemergedto)
|
||||
|
||||
# output
|
||||
return cv2.resize(imageandpatchs.estimation_updated_image, (input_resolution[1], input_resolution[0]), interpolation=cv2.INTER_CUBIC)
|
||||
@@ -0,0 +1,34 @@
|
||||
from . import network_auxi as network
|
||||
from .net_tools import get_func
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
from modules import devices
|
||||
|
||||
class RelDepthModel(nn.Module):
|
||||
def __init__(self, backbone='resnet50'):
|
||||
super(RelDepthModel, self).__init__()
|
||||
if backbone == 'resnet50':
|
||||
encoder = 'resnet50_stride32'
|
||||
elif backbone == 'resnext101':
|
||||
encoder = 'resnext101_stride32x8d'
|
||||
self.depth_model = DepthModel(encoder)
|
||||
|
||||
def inference(self, rgb):
|
||||
with torch.no_grad():
|
||||
input = rgb.to(self.depth_model.device)
|
||||
depth = self.depth_model(input)
|
||||
#pred_depth_out = depth - depth.min() + 0.01
|
||||
return depth #pred_depth_out
|
||||
|
||||
|
||||
class DepthModel(nn.Module):
|
||||
def __init__(self, encoder):
|
||||
super(DepthModel, self).__init__()
|
||||
backbone = network.__name__.split('.')[-1] + '.' + encoder
|
||||
self.encoder_modules = get_func(backbone)()
|
||||
self.decoder_modules = network.Decoder()
|
||||
|
||||
def forward(self, x):
|
||||
lateral_out = self.encoder_modules(x)
|
||||
out_logit = self.decoder_modules(lateral_out)
|
||||
return out_logit
|
||||
@@ -0,0 +1,54 @@
|
||||
import importlib
|
||||
import torch
|
||||
import os
|
||||
from collections import OrderedDict
|
||||
|
||||
|
||||
def get_func(func_name):
|
||||
"""Helper to return a function object by name. func_name must identify a
|
||||
function in this module or the path to a function relative to the base
|
||||
'modeling' module.
|
||||
"""
|
||||
if func_name == '':
|
||||
return None
|
||||
try:
|
||||
parts = func_name.split('.')
|
||||
# Refers to a function in this module
|
||||
if len(parts) == 1:
|
||||
return globals()[parts[0]]
|
||||
# Otherwise, assume we're referencing a module under modeling
|
||||
module_name = 'annotator.leres.leres.' + '.'.join(parts[:-1])
|
||||
module = importlib.import_module(module_name)
|
||||
return getattr(module, parts[-1])
|
||||
except Exception:
|
||||
print('Failed to f1ind function: %s', func_name)
|
||||
raise
|
||||
|
||||
def load_ckpt(args, depth_model, shift_model, focal_model):
|
||||
"""
|
||||
Load checkpoint.
|
||||
"""
|
||||
if os.path.isfile(args.load_ckpt):
|
||||
print("loading checkpoint %s" % args.load_ckpt)
|
||||
checkpoint = torch.load(args.load_ckpt)
|
||||
if shift_model is not None:
|
||||
shift_model.load_state_dict(strip_prefix_if_present(checkpoint['shift_model'], 'module.'),
|
||||
strict=True)
|
||||
if focal_model is not None:
|
||||
focal_model.load_state_dict(strip_prefix_if_present(checkpoint['focal_model'], 'module.'),
|
||||
strict=True)
|
||||
depth_model.load_state_dict(strip_prefix_if_present(checkpoint['depth_model'], "module."),
|
||||
strict=True)
|
||||
del checkpoint
|
||||
if torch.cuda.is_available():
|
||||
torch.cuda.empty_cache()
|
||||
|
||||
|
||||
def strip_prefix_if_present(state_dict, prefix):
|
||||
keys = sorted(state_dict.keys())
|
||||
if not all(key.startswith(prefix) for key in keys):
|
||||
return state_dict
|
||||
stripped_state_dict = OrderedDict()
|
||||
for key, value in state_dict.items():
|
||||
stripped_state_dict[key.replace(prefix, "")] = value
|
||||
return stripped_state_dict
|
||||
@@ -0,0 +1,417 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.init as init
|
||||
|
||||
from . import Resnet, Resnext_torch
|
||||
|
||||
|
||||
def resnet50_stride32():
|
||||
return DepthNet(backbone='resnet', depth=50, upfactors=[2, 2, 2, 2])
|
||||
|
||||
def resnext101_stride32x8d():
|
||||
return DepthNet(backbone='resnext101_32x8d', depth=101, upfactors=[2, 2, 2, 2])
|
||||
|
||||
|
||||
class Decoder(nn.Module):
|
||||
def __init__(self):
|
||||
super(Decoder, self).__init__()
|
||||
self.inchannels = [256, 512, 1024, 2048]
|
||||
self.midchannels = [256, 256, 256, 512]
|
||||
self.upfactors = [2,2,2,2]
|
||||
self.outchannels = 1
|
||||
|
||||
self.conv = FTB(inchannels=self.inchannels[3], midchannels=self.midchannels[3])
|
||||
self.conv1 = nn.Conv2d(in_channels=self.midchannels[3], out_channels=self.midchannels[2], kernel_size=3, padding=1, stride=1, bias=True)
|
||||
self.upsample = nn.Upsample(scale_factor=self.upfactors[3], mode='bilinear', align_corners=True)
|
||||
|
||||
self.ffm2 = FFM(inchannels=self.inchannels[2], midchannels=self.midchannels[2], outchannels = self.midchannels[2], upfactor=self.upfactors[2])
|
||||
self.ffm1 = FFM(inchannels=self.inchannels[1], midchannels=self.midchannels[1], outchannels = self.midchannels[1], upfactor=self.upfactors[1])
|
||||
self.ffm0 = FFM(inchannels=self.inchannels[0], midchannels=self.midchannels[0], outchannels = self.midchannels[0], upfactor=self.upfactors[0])
|
||||
|
||||
self.outconv = AO(inchannels=self.midchannels[0], outchannels=self.outchannels, upfactor=2)
|
||||
self._init_params()
|
||||
|
||||
def _init_params(self):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.BatchNorm2d): #NN.BatchNorm2d
|
||||
init.constant_(m.weight, 1)
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
|
||||
def forward(self, features):
|
||||
x_32x = self.conv(features[3]) # 1/32
|
||||
x_32 = self.conv1(x_32x)
|
||||
x_16 = self.upsample(x_32) # 1/16
|
||||
|
||||
x_8 = self.ffm2(features[2], x_16) # 1/8
|
||||
x_4 = self.ffm1(features[1], x_8) # 1/4
|
||||
x_2 = self.ffm0(features[0], x_4) # 1/2
|
||||
#-----------------------------------------
|
||||
x = self.outconv(x_2) # original size
|
||||
return x
|
||||
|
||||
class DepthNet(nn.Module):
|
||||
__factory = {
|
||||
18: Resnet.resnet18,
|
||||
34: Resnet.resnet34,
|
||||
50: Resnet.resnet50,
|
||||
101: Resnet.resnet101,
|
||||
152: Resnet.resnet152
|
||||
}
|
||||
def __init__(self,
|
||||
backbone='resnet',
|
||||
depth=50,
|
||||
upfactors=[2, 2, 2, 2]):
|
||||
super(DepthNet, self).__init__()
|
||||
self.backbone = backbone
|
||||
self.depth = depth
|
||||
self.pretrained = False
|
||||
self.inchannels = [256, 512, 1024, 2048]
|
||||
self.midchannels = [256, 256, 256, 512]
|
||||
self.upfactors = upfactors
|
||||
self.outchannels = 1
|
||||
|
||||
# Build model
|
||||
if self.backbone == 'resnet':
|
||||
if self.depth not in DepthNet.__factory:
|
||||
raise KeyError("Unsupported depth:", self.depth)
|
||||
self.encoder = DepthNet.__factory[depth](pretrained=self.pretrained)
|
||||
elif self.backbone == 'resnext101_32x8d':
|
||||
self.encoder = Resnext_torch.resnext101_32x8d(pretrained=self.pretrained)
|
||||
else:
|
||||
self.encoder = Resnext_torch.resnext101(pretrained=self.pretrained)
|
||||
|
||||
def forward(self, x):
|
||||
x = self.encoder(x) # 1/32, 1/16, 1/8, 1/4
|
||||
return x
|
||||
|
||||
|
||||
class FTB(nn.Module):
|
||||
def __init__(self, inchannels, midchannels=512):
|
||||
super(FTB, self).__init__()
|
||||
self.in1 = inchannels
|
||||
self.mid = midchannels
|
||||
self.conv1 = nn.Conv2d(in_channels=self.in1, out_channels=self.mid, kernel_size=3, padding=1, stride=1,
|
||||
bias=True)
|
||||
# NN.BatchNorm2d
|
||||
self.conv_branch = nn.Sequential(nn.ReLU(inplace=True), \
|
||||
nn.Conv2d(in_channels=self.mid, out_channels=self.mid, kernel_size=3,
|
||||
padding=1, stride=1, bias=True), \
|
||||
nn.BatchNorm2d(num_features=self.mid), \
|
||||
nn.ReLU(inplace=True), \
|
||||
nn.Conv2d(in_channels=self.mid, out_channels=self.mid, kernel_size=3,
|
||||
padding=1, stride=1, bias=True))
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
|
||||
self.init_params()
|
||||
|
||||
def forward(self, x):
|
||||
x = self.conv1(x)
|
||||
x = x + self.conv_branch(x)
|
||||
x = self.relu(x)
|
||||
|
||||
return x
|
||||
|
||||
def init_params(self):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.BatchNorm2d): # NN.BatchNorm2d
|
||||
init.constant_(m.weight, 1)
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
|
||||
|
||||
class ATA(nn.Module):
|
||||
def __init__(self, inchannels, reduction=8):
|
||||
super(ATA, self).__init__()
|
||||
self.inchannels = inchannels
|
||||
self.avg_pool = nn.AdaptiveAvgPool2d(1)
|
||||
self.fc = nn.Sequential(nn.Linear(self.inchannels * 2, self.inchannels // reduction),
|
||||
nn.ReLU(inplace=True),
|
||||
nn.Linear(self.inchannels // reduction, self.inchannels),
|
||||
nn.Sigmoid())
|
||||
self.init_params()
|
||||
|
||||
def forward(self, low_x, high_x):
|
||||
n, c, _, _ = low_x.size()
|
||||
x = torch.cat([low_x, high_x], 1)
|
||||
x = self.avg_pool(x)
|
||||
x = x.view(n, -1)
|
||||
x = self.fc(x).view(n, c, 1, 1)
|
||||
x = low_x * x + high_x
|
||||
|
||||
return x
|
||||
|
||||
def init_params(self):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
# init.normal(m.weight, std=0.01)
|
||||
init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
# init.normal_(m.weight, std=0.01)
|
||||
init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.BatchNorm2d): # NN.BatchNorm2d
|
||||
init.constant_(m.weight, 1)
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
|
||||
|
||||
class FFM(nn.Module):
|
||||
def __init__(self, inchannels, midchannels, outchannels, upfactor=2):
|
||||
super(FFM, self).__init__()
|
||||
self.inchannels = inchannels
|
||||
self.midchannels = midchannels
|
||||
self.outchannels = outchannels
|
||||
self.upfactor = upfactor
|
||||
|
||||
self.ftb1 = FTB(inchannels=self.inchannels, midchannels=self.midchannels)
|
||||
# self.ata = ATA(inchannels = self.midchannels)
|
||||
self.ftb2 = FTB(inchannels=self.midchannels, midchannels=self.outchannels)
|
||||
|
||||
self.upsample = nn.Upsample(scale_factor=self.upfactor, mode='bilinear', align_corners=True)
|
||||
|
||||
self.init_params()
|
||||
|
||||
def forward(self, low_x, high_x):
|
||||
x = self.ftb1(low_x)
|
||||
x = x + high_x
|
||||
x = self.ftb2(x)
|
||||
x = self.upsample(x)
|
||||
|
||||
return x
|
||||
|
||||
def init_params(self):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.BatchNorm2d): # NN.Batchnorm2d
|
||||
init.constant_(m.weight, 1)
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
|
||||
|
||||
class AO(nn.Module):
|
||||
# Adaptive output module
|
||||
def __init__(self, inchannels, outchannels, upfactor=2):
|
||||
super(AO, self).__init__()
|
||||
self.inchannels = inchannels
|
||||
self.outchannels = outchannels
|
||||
self.upfactor = upfactor
|
||||
|
||||
self.adapt_conv = nn.Sequential(
|
||||
nn.Conv2d(in_channels=self.inchannels, out_channels=self.inchannels // 2, kernel_size=3, padding=1,
|
||||
stride=1, bias=True), \
|
||||
nn.BatchNorm2d(num_features=self.inchannels // 2), \
|
||||
nn.ReLU(inplace=True), \
|
||||
nn.Conv2d(in_channels=self.inchannels // 2, out_channels=self.outchannels, kernel_size=3, padding=1,
|
||||
stride=1, bias=True), \
|
||||
nn.Upsample(scale_factor=self.upfactor, mode='bilinear', align_corners=True))
|
||||
|
||||
self.init_params()
|
||||
|
||||
def forward(self, x):
|
||||
x = self.adapt_conv(x)
|
||||
return x
|
||||
|
||||
def init_params(self):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.BatchNorm2d): # NN.Batchnorm2d
|
||||
init.constant_(m.weight, 1)
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
|
||||
|
||||
|
||||
# ==============================================================================================================
|
||||
|
||||
|
||||
class ResidualConv(nn.Module):
|
||||
def __init__(self, inchannels):
|
||||
super(ResidualConv, self).__init__()
|
||||
# NN.BatchNorm2d
|
||||
self.conv = nn.Sequential(
|
||||
# nn.BatchNorm2d(num_features=inchannels),
|
||||
nn.ReLU(inplace=False),
|
||||
# nn.Conv2d(in_channels=inchannels, out_channels=inchannels, kernel_size=3, padding=1, stride=1, groups=inchannels,bias=True),
|
||||
# nn.Conv2d(in_channels=inchannels, out_channels=inchannels, kernel_size=1, padding=0, stride=1, groups=1,bias=True)
|
||||
nn.Conv2d(in_channels=inchannels, out_channels=inchannels / 2, kernel_size=3, padding=1, stride=1,
|
||||
bias=False),
|
||||
nn.BatchNorm2d(num_features=inchannels / 2),
|
||||
nn.ReLU(inplace=False),
|
||||
nn.Conv2d(in_channels=inchannels / 2, out_channels=inchannels, kernel_size=3, padding=1, stride=1,
|
||||
bias=False)
|
||||
)
|
||||
self.init_params()
|
||||
|
||||
def forward(self, x):
|
||||
x = self.conv(x) + x
|
||||
return x
|
||||
|
||||
def init_params(self):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.BatchNorm2d): # NN.BatchNorm2d
|
||||
init.constant_(m.weight, 1)
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
|
||||
|
||||
class FeatureFusion(nn.Module):
|
||||
def __init__(self, inchannels, outchannels):
|
||||
super(FeatureFusion, self).__init__()
|
||||
self.conv = ResidualConv(inchannels=inchannels)
|
||||
# NN.BatchNorm2d
|
||||
self.up = nn.Sequential(ResidualConv(inchannels=inchannels),
|
||||
nn.ConvTranspose2d(in_channels=inchannels, out_channels=outchannels, kernel_size=3,
|
||||
stride=2, padding=1, output_padding=1),
|
||||
nn.BatchNorm2d(num_features=outchannels),
|
||||
nn.ReLU(inplace=True))
|
||||
|
||||
def forward(self, lowfeat, highfeat):
|
||||
return self.up(highfeat + self.conv(lowfeat))
|
||||
|
||||
def init_params(self):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
# init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
init.normal_(m.weight, std=0.01)
|
||||
# init.xavier_normal_(m.weight)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.BatchNorm2d): # NN.BatchNorm2d
|
||||
init.constant_(m.weight, 1)
|
||||
init.constant_(m.bias, 0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
init.normal_(m.weight, std=0.01)
|
||||
if m.bias is not None:
|
||||
init.constant_(m.bias, 0)
|
||||
|
||||
|
||||
class SenceUnderstand(nn.Module):
|
||||
def __init__(self, channels):
|
||||
super(SenceUnderstand, self).__init__()
|
||||
self.channels = channels
|
||||
self.conv1 = nn.Sequential(nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, padding=1),
|
||||
nn.ReLU(inplace=True))
|
||||
self.pool = nn.AdaptiveAvgPool2d(8)
|
||||
self.fc = nn.Sequential(nn.Linear(512 * 8 * 8, self.channels),
|
||||
nn.ReLU(inplace=True))
|
||||
self.conv2 = nn.Sequential(
|
||||
nn.Conv2d(in_channels=self.channels, out_channels=self.channels, kernel_size=1, padding=0),
|
||||
nn.ReLU(inplace=True))
|
||||
self.initial_params()
|
||||
|
||||
def forward(self, x):
|
||||
n, c, h, w = x.size()
|
||||
x = self.conv1(x)
|
||||
x = self.pool(x)
|
||||
x = x.view(n, -1)
|
||||
x = self.fc(x)
|
||||
x = x.view(n, self.channels, 1, 1)
|
||||
x = self.conv2(x)
|
||||
x = x.repeat(1, 1, h, w)
|
||||
return x
|
||||
|
||||
def initial_params(self, dev=0.01):
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
# print torch.sum(m.weight)
|
||||
m.weight.data.normal_(0, dev)
|
||||
if m.bias is not None:
|
||||
m.bias.data.fill_(0)
|
||||
elif isinstance(m, nn.ConvTranspose2d):
|
||||
# print torch.sum(m.weight)
|
||||
m.weight.data.normal_(0, dev)
|
||||
if m.bias is not None:
|
||||
m.bias.data.fill_(0)
|
||||
elif isinstance(m, nn.Linear):
|
||||
m.weight.data.normal_(0, dev)
|
||||
|
||||
|
||||
if __name__ == '__main__':
|
||||
net = DepthNet(depth=50, pretrained=True)
|
||||
print(net)
|
||||
inputs = torch.ones(4,3,128,128)
|
||||
out = net(inputs)
|
||||
print(out.size())
|
||||
|
||||
@@ -0,0 +1,19 @@
|
||||
https://github.com/compphoto/BoostingMonocularDepth
|
||||
|
||||
Copyright 2021, Seyed Mahdi Hosseini Miangoleh, Sebastian Dille, Computational Photography Laboratory. All rights reserved.
|
||||
|
||||
This software is for academic use only. A redistribution of this
|
||||
software, with or without modifications, has to be for academic
|
||||
use only, while giving the appropriate credit to the original
|
||||
authors of the software. The methods implemented as a part of
|
||||
this software may be covered under patents or patent applications.
|
||||
|
||||
THIS SOFTWARE IS PROVIDED BY THE AUTHOR ''AS IS'' AND ANY EXPRESS OR IMPLIED
|
||||
WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND
|
||||
FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE AUTHOR OR
|
||||
CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
|
||||
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
|
||||
SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON
|
||||
ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING
|
||||
NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF
|
||||
ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
|
||||
@@ -0,0 +1,67 @@
|
||||
"""This package contains modules related to objective functions, optimizations, and network architectures.
|
||||
|
||||
To add a custom model class called 'dummy', you need to add a file called 'dummy_model.py' and define a subclass DummyModel inherited from BaseModel.
|
||||
You need to implement the following five functions:
|
||||
-- <__init__>: initialize the class; first call BaseModel.__init__(self, opt).
|
||||
-- <set_input>: unpack data from dataset and apply preprocessing.
|
||||
-- <forward>: produce intermediate results.
|
||||
-- <optimize_parameters>: calculate loss, gradients, and update network weights.
|
||||
-- <modify_commandline_options>: (optionally) add model-specific options and set default options.
|
||||
|
||||
In the function <__init__>, you need to define four lists:
|
||||
-- self.loss_names (str list): specify the training losses that you want to plot and save.
|
||||
-- self.model_names (str list): define networks used in our training.
|
||||
-- self.visual_names (str list): specify the images that you want to display and save.
|
||||
-- self.optimizers (optimizer list): define and initialize optimizers. You can define one optimizer for each network. If two networks are updated at the same time, you can use itertools.chain to group them. See cycle_gan_model.py for an usage.
|
||||
|
||||
Now you can use the model class by specifying flag '--model dummy'.
|
||||
See our template model class 'template_model.py' for more details.
|
||||
"""
|
||||
|
||||
import importlib
|
||||
from .base_model import BaseModel
|
||||
|
||||
|
||||
def find_model_using_name(model_name):
|
||||
"""Import the module "models/[model_name]_model.py".
|
||||
|
||||
In the file, the class called DatasetNameModel() will
|
||||
be instantiated. It has to be a subclass of BaseModel,
|
||||
and it is case-insensitive.
|
||||
"""
|
||||
model_filename = "annotator.leres.pix2pix.models." + model_name + "_model"
|
||||
modellib = importlib.import_module(model_filename)
|
||||
model = None
|
||||
target_model_name = model_name.replace('_', '') + 'model'
|
||||
for name, cls in modellib.__dict__.items():
|
||||
if name.lower() == target_model_name.lower() \
|
||||
and issubclass(cls, BaseModel):
|
||||
model = cls
|
||||
|
||||
if model is None:
|
||||
print("In %s.py, there should be a subclass of BaseModel with class name that matches %s in lowercase." % (model_filename, target_model_name))
|
||||
exit(0)
|
||||
|
||||
return model
|
||||
|
||||
|
||||
def get_option_setter(model_name):
|
||||
"""Return the static method <modify_commandline_options> of the model class."""
|
||||
model_class = find_model_using_name(model_name)
|
||||
return model_class.modify_commandline_options
|
||||
|
||||
|
||||
def create_model(opt):
|
||||
"""Create a model given the option.
|
||||
|
||||
This function warps the class CustomDatasetDataLoader.
|
||||
This is the main interface between this package and 'train.py'/'test.py'
|
||||
|
||||
Example:
|
||||
>>> from models import create_model
|
||||
>>> model = create_model(opt)
|
||||
"""
|
||||
model = find_model_using_name(opt.model)
|
||||
instance = model(opt)
|
||||
print("model [%s] was created" % type(instance).__name__)
|
||||
return instance
|
||||
@@ -0,0 +1,241 @@
|
||||
import os
|
||||
import torch, gc
|
||||
from modules import devices
|
||||
from collections import OrderedDict
|
||||
from abc import ABC, abstractmethod
|
||||
from . import networks
|
||||
|
||||
|
||||
class BaseModel(ABC):
|
||||
"""This class is an abstract base class (ABC) for models.
|
||||
To create a subclass, you need to implement the following five functions:
|
||||
-- <__init__>: initialize the class; first call BaseModel.__init__(self, opt).
|
||||
-- <set_input>: unpack data from dataset and apply preprocessing.
|
||||
-- <forward>: produce intermediate results.
|
||||
-- <optimize_parameters>: calculate losses, gradients, and update network weights.
|
||||
-- <modify_commandline_options>: (optionally) add model-specific options and set default options.
|
||||
"""
|
||||
|
||||
def __init__(self, opt):
|
||||
"""Initialize the BaseModel class.
|
||||
|
||||
Parameters:
|
||||
opt (Option class)-- stores all the experiment flags; needs to be a subclass of BaseOptions
|
||||
|
||||
When creating your custom class, you need to implement your own initialization.
|
||||
In this function, you should first call <BaseModel.__init__(self, opt)>
|
||||
Then, you need to define four lists:
|
||||
-- self.loss_names (str list): specify the training losses that you want to plot and save.
|
||||
-- self.model_names (str list): define networks used in our training.
|
||||
-- self.visual_names (str list): specify the images that you want to display and save.
|
||||
-- self.optimizers (optimizer list): define and initialize optimizers. You can define one optimizer for each network. If two networks are updated at the same time, you can use itertools.chain to group them. See cycle_gan_model.py for an example.
|
||||
"""
|
||||
self.opt = opt
|
||||
self.gpu_ids = opt.gpu_ids
|
||||
self.isTrain = opt.isTrain
|
||||
self.device = torch.device('cuda:{}'.format(self.gpu_ids[0])) if self.gpu_ids else torch.device('cpu') # get device name: CPU or GPU
|
||||
self.save_dir = os.path.join(opt.checkpoints_dir, opt.name) # save all the checkpoints to save_dir
|
||||
if opt.preprocess != 'scale_width': # with [scale_width], input images might have different sizes, which hurts the performance of cudnn.benchmark.
|
||||
torch.backends.cudnn.benchmark = True
|
||||
self.loss_names = []
|
||||
self.model_names = []
|
||||
self.visual_names = []
|
||||
self.optimizers = []
|
||||
self.image_paths = []
|
||||
self.metric = 0 # used for learning rate policy 'plateau'
|
||||
|
||||
@staticmethod
|
||||
def modify_commandline_options(parser, is_train):
|
||||
"""Add new model-specific options, and rewrite default values for existing options.
|
||||
|
||||
Parameters:
|
||||
parser -- original option parser
|
||||
is_train (bool) -- whether training phase or test phase. You can use this flag to add training-specific or test-specific options.
|
||||
|
||||
Returns:
|
||||
the modified parser.
|
||||
"""
|
||||
return parser
|
||||
|
||||
@abstractmethod
|
||||
def set_input(self, input):
|
||||
"""Unpack input data from the dataloader and perform necessary pre-processing steps.
|
||||
|
||||
Parameters:
|
||||
input (dict): includes the data itself and its metadata information.
|
||||
"""
|
||||
pass
|
||||
|
||||
@abstractmethod
|
||||
def forward(self):
|
||||
"""Run forward pass; called by both functions <optimize_parameters> and <test>."""
|
||||
pass
|
||||
|
||||
@abstractmethod
|
||||
def optimize_parameters(self):
|
||||
"""Calculate losses, gradients, and update network weights; called in every training iteration"""
|
||||
pass
|
||||
|
||||
def setup(self, opt):
|
||||
"""Load and print networks; create schedulers
|
||||
|
||||
Parameters:
|
||||
opt (Option class) -- stores all the experiment flags; needs to be a subclass of BaseOptions
|
||||
"""
|
||||
if self.isTrain:
|
||||
self.schedulers = [networks.get_scheduler(optimizer, opt) for optimizer in self.optimizers]
|
||||
if not self.isTrain or opt.continue_train:
|
||||
load_suffix = 'iter_%d' % opt.load_iter if opt.load_iter > 0 else opt.epoch
|
||||
self.load_networks(load_suffix)
|
||||
self.print_networks(opt.verbose)
|
||||
|
||||
def eval(self):
|
||||
"""Make models eval mode during test time"""
|
||||
for name in self.model_names:
|
||||
if isinstance(name, str):
|
||||
net = getattr(self, 'net' + name)
|
||||
net.eval()
|
||||
|
||||
def test(self):
|
||||
"""Forward function used in test time.
|
||||
|
||||
This function wraps <forward> function in no_grad() so we don't save intermediate steps for backprop
|
||||
It also calls <compute_visuals> to produce additional visualization results
|
||||
"""
|
||||
with torch.no_grad():
|
||||
self.forward()
|
||||
self.compute_visuals()
|
||||
|
||||
def compute_visuals(self):
|
||||
"""Calculate additional output images for visdom and HTML visualization"""
|
||||
pass
|
||||
|
||||
def get_image_paths(self):
|
||||
""" Return image paths that are used to load current data"""
|
||||
return self.image_paths
|
||||
|
||||
def update_learning_rate(self):
|
||||
"""Update learning rates for all the networks; called at the end of every epoch"""
|
||||
old_lr = self.optimizers[0].param_groups[0]['lr']
|
||||
for scheduler in self.schedulers:
|
||||
if self.opt.lr_policy == 'plateau':
|
||||
scheduler.step(self.metric)
|
||||
else:
|
||||
scheduler.step()
|
||||
|
||||
lr = self.optimizers[0].param_groups[0]['lr']
|
||||
print('learning rate %.7f -> %.7f' % (old_lr, lr))
|
||||
|
||||
def get_current_visuals(self):
|
||||
"""Return visualization images. train.py will display these images with visdom, and save the images to a HTML"""
|
||||
visual_ret = OrderedDict()
|
||||
for name in self.visual_names:
|
||||
if isinstance(name, str):
|
||||
visual_ret[name] = getattr(self, name)
|
||||
return visual_ret
|
||||
|
||||
def get_current_losses(self):
|
||||
"""Return traning losses / errors. train.py will print out these errors on console, and save them to a file"""
|
||||
errors_ret = OrderedDict()
|
||||
for name in self.loss_names:
|
||||
if isinstance(name, str):
|
||||
errors_ret[name] = float(getattr(self, 'loss_' + name)) # float(...) works for both scalar tensor and float number
|
||||
return errors_ret
|
||||
|
||||
def save_networks(self, epoch):
|
||||
"""Save all the networks to the disk.
|
||||
|
||||
Parameters:
|
||||
epoch (int) -- current epoch; used in the file name '%s_net_%s.pth' % (epoch, name)
|
||||
"""
|
||||
for name in self.model_names:
|
||||
if isinstance(name, str):
|
||||
save_filename = '%s_net_%s.pth' % (epoch, name)
|
||||
save_path = os.path.join(self.save_dir, save_filename)
|
||||
net = getattr(self, 'net' + name)
|
||||
|
||||
if len(self.gpu_ids) > 0 and torch.cuda.is_available():
|
||||
torch.save(net.module.cpu().state_dict(), save_path)
|
||||
net.cuda(self.gpu_ids[0])
|
||||
else:
|
||||
torch.save(net.cpu().state_dict(), save_path)
|
||||
|
||||
def unload_network(self, name):
|
||||
"""Unload network and gc.
|
||||
"""
|
||||
if isinstance(name, str):
|
||||
net = getattr(self, 'net' + name)
|
||||
del net
|
||||
gc.collect()
|
||||
devices.torch_gc()
|
||||
return None
|
||||
|
||||
def __patch_instance_norm_state_dict(self, state_dict, module, keys, i=0):
|
||||
"""Fix InstanceNorm checkpoints incompatibility (prior to 0.4)"""
|
||||
key = keys[i]
|
||||
if i + 1 == len(keys): # at the end, pointing to a parameter/buffer
|
||||
if module.__class__.__name__.startswith('InstanceNorm') and \
|
||||
(key == 'running_mean' or key == 'running_var'):
|
||||
if getattr(module, key) is None:
|
||||
state_dict.pop('.'.join(keys))
|
||||
if module.__class__.__name__.startswith('InstanceNorm') and \
|
||||
(key == 'num_batches_tracked'):
|
||||
state_dict.pop('.'.join(keys))
|
||||
else:
|
||||
self.__patch_instance_norm_state_dict(state_dict, getattr(module, key), keys, i + 1)
|
||||
|
||||
def load_networks(self, epoch):
|
||||
"""Load all the networks from the disk.
|
||||
|
||||
Parameters:
|
||||
epoch (int) -- current epoch; used in the file name '%s_net_%s.pth' % (epoch, name)
|
||||
"""
|
||||
for name in self.model_names:
|
||||
if isinstance(name, str):
|
||||
load_filename = '%s_net_%s.pth' % (epoch, name)
|
||||
load_path = os.path.join(self.save_dir, load_filename)
|
||||
net = getattr(self, 'net' + name)
|
||||
if isinstance(net, torch.nn.DataParallel):
|
||||
net = net.module
|
||||
# print('Loading depth boost model from %s' % load_path)
|
||||
# if you are using PyTorch newer than 0.4 (e.g., built from
|
||||
# GitHub source), you can remove str() on self.device
|
||||
state_dict = torch.load(load_path, map_location=str(self.device))
|
||||
if hasattr(state_dict, '_metadata'):
|
||||
del state_dict._metadata
|
||||
|
||||
# patch InstanceNorm checkpoints prior to 0.4
|
||||
for key in list(state_dict.keys()): # need to copy keys here because we mutate in loop
|
||||
self.__patch_instance_norm_state_dict(state_dict, net, key.split('.'))
|
||||
net.load_state_dict(state_dict)
|
||||
|
||||
def print_networks(self, verbose):
|
||||
"""Print the total number of parameters in the network and (if verbose) network architecture
|
||||
|
||||
Parameters:
|
||||
verbose (bool) -- if verbose: print the network architecture
|
||||
"""
|
||||
print('---------- Networks initialized -------------')
|
||||
for name in self.model_names:
|
||||
if isinstance(name, str):
|
||||
net = getattr(self, 'net' + name)
|
||||
num_params = 0
|
||||
for param in net.parameters():
|
||||
num_params += param.numel()
|
||||
if verbose:
|
||||
print(net)
|
||||
print('[Network %s] Total number of parameters : %.3f M' % (name, num_params / 1e6))
|
||||
print('-----------------------------------------------')
|
||||
|
||||
def set_requires_grad(self, nets, requires_grad=False):
|
||||
"""Set requies_grad=Fasle for all the networks to avoid unnecessary computations
|
||||
Parameters:
|
||||
nets (network list) -- a list of networks
|
||||
requires_grad (bool) -- whether the networks require gradients or not
|
||||
"""
|
||||
if not isinstance(nets, list):
|
||||
nets = [nets]
|
||||
for net in nets:
|
||||
if net is not None:
|
||||
for param in net.parameters():
|
||||
param.requires_grad = requires_grad
|
||||
@@ -0,0 +1,58 @@
|
||||
import os
|
||||
import torch
|
||||
|
||||
class BaseModelHG():
|
||||
def name(self):
|
||||
return 'BaseModel'
|
||||
|
||||
def initialize(self, opt):
|
||||
self.opt = opt
|
||||
self.gpu_ids = opt.gpu_ids
|
||||
self.isTrain = opt.isTrain
|
||||
self.Tensor = torch.cuda.FloatTensor if self.gpu_ids else torch.Tensor
|
||||
self.save_dir = os.path.join(opt.checkpoints_dir, opt.name)
|
||||
|
||||
def set_input(self, input):
|
||||
self.input = input
|
||||
|
||||
def forward(self):
|
||||
pass
|
||||
|
||||
# used in test time, no backprop
|
||||
def test(self):
|
||||
pass
|
||||
|
||||
def get_image_paths(self):
|
||||
pass
|
||||
|
||||
def optimize_parameters(self):
|
||||
pass
|
||||
|
||||
def get_current_visuals(self):
|
||||
return self.input
|
||||
|
||||
def get_current_errors(self):
|
||||
return {}
|
||||
|
||||
def save(self, label):
|
||||
pass
|
||||
|
||||
# helper saving function that can be used by subclasses
|
||||
def save_network(self, network, network_label, epoch_label, gpu_ids):
|
||||
save_filename = '_%s_net_%s.pth' % (epoch_label, network_label)
|
||||
save_path = os.path.join(self.save_dir, save_filename)
|
||||
torch.save(network.cpu().state_dict(), save_path)
|
||||
if len(gpu_ids) and torch.cuda.is_available():
|
||||
network.cuda(device_id=gpu_ids[0])
|
||||
|
||||
# helper loading function that can be used by subclasses
|
||||
def load_network(self, network, network_label, epoch_label):
|
||||
save_filename = '%s_net_%s.pth' % (epoch_label, network_label)
|
||||
save_path = os.path.join(self.save_dir, save_filename)
|
||||
print(save_path)
|
||||
model = torch.load(save_path)
|
||||
return model
|
||||
# network.load_state_dict(torch.load(save_path))
|
||||
|
||||
def update_learning_rate():
|
||||
pass
|
||||
@@ -0,0 +1,623 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
from torch.nn import init
|
||||
import functools
|
||||
from torch.optim import lr_scheduler
|
||||
|
||||
|
||||
###############################################################################
|
||||
# Helper Functions
|
||||
###############################################################################
|
||||
|
||||
|
||||
class Identity(nn.Module):
|
||||
def forward(self, x):
|
||||
return x
|
||||
|
||||
|
||||
def get_norm_layer(norm_type='instance'):
|
||||
"""Return a normalization layer
|
||||
|
||||
Parameters:
|
||||
norm_type (str) -- the name of the normalization layer: batch | instance | none
|
||||
|
||||
For BatchNorm, we use learnable affine parameters and track running statistics (mean/stddev).
|
||||
For InstanceNorm, we do not use learnable affine parameters. We do not track running statistics.
|
||||
"""
|
||||
if norm_type == 'batch':
|
||||
norm_layer = functools.partial(nn.BatchNorm2d, affine=True, track_running_stats=True)
|
||||
elif norm_type == 'instance':
|
||||
norm_layer = functools.partial(nn.InstanceNorm2d, affine=False, track_running_stats=False)
|
||||
elif norm_type == 'none':
|
||||
def norm_layer(x): return Identity()
|
||||
else:
|
||||
raise NotImplementedError('normalization layer [%s] is not found' % norm_type)
|
||||
return norm_layer
|
||||
|
||||
|
||||
def get_scheduler(optimizer, opt):
|
||||
"""Return a learning rate scheduler
|
||||
|
||||
Parameters:
|
||||
optimizer -- the optimizer of the network
|
||||
opt (option class) -- stores all the experiment flags; needs to be a subclass of BaseOptions.
|
||||
opt.lr_policy is the name of learning rate policy: linear | step | plateau | cosine
|
||||
|
||||
For 'linear', we keep the same learning rate for the first <opt.n_epochs> epochs
|
||||
and linearly decay the rate to zero over the next <opt.n_epochs_decay> epochs.
|
||||
For other schedulers (step, plateau, and cosine), we use the default PyTorch schedulers.
|
||||
See https://pytorch.org/docs/stable/optim.html for more details.
|
||||
"""
|
||||
if opt.lr_policy == 'linear':
|
||||
def lambda_rule(epoch):
|
||||
lr_l = 1.0 - max(0, epoch + opt.epoch_count - opt.n_epochs) / float(opt.n_epochs_decay + 1)
|
||||
return lr_l
|
||||
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lambda_rule)
|
||||
elif opt.lr_policy == 'step':
|
||||
scheduler = lr_scheduler.StepLR(optimizer, step_size=opt.lr_decay_iters, gamma=0.1)
|
||||
elif opt.lr_policy == 'plateau':
|
||||
scheduler = lr_scheduler.ReduceLROnPlateau(optimizer, mode='min', factor=0.2, threshold=0.01, patience=5)
|
||||
elif opt.lr_policy == 'cosine':
|
||||
scheduler = lr_scheduler.CosineAnnealingLR(optimizer, T_max=opt.n_epochs, eta_min=0)
|
||||
else:
|
||||
return NotImplementedError('learning rate policy [%s] is not implemented', opt.lr_policy)
|
||||
return scheduler
|
||||
|
||||
|
||||
def init_weights(net, init_type='normal', init_gain=0.02):
|
||||
"""Initialize network weights.
|
||||
|
||||
Parameters:
|
||||
net (network) -- network to be initialized
|
||||
init_type (str) -- the name of an initialization method: normal | xavier | kaiming | orthogonal
|
||||
init_gain (float) -- scaling factor for normal, xavier and orthogonal.
|
||||
|
||||
We use 'normal' in the original pix2pix and CycleGAN paper. But xavier and kaiming might
|
||||
work better for some applications. Feel free to try yourself.
|
||||
"""
|
||||
def init_func(m): # define the initialization function
|
||||
classname = m.__class__.__name__
|
||||
if hasattr(m, 'weight') and (classname.find('Conv') != -1 or classname.find('Linear') != -1):
|
||||
if init_type == 'normal':
|
||||
init.normal_(m.weight.data, 0.0, init_gain)
|
||||
elif init_type == 'xavier':
|
||||
init.xavier_normal_(m.weight.data, gain=init_gain)
|
||||
elif init_type == 'kaiming':
|
||||
init.kaiming_normal_(m.weight.data, a=0, mode='fan_in')
|
||||
elif init_type == 'orthogonal':
|
||||
init.orthogonal_(m.weight.data, gain=init_gain)
|
||||
else:
|
||||
raise NotImplementedError('initialization method [%s] is not implemented' % init_type)
|
||||
if hasattr(m, 'bias') and m.bias is not None:
|
||||
init.constant_(m.bias.data, 0.0)
|
||||
elif classname.find('BatchNorm2d') != -1: # BatchNorm Layer's weight is not a matrix; only normal distribution applies.
|
||||
init.normal_(m.weight.data, 1.0, init_gain)
|
||||
init.constant_(m.bias.data, 0.0)
|
||||
|
||||
# print('initialize network with %s' % init_type)
|
||||
net.apply(init_func) # apply the initialization function <init_func>
|
||||
|
||||
|
||||
def init_net(net, init_type='normal', init_gain=0.02, gpu_ids=[]):
|
||||
"""Initialize a network: 1. register CPU/GPU device (with multi-GPU support); 2. initialize the network weights
|
||||
Parameters:
|
||||
net (network) -- the network to be initialized
|
||||
init_type (str) -- the name of an initialization method: normal | xavier | kaiming | orthogonal
|
||||
gain (float) -- scaling factor for normal, xavier and orthogonal.
|
||||
gpu_ids (int list) -- which GPUs the network runs on: e.g., 0,1,2
|
||||
|
||||
Return an initialized network.
|
||||
"""
|
||||
if len(gpu_ids) > 0:
|
||||
assert(torch.cuda.is_available())
|
||||
net.to(gpu_ids[0])
|
||||
net = torch.nn.DataParallel(net, gpu_ids) # multi-GPUs
|
||||
init_weights(net, init_type, init_gain=init_gain)
|
||||
return net
|
||||
|
||||
|
||||
def define_G(input_nc, output_nc, ngf, netG, norm='batch', use_dropout=False, init_type='normal', init_gain=0.02, gpu_ids=[]):
|
||||
"""Create a generator
|
||||
|
||||
Parameters:
|
||||
input_nc (int) -- the number of channels in input images
|
||||
output_nc (int) -- the number of channels in output images
|
||||
ngf (int) -- the number of filters in the last conv layer
|
||||
netG (str) -- the architecture's name: resnet_9blocks | resnet_6blocks | unet_256 | unet_128
|
||||
norm (str) -- the name of normalization layers used in the network: batch | instance | none
|
||||
use_dropout (bool) -- if use dropout layers.
|
||||
init_type (str) -- the name of our initialization method.
|
||||
init_gain (float) -- scaling factor for normal, xavier and orthogonal.
|
||||
gpu_ids (int list) -- which GPUs the network runs on: e.g., 0,1,2
|
||||
|
||||
Returns a generator
|
||||
|
||||
Our current implementation provides two types of generators:
|
||||
U-Net: [unet_128] (for 128x128 input images) and [unet_256] (for 256x256 input images)
|
||||
The original U-Net paper: https://arxiv.org/abs/1505.04597
|
||||
|
||||
Resnet-based generator: [resnet_6blocks] (with 6 Resnet blocks) and [resnet_9blocks] (with 9 Resnet blocks)
|
||||
Resnet-based generator consists of several Resnet blocks between a few downsampling/upsampling operations.
|
||||
We adapt Torch code from Justin Johnson's neural style transfer project (https://github.com/jcjohnson/fast-neural-style).
|
||||
|
||||
|
||||
The generator has been initialized by <init_net>. It uses RELU for non-linearity.
|
||||
"""
|
||||
net = None
|
||||
norm_layer = get_norm_layer(norm_type=norm)
|
||||
|
||||
if netG == 'resnet_9blocks':
|
||||
net = ResnetGenerator(input_nc, output_nc, ngf, norm_layer=norm_layer, use_dropout=use_dropout, n_blocks=9)
|
||||
elif netG == 'resnet_6blocks':
|
||||
net = ResnetGenerator(input_nc, output_nc, ngf, norm_layer=norm_layer, use_dropout=use_dropout, n_blocks=6)
|
||||
elif netG == 'resnet_12blocks':
|
||||
net = ResnetGenerator(input_nc, output_nc, ngf, norm_layer=norm_layer, use_dropout=use_dropout, n_blocks=12)
|
||||
elif netG == 'unet_128':
|
||||
net = UnetGenerator(input_nc, output_nc, 7, ngf, norm_layer=norm_layer, use_dropout=use_dropout)
|
||||
elif netG == 'unet_256':
|
||||
net = UnetGenerator(input_nc, output_nc, 8, ngf, norm_layer=norm_layer, use_dropout=use_dropout)
|
||||
elif netG == 'unet_672':
|
||||
net = UnetGenerator(input_nc, output_nc, 5, ngf, norm_layer=norm_layer, use_dropout=use_dropout)
|
||||
elif netG == 'unet_960':
|
||||
net = UnetGenerator(input_nc, output_nc, 6, ngf, norm_layer=norm_layer, use_dropout=use_dropout)
|
||||
elif netG == 'unet_1024':
|
||||
net = UnetGenerator(input_nc, output_nc, 10, ngf, norm_layer=norm_layer, use_dropout=use_dropout)
|
||||
else:
|
||||
raise NotImplementedError('Generator model name [%s] is not recognized' % netG)
|
||||
return init_net(net, init_type, init_gain, gpu_ids)
|
||||
|
||||
|
||||
def define_D(input_nc, ndf, netD, n_layers_D=3, norm='batch', init_type='normal', init_gain=0.02, gpu_ids=[]):
|
||||
"""Create a discriminator
|
||||
|
||||
Parameters:
|
||||
input_nc (int) -- the number of channels in input images
|
||||
ndf (int) -- the number of filters in the first conv layer
|
||||
netD (str) -- the architecture's name: basic | n_layers | pixel
|
||||
n_layers_D (int) -- the number of conv layers in the discriminator; effective when netD=='n_layers'
|
||||
norm (str) -- the type of normalization layers used in the network.
|
||||
init_type (str) -- the name of the initialization method.
|
||||
init_gain (float) -- scaling factor for normal, xavier and orthogonal.
|
||||
gpu_ids (int list) -- which GPUs the network runs on: e.g., 0,1,2
|
||||
|
||||
Returns a discriminator
|
||||
|
||||
Our current implementation provides three types of discriminators:
|
||||
[basic]: 'PatchGAN' classifier described in the original pix2pix paper.
|
||||
It can classify whether 70×70 overlapping patches are real or fake.
|
||||
Such a patch-level discriminator architecture has fewer parameters
|
||||
than a full-image discriminator and can work on arbitrarily-sized images
|
||||
in a fully convolutional fashion.
|
||||
|
||||
[n_layers]: With this mode, you can specify the number of conv layers in the discriminator
|
||||
with the parameter <n_layers_D> (default=3 as used in [basic] (PatchGAN).)
|
||||
|
||||
[pixel]: 1x1 PixelGAN discriminator can classify whether a pixel is real or not.
|
||||
It encourages greater color diversity but has no effect on spatial statistics.
|
||||
|
||||
The discriminator has been initialized by <init_net>. It uses Leakly RELU for non-linearity.
|
||||
"""
|
||||
net = None
|
||||
norm_layer = get_norm_layer(norm_type=norm)
|
||||
|
||||
if netD == 'basic': # default PatchGAN classifier
|
||||
net = NLayerDiscriminator(input_nc, ndf, n_layers=3, norm_layer=norm_layer)
|
||||
elif netD == 'n_layers': # more options
|
||||
net = NLayerDiscriminator(input_nc, ndf, n_layers_D, norm_layer=norm_layer)
|
||||
elif netD == 'pixel': # classify if each pixel is real or fake
|
||||
net = PixelDiscriminator(input_nc, ndf, norm_layer=norm_layer)
|
||||
else:
|
||||
raise NotImplementedError('Discriminator model name [%s] is not recognized' % netD)
|
||||
return init_net(net, init_type, init_gain, gpu_ids)
|
||||
|
||||
|
||||
##############################################################################
|
||||
# Classes
|
||||
##############################################################################
|
||||
class GANLoss(nn.Module):
|
||||
"""Define different GAN objectives.
|
||||
|
||||
The GANLoss class abstracts away the need to create the target label tensor
|
||||
that has the same size as the input.
|
||||
"""
|
||||
|
||||
def __init__(self, gan_mode, target_real_label=1.0, target_fake_label=0.0):
|
||||
""" Initialize the GANLoss class.
|
||||
|
||||
Parameters:
|
||||
gan_mode (str) - - the type of GAN objective. It currently supports vanilla, lsgan, and wgangp.
|
||||
target_real_label (bool) - - label for a real image
|
||||
target_fake_label (bool) - - label of a fake image
|
||||
|
||||
Note: Do not use sigmoid as the last layer of Discriminator.
|
||||
LSGAN needs no sigmoid. vanilla GANs will handle it with BCEWithLogitsLoss.
|
||||
"""
|
||||
super(GANLoss, self).__init__()
|
||||
self.register_buffer('real_label', torch.tensor(target_real_label))
|
||||
self.register_buffer('fake_label', torch.tensor(target_fake_label))
|
||||
self.gan_mode = gan_mode
|
||||
if gan_mode == 'lsgan':
|
||||
self.loss = nn.MSELoss()
|
||||
elif gan_mode == 'vanilla':
|
||||
self.loss = nn.BCEWithLogitsLoss()
|
||||
elif gan_mode in ['wgangp']:
|
||||
self.loss = None
|
||||
else:
|
||||
raise NotImplementedError('gan mode %s not implemented' % gan_mode)
|
||||
|
||||
def get_target_tensor(self, prediction, target_is_real):
|
||||
"""Create label tensors with the same size as the input.
|
||||
|
||||
Parameters:
|
||||
prediction (tensor) - - tpyically the prediction from a discriminator
|
||||
target_is_real (bool) - - if the ground truth label is for real images or fake images
|
||||
|
||||
Returns:
|
||||
A label tensor filled with ground truth label, and with the size of the input
|
||||
"""
|
||||
|
||||
if target_is_real:
|
||||
target_tensor = self.real_label
|
||||
else:
|
||||
target_tensor = self.fake_label
|
||||
return target_tensor.expand_as(prediction)
|
||||
|
||||
def __call__(self, prediction, target_is_real):
|
||||
"""Calculate loss given Discriminator's output and grount truth labels.
|
||||
|
||||
Parameters:
|
||||
prediction (tensor) - - tpyically the prediction output from a discriminator
|
||||
target_is_real (bool) - - if the ground truth label is for real images or fake images
|
||||
|
||||
Returns:
|
||||
the calculated loss.
|
||||
"""
|
||||
if self.gan_mode in ['lsgan', 'vanilla']:
|
||||
target_tensor = self.get_target_tensor(prediction, target_is_real)
|
||||
loss = self.loss(prediction, target_tensor)
|
||||
elif self.gan_mode == 'wgangp':
|
||||
if target_is_real:
|
||||
loss = -prediction.mean()
|
||||
else:
|
||||
loss = prediction.mean()
|
||||
return loss
|
||||
|
||||
|
||||
def cal_gradient_penalty(netD, real_data, fake_data, device, type='mixed', constant=1.0, lambda_gp=10.0):
|
||||
"""Calculate the gradient penalty loss, used in WGAN-GP paper https://arxiv.org/abs/1704.00028
|
||||
|
||||
Arguments:
|
||||
netD (network) -- discriminator network
|
||||
real_data (tensor array) -- real images
|
||||
fake_data (tensor array) -- generated images from the generator
|
||||
device (str) -- GPU / CPU: from torch.device('cuda:{}'.format(self.gpu_ids[0])) if self.gpu_ids else torch.device('cpu')
|
||||
type (str) -- if we mix real and fake data or not [real | fake | mixed].
|
||||
constant (float) -- the constant used in formula ( ||gradient||_2 - constant)^2
|
||||
lambda_gp (float) -- weight for this loss
|
||||
|
||||
Returns the gradient penalty loss
|
||||
"""
|
||||
if lambda_gp > 0.0:
|
||||
if type == 'real': # either use real images, fake images, or a linear interpolation of two.
|
||||
interpolatesv = real_data
|
||||
elif type == 'fake':
|
||||
interpolatesv = fake_data
|
||||
elif type == 'mixed':
|
||||
alpha = torch.rand(real_data.shape[0], 1, device=device)
|
||||
alpha = alpha.expand(real_data.shape[0], real_data.nelement() // real_data.shape[0]).contiguous().view(*real_data.shape)
|
||||
interpolatesv = alpha * real_data + ((1 - alpha) * fake_data)
|
||||
else:
|
||||
raise NotImplementedError('{} not implemented'.format(type))
|
||||
interpolatesv.requires_grad_(True)
|
||||
disc_interpolates = netD(interpolatesv)
|
||||
gradients = torch.autograd.grad(outputs=disc_interpolates, inputs=interpolatesv,
|
||||
grad_outputs=torch.ones(disc_interpolates.size()).to(device),
|
||||
create_graph=True, retain_graph=True, only_inputs=True)
|
||||
gradients = gradients[0].view(real_data.size(0), -1) # flat the data
|
||||
gradient_penalty = (((gradients + 1e-16).norm(2, dim=1) - constant) ** 2).mean() * lambda_gp # added eps
|
||||
return gradient_penalty, gradients
|
||||
else:
|
||||
return 0.0, None
|
||||
|
||||
|
||||
class ResnetGenerator(nn.Module):
|
||||
"""Resnet-based generator that consists of Resnet blocks between a few downsampling/upsampling operations.
|
||||
|
||||
We adapt Torch code and idea from Justin Johnson's neural style transfer project(https://github.com/jcjohnson/fast-neural-style)
|
||||
"""
|
||||
|
||||
def __init__(self, input_nc, output_nc, ngf=64, norm_layer=nn.BatchNorm2d, use_dropout=False, n_blocks=6, padding_type='reflect'):
|
||||
"""Construct a Resnet-based generator
|
||||
|
||||
Parameters:
|
||||
input_nc (int) -- the number of channels in input images
|
||||
output_nc (int) -- the number of channels in output images
|
||||
ngf (int) -- the number of filters in the last conv layer
|
||||
norm_layer -- normalization layer
|
||||
use_dropout (bool) -- if use dropout layers
|
||||
n_blocks (int) -- the number of ResNet blocks
|
||||
padding_type (str) -- the name of padding layer in conv layers: reflect | replicate | zero
|
||||
"""
|
||||
assert(n_blocks >= 0)
|
||||
super(ResnetGenerator, self).__init__()
|
||||
if type(norm_layer) == functools.partial:
|
||||
use_bias = norm_layer.func == nn.InstanceNorm2d
|
||||
else:
|
||||
use_bias = norm_layer == nn.InstanceNorm2d
|
||||
|
||||
model = [nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(input_nc, ngf, kernel_size=7, padding=0, bias=use_bias),
|
||||
norm_layer(ngf),
|
||||
nn.ReLU(True)]
|
||||
|
||||
n_downsampling = 2
|
||||
for i in range(n_downsampling): # add downsampling layers
|
||||
mult = 2 ** i
|
||||
model += [nn.Conv2d(ngf * mult, ngf * mult * 2, kernel_size=3, stride=2, padding=1, bias=use_bias),
|
||||
norm_layer(ngf * mult * 2),
|
||||
nn.ReLU(True)]
|
||||
|
||||
mult = 2 ** n_downsampling
|
||||
for i in range(n_blocks): # add ResNet blocks
|
||||
|
||||
model += [ResnetBlock(ngf * mult, padding_type=padding_type, norm_layer=norm_layer, use_dropout=use_dropout, use_bias=use_bias)]
|
||||
|
||||
for i in range(n_downsampling): # add upsampling layers
|
||||
mult = 2 ** (n_downsampling - i)
|
||||
model += [nn.ConvTranspose2d(ngf * mult, int(ngf * mult / 2),
|
||||
kernel_size=3, stride=2,
|
||||
padding=1, output_padding=1,
|
||||
bias=use_bias),
|
||||
norm_layer(int(ngf * mult / 2)),
|
||||
nn.ReLU(True)]
|
||||
model += [nn.ReflectionPad2d(3)]
|
||||
model += [nn.Conv2d(ngf, output_nc, kernel_size=7, padding=0)]
|
||||
model += [nn.Tanh()]
|
||||
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, input):
|
||||
"""Standard forward"""
|
||||
return self.model(input)
|
||||
|
||||
|
||||
class ResnetBlock(nn.Module):
|
||||
"""Define a Resnet block"""
|
||||
|
||||
def __init__(self, dim, padding_type, norm_layer, use_dropout, use_bias):
|
||||
"""Initialize the Resnet block
|
||||
|
||||
A resnet block is a conv block with skip connections
|
||||
We construct a conv block with build_conv_block function,
|
||||
and implement skip connections in <forward> function.
|
||||
Original Resnet paper: https://arxiv.org/pdf/1512.03385.pdf
|
||||
"""
|
||||
super(ResnetBlock, self).__init__()
|
||||
self.conv_block = self.build_conv_block(dim, padding_type, norm_layer, use_dropout, use_bias)
|
||||
|
||||
def build_conv_block(self, dim, padding_type, norm_layer, use_dropout, use_bias):
|
||||
"""Construct a convolutional block.
|
||||
|
||||
Parameters:
|
||||
dim (int) -- the number of channels in the conv layer.
|
||||
padding_type (str) -- the name of padding layer: reflect | replicate | zero
|
||||
norm_layer -- normalization layer
|
||||
use_dropout (bool) -- if use dropout layers.
|
||||
use_bias (bool) -- if the conv layer uses bias or not
|
||||
|
||||
Returns a conv block (with a conv layer, a normalization layer, and a non-linearity layer (ReLU))
|
||||
"""
|
||||
conv_block = []
|
||||
p = 0
|
||||
if padding_type == 'reflect':
|
||||
conv_block += [nn.ReflectionPad2d(1)]
|
||||
elif padding_type == 'replicate':
|
||||
conv_block += [nn.ReplicationPad2d(1)]
|
||||
elif padding_type == 'zero':
|
||||
p = 1
|
||||
else:
|
||||
raise NotImplementedError('padding [%s] is not implemented' % padding_type)
|
||||
|
||||
conv_block += [nn.Conv2d(dim, dim, kernel_size=3, padding=p, bias=use_bias), norm_layer(dim), nn.ReLU(True)]
|
||||
if use_dropout:
|
||||
conv_block += [nn.Dropout(0.5)]
|
||||
|
||||
p = 0
|
||||
if padding_type == 'reflect':
|
||||
conv_block += [nn.ReflectionPad2d(1)]
|
||||
elif padding_type == 'replicate':
|
||||
conv_block += [nn.ReplicationPad2d(1)]
|
||||
elif padding_type == 'zero':
|
||||
p = 1
|
||||
else:
|
||||
raise NotImplementedError('padding [%s] is not implemented' % padding_type)
|
||||
conv_block += [nn.Conv2d(dim, dim, kernel_size=3, padding=p, bias=use_bias), norm_layer(dim)]
|
||||
|
||||
return nn.Sequential(*conv_block)
|
||||
|
||||
def forward(self, x):
|
||||
"""Forward function (with skip connections)"""
|
||||
out = x + self.conv_block(x) # add skip connections
|
||||
return out
|
||||
|
||||
|
||||
class UnetGenerator(nn.Module):
|
||||
"""Create a Unet-based generator"""
|
||||
|
||||
def __init__(self, input_nc, output_nc, num_downs, ngf=64, norm_layer=nn.BatchNorm2d, use_dropout=False):
|
||||
"""Construct a Unet generator
|
||||
Parameters:
|
||||
input_nc (int) -- the number of channels in input images
|
||||
output_nc (int) -- the number of channels in output images
|
||||
num_downs (int) -- the number of downsamplings in UNet. For example, # if |num_downs| == 7,
|
||||
image of size 128x128 will become of size 1x1 # at the bottleneck
|
||||
ngf (int) -- the number of filters in the last conv layer
|
||||
norm_layer -- normalization layer
|
||||
|
||||
We construct the U-Net from the innermost layer to the outermost layer.
|
||||
It is a recursive process.
|
||||
"""
|
||||
super(UnetGenerator, self).__init__()
|
||||
# construct unet structure
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 8, ngf * 8, input_nc=None, submodule=None, norm_layer=norm_layer, innermost=True) # add the innermost layer
|
||||
for i in range(num_downs - 5): # add intermediate layers with ngf * 8 filters
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 8, ngf * 8, input_nc=None, submodule=unet_block, norm_layer=norm_layer, use_dropout=use_dropout)
|
||||
# gradually reduce the number of filters from ngf * 8 to ngf
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 4, ngf * 8, input_nc=None, submodule=unet_block, norm_layer=norm_layer)
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 2, ngf * 4, input_nc=None, submodule=unet_block, norm_layer=norm_layer)
|
||||
unet_block = UnetSkipConnectionBlock(ngf, ngf * 2, input_nc=None, submodule=unet_block, norm_layer=norm_layer)
|
||||
self.model = UnetSkipConnectionBlock(output_nc, ngf, input_nc=input_nc, submodule=unet_block, outermost=True, norm_layer=norm_layer) # add the outermost layer
|
||||
|
||||
def forward(self, input):
|
||||
"""Standard forward"""
|
||||
return self.model(input)
|
||||
|
||||
|
||||
class UnetSkipConnectionBlock(nn.Module):
|
||||
"""Defines the Unet submodule with skip connection.
|
||||
X -------------------identity----------------------
|
||||
|-- downsampling -- |submodule| -- upsampling --|
|
||||
"""
|
||||
|
||||
def __init__(self, outer_nc, inner_nc, input_nc=None,
|
||||
submodule=None, outermost=False, innermost=False, norm_layer=nn.BatchNorm2d, use_dropout=False):
|
||||
"""Construct a Unet submodule with skip connections.
|
||||
|
||||
Parameters:
|
||||
outer_nc (int) -- the number of filters in the outer conv layer
|
||||
inner_nc (int) -- the number of filters in the inner conv layer
|
||||
input_nc (int) -- the number of channels in input images/features
|
||||
submodule (UnetSkipConnectionBlock) -- previously defined submodules
|
||||
outermost (bool) -- if this module is the outermost module
|
||||
innermost (bool) -- if this module is the innermost module
|
||||
norm_layer -- normalization layer
|
||||
use_dropout (bool) -- if use dropout layers.
|
||||
"""
|
||||
super(UnetSkipConnectionBlock, self).__init__()
|
||||
self.outermost = outermost
|
||||
if type(norm_layer) == functools.partial:
|
||||
use_bias = norm_layer.func == nn.InstanceNorm2d
|
||||
else:
|
||||
use_bias = norm_layer == nn.InstanceNorm2d
|
||||
if input_nc is None:
|
||||
input_nc = outer_nc
|
||||
downconv = nn.Conv2d(input_nc, inner_nc, kernel_size=4,
|
||||
stride=2, padding=1, bias=use_bias)
|
||||
downrelu = nn.LeakyReLU(0.2, True)
|
||||
downnorm = norm_layer(inner_nc)
|
||||
uprelu = nn.ReLU(True)
|
||||
upnorm = norm_layer(outer_nc)
|
||||
|
||||
if outermost:
|
||||
upconv = nn.ConvTranspose2d(inner_nc * 2, outer_nc,
|
||||
kernel_size=4, stride=2,
|
||||
padding=1)
|
||||
down = [downconv]
|
||||
up = [uprelu, upconv, nn.Tanh()]
|
||||
model = down + [submodule] + up
|
||||
elif innermost:
|
||||
upconv = nn.ConvTranspose2d(inner_nc, outer_nc,
|
||||
kernel_size=4, stride=2,
|
||||
padding=1, bias=use_bias)
|
||||
down = [downrelu, downconv]
|
||||
up = [uprelu, upconv, upnorm]
|
||||
model = down + up
|
||||
else:
|
||||
upconv = nn.ConvTranspose2d(inner_nc * 2, outer_nc,
|
||||
kernel_size=4, stride=2,
|
||||
padding=1, bias=use_bias)
|
||||
down = [downrelu, downconv, downnorm]
|
||||
up = [uprelu, upconv, upnorm]
|
||||
|
||||
if use_dropout:
|
||||
model = down + [submodule] + up + [nn.Dropout(0.5)]
|
||||
else:
|
||||
model = down + [submodule] + up
|
||||
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, x):
|
||||
if self.outermost:
|
||||
return self.model(x)
|
||||
else: # add skip connections
|
||||
return torch.cat([x, self.model(x)], 1)
|
||||
|
||||
|
||||
class NLayerDiscriminator(nn.Module):
|
||||
"""Defines a PatchGAN discriminator"""
|
||||
|
||||
def __init__(self, input_nc, ndf=64, n_layers=3, norm_layer=nn.BatchNorm2d):
|
||||
"""Construct a PatchGAN discriminator
|
||||
|
||||
Parameters:
|
||||
input_nc (int) -- the number of channels in input images
|
||||
ndf (int) -- the number of filters in the last conv layer
|
||||
n_layers (int) -- the number of conv layers in the discriminator
|
||||
norm_layer -- normalization layer
|
||||
"""
|
||||
super(NLayerDiscriminator, self).__init__()
|
||||
if type(norm_layer) == functools.partial: # no need to use bias as BatchNorm2d has affine parameters
|
||||
use_bias = norm_layer.func == nn.InstanceNorm2d
|
||||
else:
|
||||
use_bias = norm_layer == nn.InstanceNorm2d
|
||||
|
||||
kw = 4
|
||||
padw = 1
|
||||
sequence = [nn.Conv2d(input_nc, ndf, kernel_size=kw, stride=2, padding=padw), nn.LeakyReLU(0.2, True)]
|
||||
nf_mult = 1
|
||||
nf_mult_prev = 1
|
||||
for n in range(1, n_layers): # gradually increase the number of filters
|
||||
nf_mult_prev = nf_mult
|
||||
nf_mult = min(2 ** n, 8)
|
||||
sequence += [
|
||||
nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult, kernel_size=kw, stride=2, padding=padw, bias=use_bias),
|
||||
norm_layer(ndf * nf_mult),
|
||||
nn.LeakyReLU(0.2, True)
|
||||
]
|
||||
|
||||
nf_mult_prev = nf_mult
|
||||
nf_mult = min(2 ** n_layers, 8)
|
||||
sequence += [
|
||||
nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult, kernel_size=kw, stride=1, padding=padw, bias=use_bias),
|
||||
norm_layer(ndf * nf_mult),
|
||||
nn.LeakyReLU(0.2, True)
|
||||
]
|
||||
|
||||
sequence += [nn.Conv2d(ndf * nf_mult, 1, kernel_size=kw, stride=1, padding=padw)] # output 1 channel prediction map
|
||||
self.model = nn.Sequential(*sequence)
|
||||
|
||||
def forward(self, input):
|
||||
"""Standard forward."""
|
||||
return self.model(input)
|
||||
|
||||
|
||||
class PixelDiscriminator(nn.Module):
|
||||
"""Defines a 1x1 PatchGAN discriminator (pixelGAN)"""
|
||||
|
||||
def __init__(self, input_nc, ndf=64, norm_layer=nn.BatchNorm2d):
|
||||
"""Construct a 1x1 PatchGAN discriminator
|
||||
|
||||
Parameters:
|
||||
input_nc (int) -- the number of channels in input images
|
||||
ndf (int) -- the number of filters in the last conv layer
|
||||
norm_layer -- normalization layer
|
||||
"""
|
||||
super(PixelDiscriminator, self).__init__()
|
||||
if type(norm_layer) == functools.partial: # no need to use bias as BatchNorm2d has affine parameters
|
||||
use_bias = norm_layer.func == nn.InstanceNorm2d
|
||||
else:
|
||||
use_bias = norm_layer == nn.InstanceNorm2d
|
||||
|
||||
self.net = [
|
||||
nn.Conv2d(input_nc, ndf, kernel_size=1, stride=1, padding=0),
|
||||
nn.LeakyReLU(0.2, True),
|
||||
nn.Conv2d(ndf, ndf * 2, kernel_size=1, stride=1, padding=0, bias=use_bias),
|
||||
norm_layer(ndf * 2),
|
||||
nn.LeakyReLU(0.2, True),
|
||||
nn.Conv2d(ndf * 2, 1, kernel_size=1, stride=1, padding=0, bias=use_bias)]
|
||||
|
||||
self.net = nn.Sequential(*self.net)
|
||||
|
||||
def forward(self, input):
|
||||
"""Standard forward."""
|
||||
return self.net(input)
|
||||
@@ -0,0 +1,155 @@
|
||||
import torch
|
||||
from .base_model import BaseModel
|
||||
from . import networks
|
||||
|
||||
|
||||
class Pix2Pix4DepthModel(BaseModel):
|
||||
""" This class implements the pix2pix model, for learning a mapping from input images to output images given paired data.
|
||||
|
||||
The model training requires '--dataset_mode aligned' dataset.
|
||||
By default, it uses a '--netG unet256' U-Net generator,
|
||||
a '--netD basic' discriminator (PatchGAN),
|
||||
and a '--gan_mode' vanilla GAN loss (the cross-entropy objective used in the orignal GAN paper).
|
||||
|
||||
pix2pix paper: https://arxiv.org/pdf/1611.07004.pdf
|
||||
"""
|
||||
@staticmethod
|
||||
def modify_commandline_options(parser, is_train=True):
|
||||
"""Add new dataset-specific options, and rewrite default values for existing options.
|
||||
|
||||
Parameters:
|
||||
parser -- original option parser
|
||||
is_train (bool) -- whether training phase or test phase. You can use this flag to add training-specific or test-specific options.
|
||||
|
||||
Returns:
|
||||
the modified parser.
|
||||
|
||||
For pix2pix, we do not use image buffer
|
||||
The training objective is: GAN Loss + lambda_L1 * ||G(A)-B||_1
|
||||
By default, we use vanilla GAN loss, UNet with batchnorm, and aligned datasets.
|
||||
"""
|
||||
# changing the default values to match the pix2pix paper (https://phillipi.github.io/pix2pix/)
|
||||
parser.set_defaults(input_nc=2,output_nc=1,norm='none', netG='unet_1024', dataset_mode='depthmerge')
|
||||
if is_train:
|
||||
parser.set_defaults(pool_size=0, gan_mode='vanilla',)
|
||||
parser.add_argument('--lambda_L1', type=float, default=1000, help='weight for L1 loss')
|
||||
return parser
|
||||
|
||||
def __init__(self, opt):
|
||||
"""Initialize the pix2pix class.
|
||||
|
||||
Parameters:
|
||||
opt (Option class)-- stores all the experiment flags; needs to be a subclass of BaseOptions
|
||||
"""
|
||||
BaseModel.__init__(self, opt)
|
||||
# specify the training losses you want to print out. The training/test scripts will call <BaseModel.get_current_losses>
|
||||
|
||||
self.loss_names = ['G_GAN', 'G_L1', 'D_real', 'D_fake']
|
||||
# self.loss_names = ['G_L1']
|
||||
|
||||
# specify the images you want to save/display. The training/test scripts will call <BaseModel.get_current_visuals>
|
||||
if self.isTrain:
|
||||
self.visual_names = ['outer','inner', 'fake_B', 'real_B']
|
||||
else:
|
||||
self.visual_names = ['fake_B']
|
||||
|
||||
# specify the models you want to save to the disk. The training/test scripts will call <BaseModel.save_networks> and <BaseModel.load_networks>
|
||||
if self.isTrain:
|
||||
self.model_names = ['G','D']
|
||||
else: # during test time, only load G
|
||||
self.model_names = ['G']
|
||||
|
||||
# define networks (both generator and discriminator)
|
||||
self.netG = networks.define_G(opt.input_nc, opt.output_nc, 64, 'unet_1024', 'none',
|
||||
False, 'normal', 0.02, self.gpu_ids)
|
||||
|
||||
if self.isTrain: # define a discriminator; conditional GANs need to take both input and output images; Therefore, #channels for D is input_nc + output_nc
|
||||
self.netD = networks.define_D(opt.input_nc + opt.output_nc, opt.ndf, opt.netD,
|
||||
opt.n_layers_D, opt.norm, opt.init_type, opt.init_gain, self.gpu_ids)
|
||||
|
||||
if self.isTrain:
|
||||
# define loss functions
|
||||
self.criterionGAN = networks.GANLoss(opt.gan_mode).to(self.device)
|
||||
self.criterionL1 = torch.nn.L1Loss()
|
||||
# initialize optimizers; schedulers will be automatically created by function <BaseModel.setup>.
|
||||
self.optimizer_G = torch.optim.Adam(self.netG.parameters(), lr=1e-4, betas=(opt.beta1, 0.999))
|
||||
self.optimizer_D = torch.optim.Adam(self.netD.parameters(), lr=2e-06, betas=(opt.beta1, 0.999))
|
||||
self.optimizers.append(self.optimizer_G)
|
||||
self.optimizers.append(self.optimizer_D)
|
||||
|
||||
def set_input_train(self, input):
|
||||
self.outer = input['data_outer'].to(self.device)
|
||||
self.outer = torch.nn.functional.interpolate(self.outer,(1024,1024),mode='bilinear',align_corners=False)
|
||||
|
||||
self.inner = input['data_inner'].to(self.device)
|
||||
self.inner = torch.nn.functional.interpolate(self.inner,(1024,1024),mode='bilinear',align_corners=False)
|
||||
|
||||
self.image_paths = input['image_path']
|
||||
|
||||
if self.isTrain:
|
||||
self.gtfake = input['data_gtfake'].to(self.device)
|
||||
self.gtfake = torch.nn.functional.interpolate(self.gtfake, (1024, 1024), mode='bilinear', align_corners=False)
|
||||
self.real_B = self.gtfake
|
||||
|
||||
self.real_A = torch.cat((self.outer, self.inner), 1)
|
||||
|
||||
def set_input(self, outer, inner):
|
||||
inner = torch.from_numpy(inner).unsqueeze(0).unsqueeze(0)
|
||||
outer = torch.from_numpy(outer).unsqueeze(0).unsqueeze(0)
|
||||
|
||||
inner = (inner - torch.min(inner))/(torch.max(inner)-torch.min(inner))
|
||||
outer = (outer - torch.min(outer))/(torch.max(outer)-torch.min(outer))
|
||||
|
||||
inner = self.normalize(inner)
|
||||
outer = self.normalize(outer)
|
||||
|
||||
self.real_A = torch.cat((outer, inner), 1).to(self.device)
|
||||
|
||||
|
||||
def normalize(self, input):
|
||||
input = input * 2
|
||||
input = input - 1
|
||||
return input
|
||||
|
||||
def forward(self):
|
||||
"""Run forward pass; called by both functions <optimize_parameters> and <test>."""
|
||||
self.fake_B = self.netG(self.real_A) # G(A)
|
||||
|
||||
def backward_D(self):
|
||||
"""Calculate GAN loss for the discriminator"""
|
||||
# Fake; stop backprop to the generator by detaching fake_B
|
||||
fake_AB = torch.cat((self.real_A, self.fake_B), 1) # we use conditional GANs; we need to feed both input and output to the discriminator
|
||||
pred_fake = self.netD(fake_AB.detach())
|
||||
self.loss_D_fake = self.criterionGAN(pred_fake, False)
|
||||
# Real
|
||||
real_AB = torch.cat((self.real_A, self.real_B), 1)
|
||||
pred_real = self.netD(real_AB)
|
||||
self.loss_D_real = self.criterionGAN(pred_real, True)
|
||||
# combine loss and calculate gradients
|
||||
self.loss_D = (self.loss_D_fake + self.loss_D_real) * 0.5
|
||||
self.loss_D.backward()
|
||||
|
||||
def backward_G(self):
|
||||
"""Calculate GAN and L1 loss for the generator"""
|
||||
# First, G(A) should fake the discriminator
|
||||
fake_AB = torch.cat((self.real_A, self.fake_B), 1)
|
||||
pred_fake = self.netD(fake_AB)
|
||||
self.loss_G_GAN = self.criterionGAN(pred_fake, True)
|
||||
# Second, G(A) = B
|
||||
self.loss_G_L1 = self.criterionL1(self.fake_B, self.real_B) * self.opt.lambda_L1
|
||||
# combine loss and calculate gradients
|
||||
self.loss_G = self.loss_G_L1 + self.loss_G_GAN
|
||||
self.loss_G.backward()
|
||||
|
||||
def optimize_parameters(self):
|
||||
self.forward() # compute fake images: G(A)
|
||||
# update D
|
||||
self.set_requires_grad(self.netD, True) # enable backprop for D
|
||||
self.optimizer_D.zero_grad() # set D's gradients to zero
|
||||
self.backward_D() # calculate gradients for D
|
||||
self.optimizer_D.step() # update D's weights
|
||||
# update G
|
||||
self.set_requires_grad(self.netD, False) # D requires no gradients when optimizing G
|
||||
self.optimizer_G.zero_grad() # set G's gradients to zero
|
||||
self.backward_G() # calculate graidents for G
|
||||
self.optimizer_G.step() # udpate G's weights
|
||||
@@ -0,0 +1 @@
|
||||
"""This package options includes option modules: training options, test options, and basic options (used in both training and test)."""
|
||||
@@ -0,0 +1,156 @@
|
||||
import argparse
|
||||
import os
|
||||
from ...pix2pix.util import util
|
||||
# import torch
|
||||
from ...pix2pix import models
|
||||
# import pix2pix.data
|
||||
import numpy as np
|
||||
|
||||
class BaseOptions():
|
||||
"""This class defines options used during both training and test time.
|
||||
|
||||
It also implements several helper functions such as parsing, printing, and saving the options.
|
||||
It also gathers additional options defined in <modify_commandline_options> functions in both dataset class and model class.
|
||||
"""
|
||||
|
||||
def __init__(self):
|
||||
"""Reset the class; indicates the class hasn't been initailized"""
|
||||
self.initialized = False
|
||||
|
||||
def initialize(self, parser):
|
||||
"""Define the common options that are used in both training and test."""
|
||||
# basic parameters
|
||||
parser.add_argument('--dataroot', help='path to images (should have subfolders trainA, trainB, valA, valB, etc)')
|
||||
parser.add_argument('--name', type=str, default='void', help='mahdi_unet_new, scaled_unet')
|
||||
parser.add_argument('--gpu_ids', type=str, default='0', help='gpu ids: e.g. 0 0,1,2, 0,2. use -1 for CPU')
|
||||
parser.add_argument('--checkpoints_dir', type=str, default='./pix2pix/checkpoints', help='models are saved here')
|
||||
# model parameters
|
||||
parser.add_argument('--model', type=str, default='cycle_gan', help='chooses which model to use. [cycle_gan | pix2pix | test | colorization]')
|
||||
parser.add_argument('--input_nc', type=int, default=2, help='# of input image channels: 3 for RGB and 1 for grayscale')
|
||||
parser.add_argument('--output_nc', type=int, default=1, help='# of output image channels: 3 for RGB and 1 for grayscale')
|
||||
parser.add_argument('--ngf', type=int, default=64, help='# of gen filters in the last conv layer')
|
||||
parser.add_argument('--ndf', type=int, default=64, help='# of discrim filters in the first conv layer')
|
||||
parser.add_argument('--netD', type=str, default='basic', help='specify discriminator architecture [basic | n_layers | pixel]. The basic model is a 70x70 PatchGAN. n_layers allows you to specify the layers in the discriminator')
|
||||
parser.add_argument('--netG', type=str, default='resnet_9blocks', help='specify generator architecture [resnet_9blocks | resnet_6blocks | unet_256 | unet_128]')
|
||||
parser.add_argument('--n_layers_D', type=int, default=3, help='only used if netD==n_layers')
|
||||
parser.add_argument('--norm', type=str, default='instance', help='instance normalization or batch normalization [instance | batch | none]')
|
||||
parser.add_argument('--init_type', type=str, default='normal', help='network initialization [normal | xavier | kaiming | orthogonal]')
|
||||
parser.add_argument('--init_gain', type=float, default=0.02, help='scaling factor for normal, xavier and orthogonal.')
|
||||
parser.add_argument('--no_dropout', action='store_true', help='no dropout for the generator')
|
||||
# dataset parameters
|
||||
parser.add_argument('--dataset_mode', type=str, default='unaligned', help='chooses how datasets are loaded. [unaligned | aligned | single | colorization]')
|
||||
parser.add_argument('--direction', type=str, default='AtoB', help='AtoB or BtoA')
|
||||
parser.add_argument('--serial_batches', action='store_true', help='if true, takes images in order to make batches, otherwise takes them randomly')
|
||||
parser.add_argument('--num_threads', default=4, type=int, help='# threads for loading data')
|
||||
parser.add_argument('--batch_size', type=int, default=1, help='input batch size')
|
||||
parser.add_argument('--load_size', type=int, default=672, help='scale images to this size')
|
||||
parser.add_argument('--crop_size', type=int, default=672, help='then crop to this size')
|
||||
parser.add_argument('--max_dataset_size', type=int, default=10000, help='Maximum number of samples allowed per dataset. If the dataset directory contains more than max_dataset_size, only a subset is loaded.')
|
||||
parser.add_argument('--preprocess', type=str, default='resize_and_crop', help='scaling and cropping of images at load time [resize_and_crop | crop | scale_width | scale_width_and_crop | none]')
|
||||
parser.add_argument('--no_flip', action='store_true', help='if specified, do not flip the images for data augmentation')
|
||||
parser.add_argument('--display_winsize', type=int, default=256, help='display window size for both visdom and HTML')
|
||||
# additional parameters
|
||||
parser.add_argument('--epoch', type=str, default='latest', help='which epoch to load? set to latest to use latest cached model')
|
||||
parser.add_argument('--load_iter', type=int, default='0', help='which iteration to load? if load_iter > 0, the code will load models by iter_[load_iter]; otherwise, the code will load models by [epoch]')
|
||||
parser.add_argument('--verbose', action='store_true', help='if specified, print more debugging information')
|
||||
parser.add_argument('--suffix', default='', type=str, help='customized suffix: opt.name = opt.name + suffix: e.g., {model}_{netG}_size{load_size}')
|
||||
|
||||
parser.add_argument('--data_dir', type=str, required=False,
|
||||
help='input files directory images can be .png .jpg .tiff')
|
||||
parser.add_argument('--output_dir', type=str, required=False,
|
||||
help='result dir. result depth will be png. vides are JMPG as avi')
|
||||
parser.add_argument('--savecrops', type=int, required=False)
|
||||
parser.add_argument('--savewholeest', type=int, required=False)
|
||||
parser.add_argument('--output_resolution', type=int, required=False,
|
||||
help='0 for no restriction 1 for resize to input size')
|
||||
parser.add_argument('--net_receptive_field_size', type=int, required=False)
|
||||
parser.add_argument('--pix2pixsize', type=int, required=False)
|
||||
parser.add_argument('--generatevideo', type=int, required=False)
|
||||
parser.add_argument('--depthNet', type=int, required=False, help='0: midas 1:strurturedRL')
|
||||
parser.add_argument('--R0', action='store_true')
|
||||
parser.add_argument('--R20', action='store_true')
|
||||
parser.add_argument('--Final', action='store_true')
|
||||
parser.add_argument('--colorize_results', action='store_true')
|
||||
parser.add_argument('--max_res', type=float, default=np.inf)
|
||||
|
||||
self.initialized = True
|
||||
return parser
|
||||
|
||||
def gather_options(self):
|
||||
"""Initialize our parser with basic options(only once).
|
||||
Add additional model-specific and dataset-specific options.
|
||||
These options are defined in the <modify_commandline_options> function
|
||||
in model and dataset classes.
|
||||
"""
|
||||
if not self.initialized: # check if it has been initialized
|
||||
parser = argparse.ArgumentParser(formatter_class=argparse.ArgumentDefaultsHelpFormatter)
|
||||
parser = self.initialize(parser)
|
||||
|
||||
# get the basic options
|
||||
opt, _ = parser.parse_known_args()
|
||||
|
||||
# modify model-related parser options
|
||||
model_name = opt.model
|
||||
model_option_setter = models.get_option_setter(model_name)
|
||||
parser = model_option_setter(parser, self.isTrain)
|
||||
opt, _ = parser.parse_known_args() # parse again with new defaults
|
||||
|
||||
# modify dataset-related parser options
|
||||
# dataset_name = opt.dataset_mode
|
||||
# dataset_option_setter = pix2pix.data.get_option_setter(dataset_name)
|
||||
# parser = dataset_option_setter(parser, self.isTrain)
|
||||
|
||||
# save and return the parser
|
||||
self.parser = parser
|
||||
#return parser.parse_args() #EVIL
|
||||
return opt
|
||||
|
||||
def print_options(self, opt):
|
||||
"""Print and save options
|
||||
|
||||
It will print both current options and default values(if different).
|
||||
It will save options into a text file / [checkpoints_dir] / opt.txt
|
||||
"""
|
||||
message = ''
|
||||
message += '----------------- Options ---------------\n'
|
||||
for k, v in sorted(vars(opt).items()):
|
||||
comment = ''
|
||||
default = self.parser.get_default(k)
|
||||
if v != default:
|
||||
comment = '\t[default: %s]' % str(default)
|
||||
message += '{:>25}: {:<30}{}\n'.format(str(k), str(v), comment)
|
||||
message += '----------------- End -------------------'
|
||||
print(message)
|
||||
|
||||
# save to the disk
|
||||
expr_dir = os.path.join(opt.checkpoints_dir, opt.name)
|
||||
util.mkdirs(expr_dir)
|
||||
file_name = os.path.join(expr_dir, '{}_opt.txt'.format(opt.phase))
|
||||
with open(file_name, 'wt') as opt_file:
|
||||
opt_file.write(message)
|
||||
opt_file.write('\n')
|
||||
|
||||
def parse(self):
|
||||
"""Parse our options, create checkpoints directory suffix, and set up gpu device."""
|
||||
opt = self.gather_options()
|
||||
opt.isTrain = self.isTrain # train or test
|
||||
|
||||
# process opt.suffix
|
||||
if opt.suffix:
|
||||
suffix = ('_' + opt.suffix.format(**vars(opt))) if opt.suffix != '' else ''
|
||||
opt.name = opt.name + suffix
|
||||
|
||||
#self.print_options(opt)
|
||||
|
||||
# set gpu ids
|
||||
str_ids = opt.gpu_ids.split(',')
|
||||
opt.gpu_ids = []
|
||||
for str_id in str_ids:
|
||||
id = int(str_id)
|
||||
if id >= 0:
|
||||
opt.gpu_ids.append(id)
|
||||
#if len(opt.gpu_ids) > 0:
|
||||
# torch.cuda.set_device(opt.gpu_ids[0])
|
||||
|
||||
self.opt = opt
|
||||
return self.opt
|
||||
@@ -0,0 +1,22 @@
|
||||
from .base_options import BaseOptions
|
||||
|
||||
|
||||
class TestOptions(BaseOptions):
|
||||
"""This class includes test options.
|
||||
|
||||
It also includes shared options defined in BaseOptions.
|
||||
"""
|
||||
|
||||
def initialize(self, parser):
|
||||
parser = BaseOptions.initialize(self, parser) # define shared options
|
||||
parser.add_argument('--aspect_ratio', type=float, default=1.0, help='aspect ratio of result images')
|
||||
parser.add_argument('--phase', type=str, default='test', help='train, val, test, etc')
|
||||
# Dropout and Batchnorm has different behavioir during training and test.
|
||||
parser.add_argument('--eval', action='store_true', help='use eval mode during test time.')
|
||||
parser.add_argument('--num_test', type=int, default=50, help='how many test images to run')
|
||||
# rewrite devalue values
|
||||
parser.set_defaults(model='pix2pix4depth')
|
||||
# To avoid cropping, the load_size should be the same as crop_size
|
||||
parser.set_defaults(load_size=parser.get_default('crop_size'))
|
||||
self.isTrain = False
|
||||
return parser
|
||||
@@ -0,0 +1 @@
|
||||
"""This package includes a miscellaneous collection of useful helper functions."""
|
||||
@@ -0,0 +1,110 @@
|
||||
from __future__ import print_function
|
||||
import os
|
||||
import tarfile
|
||||
import requests
|
||||
from warnings import warn
|
||||
from zipfile import ZipFile
|
||||
from bs4 import BeautifulSoup
|
||||
from os.path import abspath, isdir, join, basename
|
||||
|
||||
|
||||
class GetData(object):
|
||||
"""A Python script for downloading CycleGAN or pix2pix datasets.
|
||||
|
||||
Parameters:
|
||||
technique (str) -- One of: 'cyclegan' or 'pix2pix'.
|
||||
verbose (bool) -- If True, print additional information.
|
||||
|
||||
Examples:
|
||||
>>> from util.get_data import GetData
|
||||
>>> gd = GetData(technique='cyclegan')
|
||||
>>> new_data_path = gd.get(save_path='./datasets') # options will be displayed.
|
||||
|
||||
Alternatively, You can use bash scripts: 'scripts/download_pix2pix_model.sh'
|
||||
and 'scripts/download_cyclegan_model.sh'.
|
||||
"""
|
||||
|
||||
def __init__(self, technique='cyclegan', verbose=True):
|
||||
url_dict = {
|
||||
'pix2pix': 'http://efrosgans.eecs.berkeley.edu/pix2pix/datasets/',
|
||||
'cyclegan': 'https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets'
|
||||
}
|
||||
self.url = url_dict.get(technique.lower())
|
||||
self._verbose = verbose
|
||||
|
||||
def _print(self, text):
|
||||
if self._verbose:
|
||||
print(text)
|
||||
|
||||
@staticmethod
|
||||
def _get_options(r):
|
||||
soup = BeautifulSoup(r.text, 'lxml')
|
||||
options = [h.text for h in soup.find_all('a', href=True)
|
||||
if h.text.endswith(('.zip', 'tar.gz'))]
|
||||
return options
|
||||
|
||||
def _present_options(self):
|
||||
r = requests.get(self.url)
|
||||
options = self._get_options(r)
|
||||
print('Options:\n')
|
||||
for i, o in enumerate(options):
|
||||
print("{0}: {1}".format(i, o))
|
||||
choice = input("\nPlease enter the number of the "
|
||||
"dataset above you wish to download:")
|
||||
return options[int(choice)]
|
||||
|
||||
def _download_data(self, dataset_url, save_path):
|
||||
if not isdir(save_path):
|
||||
os.makedirs(save_path)
|
||||
|
||||
base = basename(dataset_url)
|
||||
temp_save_path = join(save_path, base)
|
||||
|
||||
with open(temp_save_path, "wb") as f:
|
||||
r = requests.get(dataset_url)
|
||||
f.write(r.content)
|
||||
|
||||
if base.endswith('.tar.gz'):
|
||||
obj = tarfile.open(temp_save_path)
|
||||
elif base.endswith('.zip'):
|
||||
obj = ZipFile(temp_save_path, 'r')
|
||||
else:
|
||||
raise ValueError("Unknown File Type: {0}.".format(base))
|
||||
|
||||
self._print("Unpacking Data...")
|
||||
obj.extractall(save_path)
|
||||
obj.close()
|
||||
os.remove(temp_save_path)
|
||||
|
||||
def get(self, save_path, dataset=None):
|
||||
"""
|
||||
|
||||
Download a dataset.
|
||||
|
||||
Parameters:
|
||||
save_path (str) -- A directory to save the data to.
|
||||
dataset (str) -- (optional). A specific dataset to download.
|
||||
Note: this must include the file extension.
|
||||
If None, options will be presented for you
|
||||
to choose from.
|
||||
|
||||
Returns:
|
||||
save_path_full (str) -- the absolute path to the downloaded data.
|
||||
|
||||
"""
|
||||
if dataset is None:
|
||||
selected_dataset = self._present_options()
|
||||
else:
|
||||
selected_dataset = dataset
|
||||
|
||||
save_path_full = join(save_path, selected_dataset.split('.')[0])
|
||||
|
||||
if isdir(save_path_full):
|
||||
warn("\n'{0}' already exists. Voiding Download.".format(
|
||||
save_path_full))
|
||||
else:
|
||||
self._print('Downloading Data...')
|
||||
url = "{0}/{1}".format(self.url, selected_dataset)
|
||||
self._download_data(url, save_path=save_path)
|
||||
|
||||
return abspath(save_path_full)
|
||||
@@ -0,0 +1,47 @@
|
||||
import numpy as np
|
||||
|
||||
class GuidedFilter():
|
||||
def __init__(self, source, reference, r=64, eps= 0.05**2):
|
||||
self.source = source;
|
||||
self.reference = reference;
|
||||
self.r = r
|
||||
self.eps = eps
|
||||
|
||||
self.smooth = self.guidedfilter(self.source,self.reference,self.r,self.eps)
|
||||
|
||||
def boxfilter(self,img, r):
|
||||
(rows, cols) = img.shape
|
||||
imDst = np.zeros_like(img)
|
||||
|
||||
imCum = np.cumsum(img, 0)
|
||||
imDst[0 : r+1, :] = imCum[r : 2*r+1, :]
|
||||
imDst[r+1 : rows-r, :] = imCum[2*r+1 : rows, :] - imCum[0 : rows-2*r-1, :]
|
||||
imDst[rows-r: rows, :] = np.tile(imCum[rows-1, :], [r, 1]) - imCum[rows-2*r-1 : rows-r-1, :]
|
||||
|
||||
imCum = np.cumsum(imDst, 1)
|
||||
imDst[:, 0 : r+1] = imCum[:, r : 2*r+1]
|
||||
imDst[:, r+1 : cols-r] = imCum[:, 2*r+1 : cols] - imCum[:, 0 : cols-2*r-1]
|
||||
imDst[:, cols-r: cols] = np.tile(imCum[:, cols-1], [r, 1]).T - imCum[:, cols-2*r-1 : cols-r-1]
|
||||
|
||||
return imDst
|
||||
|
||||
def guidedfilter(self,I, p, r, eps):
|
||||
(rows, cols) = I.shape
|
||||
N = self.boxfilter(np.ones([rows, cols]), r)
|
||||
|
||||
meanI = self.boxfilter(I, r) / N
|
||||
meanP = self.boxfilter(p, r) / N
|
||||
meanIp = self.boxfilter(I * p, r) / N
|
||||
covIp = meanIp - meanI * meanP
|
||||
|
||||
meanII = self.boxfilter(I * I, r) / N
|
||||
varI = meanII - meanI * meanI
|
||||
|
||||
a = covIp / (varI + eps)
|
||||
b = meanP - a * meanI
|
||||
|
||||
meanA = self.boxfilter(a, r) / N
|
||||
meanB = self.boxfilter(b, r) / N
|
||||
|
||||
q = meanA * I + meanB
|
||||
return q
|
||||
@@ -0,0 +1,86 @@
|
||||
import dominate
|
||||
from dominate.tags import meta, h3, table, tr, td, p, a, img, br
|
||||
import os
|
||||
|
||||
|
||||
class HTML:
|
||||
"""This HTML class allows us to save images and write texts into a single HTML file.
|
||||
|
||||
It consists of functions such as <add_header> (add a text header to the HTML file),
|
||||
<add_images> (add a row of images to the HTML file), and <save> (save the HTML to the disk).
|
||||
It is based on Python library 'dominate', a Python library for creating and manipulating HTML documents using a DOM API.
|
||||
"""
|
||||
|
||||
def __init__(self, web_dir, title, refresh=0):
|
||||
"""Initialize the HTML classes
|
||||
|
||||
Parameters:
|
||||
web_dir (str) -- a directory that stores the webpage. HTML file will be created at <web_dir>/index.html; images will be saved at <web_dir/images/
|
||||
title (str) -- the webpage name
|
||||
refresh (int) -- how often the website refresh itself; if 0; no refreshing
|
||||
"""
|
||||
self.title = title
|
||||
self.web_dir = web_dir
|
||||
self.img_dir = os.path.join(self.web_dir, 'images')
|
||||
if not os.path.exists(self.web_dir):
|
||||
os.makedirs(self.web_dir)
|
||||
if not os.path.exists(self.img_dir):
|
||||
os.makedirs(self.img_dir)
|
||||
|
||||
self.doc = dominate.document(title=title)
|
||||
if refresh > 0:
|
||||
with self.doc.head:
|
||||
meta(http_equiv="refresh", content=str(refresh))
|
||||
|
||||
def get_image_dir(self):
|
||||
"""Return the directory that stores images"""
|
||||
return self.img_dir
|
||||
|
||||
def add_header(self, text):
|
||||
"""Insert a header to the HTML file
|
||||
|
||||
Parameters:
|
||||
text (str) -- the header text
|
||||
"""
|
||||
with self.doc:
|
||||
h3(text)
|
||||
|
||||
def add_images(self, ims, txts, links, width=400):
|
||||
"""add images to the HTML file
|
||||
|
||||
Parameters:
|
||||
ims (str list) -- a list of image paths
|
||||
txts (str list) -- a list of image names shown on the website
|
||||
links (str list) -- a list of hyperref links; when you click an image, it will redirect you to a new page
|
||||
"""
|
||||
self.t = table(border=1, style="table-layout: fixed;") # Insert a table
|
||||
self.doc.add(self.t)
|
||||
with self.t:
|
||||
with tr():
|
||||
for im, txt, link in zip(ims, txts, links):
|
||||
with td(style="word-wrap: break-word;", halign="center", valign="top"):
|
||||
with p():
|
||||
with a(href=os.path.join('images', link)):
|
||||
img(style="width:%dpx" % width, src=os.path.join('images', im))
|
||||
br()
|
||||
p(txt)
|
||||
|
||||
def save(self):
|
||||
"""save the current content to the HMTL file"""
|
||||
html_file = '%s/index.html' % self.web_dir
|
||||
f = open(html_file, 'wt')
|
||||
f.write(self.doc.render())
|
||||
f.close()
|
||||
|
||||
|
||||
if __name__ == '__main__': # we show an example usage here.
|
||||
html = HTML('web/', 'test_html')
|
||||
html.add_header('hello world')
|
||||
|
||||
ims, txts, links = [], [], []
|
||||
for n in range(4):
|
||||
ims.append('image_%d.png' % n)
|
||||
txts.append('text_%d' % n)
|
||||
links.append('image_%d.png' % n)
|
||||
html.add_images(ims, txts, links)
|
||||
html.save()
|
||||
@@ -0,0 +1,54 @@
|
||||
import random
|
||||
import torch
|
||||
|
||||
|
||||
class ImagePool():
|
||||
"""This class implements an image buffer that stores previously generated images.
|
||||
|
||||
This buffer enables us to update discriminators using a history of generated images
|
||||
rather than the ones produced by the latest generators.
|
||||
"""
|
||||
|
||||
def __init__(self, pool_size):
|
||||
"""Initialize the ImagePool class
|
||||
|
||||
Parameters:
|
||||
pool_size (int) -- the size of image buffer, if pool_size=0, no buffer will be created
|
||||
"""
|
||||
self.pool_size = pool_size
|
||||
if self.pool_size > 0: # create an empty pool
|
||||
self.num_imgs = 0
|
||||
self.images = []
|
||||
|
||||
def query(self, images):
|
||||
"""Return an image from the pool.
|
||||
|
||||
Parameters:
|
||||
images: the latest generated images from the generator
|
||||
|
||||
Returns images from the buffer.
|
||||
|
||||
By 50/100, the buffer will return input images.
|
||||
By 50/100, the buffer will return images previously stored in the buffer,
|
||||
and insert the current images to the buffer.
|
||||
"""
|
||||
if self.pool_size == 0: # if the buffer size is 0, do nothing
|
||||
return images
|
||||
return_images = []
|
||||
for image in images:
|
||||
image = torch.unsqueeze(image.data, 0)
|
||||
if self.num_imgs < self.pool_size: # if the buffer is not full; keep inserting current images to the buffer
|
||||
self.num_imgs = self.num_imgs + 1
|
||||
self.images.append(image)
|
||||
return_images.append(image)
|
||||
else:
|
||||
p = random.uniform(0, 1)
|
||||
if p > 0.5: # by 50% chance, the buffer will return a previously stored image, and insert the current image into the buffer
|
||||
random_id = random.randint(0, self.pool_size - 1) # randint is inclusive
|
||||
tmp = self.images[random_id].clone()
|
||||
self.images[random_id] = image
|
||||
return_images.append(tmp)
|
||||
else: # by another 50% chance, the buffer will return the current image
|
||||
return_images.append(image)
|
||||
return_images = torch.cat(return_images, 0) # collect all the images and return
|
||||
return return_images
|
||||
@@ -0,0 +1,105 @@
|
||||
"""This module contains simple helper functions """
|
||||
from __future__ import print_function
|
||||
import torch
|
||||
import numpy as np
|
||||
from PIL import Image
|
||||
import os
|
||||
|
||||
|
||||
def tensor2im(input_image, imtype=np.uint16):
|
||||
""""Converts a Tensor array into a numpy image array.
|
||||
|
||||
Parameters:
|
||||
input_image (tensor) -- the input image tensor array
|
||||
imtype (type) -- the desired type of the converted numpy array
|
||||
"""
|
||||
if not isinstance(input_image, np.ndarray):
|
||||
if isinstance(input_image, torch.Tensor): # get the data from a variable
|
||||
image_tensor = input_image.data
|
||||
else:
|
||||
return input_image
|
||||
image_numpy = torch.squeeze(image_tensor).cpu().numpy() # convert it into a numpy array
|
||||
image_numpy = (image_numpy + 1) / 2.0 * (2**16-1) #
|
||||
else: # if it is a numpy array, do nothing
|
||||
image_numpy = input_image
|
||||
return image_numpy.astype(imtype)
|
||||
|
||||
|
||||
def diagnose_network(net, name='network'):
|
||||
"""Calculate and print the mean of average absolute(gradients)
|
||||
|
||||
Parameters:
|
||||
net (torch network) -- Torch network
|
||||
name (str) -- the name of the network
|
||||
"""
|
||||
mean = 0.0
|
||||
count = 0
|
||||
for param in net.parameters():
|
||||
if param.grad is not None:
|
||||
mean += torch.mean(torch.abs(param.grad.data))
|
||||
count += 1
|
||||
if count > 0:
|
||||
mean = mean / count
|
||||
print(name)
|
||||
print(mean)
|
||||
|
||||
|
||||
def save_image(image_numpy, image_path, aspect_ratio=1.0):
|
||||
"""Save a numpy image to the disk
|
||||
|
||||
Parameters:
|
||||
image_numpy (numpy array) -- input numpy array
|
||||
image_path (str) -- the path of the image
|
||||
"""
|
||||
image_pil = Image.fromarray(image_numpy)
|
||||
|
||||
image_pil = image_pil.convert('I;16')
|
||||
|
||||
# image_pil = Image.fromarray(image_numpy)
|
||||
# h, w, _ = image_numpy.shape
|
||||
#
|
||||
# if aspect_ratio > 1.0:
|
||||
# image_pil = image_pil.resize((h, int(w * aspect_ratio)), Image.BICUBIC)
|
||||
# if aspect_ratio < 1.0:
|
||||
# image_pil = image_pil.resize((int(h / aspect_ratio), w), Image.BICUBIC)
|
||||
|
||||
image_pil.save(image_path)
|
||||
|
||||
|
||||
def print_numpy(x, val=True, shp=False):
|
||||
"""Print the mean, min, max, median, std, and size of a numpy array
|
||||
|
||||
Parameters:
|
||||
val (bool) -- if print the values of the numpy array
|
||||
shp (bool) -- if print the shape of the numpy array
|
||||
"""
|
||||
x = x.astype(np.float64)
|
||||
if shp:
|
||||
print('shape,', x.shape)
|
||||
if val:
|
||||
x = x.flatten()
|
||||
print('mean = %3.3f, min = %3.3f, max = %3.3f, median = %3.3f, std=%3.3f' % (
|
||||
np.mean(x), np.min(x), np.max(x), np.median(x), np.std(x)))
|
||||
|
||||
|
||||
def mkdirs(paths):
|
||||
"""create empty directories if they don't exist
|
||||
|
||||
Parameters:
|
||||
paths (str list) -- a list of directory paths
|
||||
"""
|
||||
if isinstance(paths, list) and not isinstance(paths, str):
|
||||
for path in paths:
|
||||
mkdir(path)
|
||||
else:
|
||||
mkdir(paths)
|
||||
|
||||
|
||||
def mkdir(path):
|
||||
"""create a single empty directory if it didn't exist
|
||||
|
||||
Parameters:
|
||||
path (str) -- a single directory path
|
||||
"""
|
||||
if not os.path.exists(path):
|
||||
os.makedirs(path)
|
||||
@@ -0,0 +1,166 @@
|
||||
import numpy as np
|
||||
import os
|
||||
import sys
|
||||
import ntpath
|
||||
import time
|
||||
from . import util, html
|
||||
from subprocess import Popen, PIPE
|
||||
import torch
|
||||
|
||||
|
||||
if sys.version_info[0] == 2:
|
||||
VisdomExceptionBase = Exception
|
||||
else:
|
||||
VisdomExceptionBase = ConnectionError
|
||||
|
||||
|
||||
def save_images(webpage, visuals, image_path, aspect_ratio=1.0, width=256):
|
||||
"""Save images to the disk.
|
||||
|
||||
Parameters:
|
||||
webpage (the HTML class) -- the HTML webpage class that stores these imaegs (see html.py for more details)
|
||||
visuals (OrderedDict) -- an ordered dictionary that stores (name, images (either tensor or numpy) ) pairs
|
||||
image_path (str) -- the string is used to create image paths
|
||||
aspect_ratio (float) -- the aspect ratio of saved images
|
||||
width (int) -- the images will be resized to width x width
|
||||
|
||||
This function will save images stored in 'visuals' to the HTML file specified by 'webpage'.
|
||||
"""
|
||||
image_dir = webpage.get_image_dir()
|
||||
short_path = ntpath.basename(image_path[0])
|
||||
name = os.path.splitext(short_path)[0]
|
||||
|
||||
webpage.add_header(name)
|
||||
ims, txts, links = [], [], []
|
||||
|
||||
for label, im_data in visuals.items():
|
||||
im = util.tensor2im(im_data)
|
||||
image_name = '%s_%s.png' % (name, label)
|
||||
save_path = os.path.join(image_dir, image_name)
|
||||
util.save_image(im, save_path, aspect_ratio=aspect_ratio)
|
||||
ims.append(image_name)
|
||||
txts.append(label)
|
||||
links.append(image_name)
|
||||
webpage.add_images(ims, txts, links, width=width)
|
||||
|
||||
|
||||
class Visualizer():
|
||||
"""This class includes several functions that can display/save images and print/save logging information.
|
||||
|
||||
It uses a Python library 'visdom' for display, and a Python library 'dominate' (wrapped in 'HTML') for creating HTML files with images.
|
||||
"""
|
||||
|
||||
def __init__(self, opt):
|
||||
"""Initialize the Visualizer class
|
||||
|
||||
Parameters:
|
||||
opt -- stores all the experiment flags; needs to be a subclass of BaseOptions
|
||||
Step 1: Cache the training/test options
|
||||
Step 2: connect to a visdom server
|
||||
Step 3: create an HTML object for saveing HTML filters
|
||||
Step 4: create a logging file to store training losses
|
||||
"""
|
||||
self.opt = opt # cache the option
|
||||
self.display_id = opt.display_id
|
||||
self.use_html = opt.isTrain and not opt.no_html
|
||||
self.win_size = opt.display_winsize
|
||||
self.name = opt.name
|
||||
self.port = opt.display_port
|
||||
self.saved = False
|
||||
|
||||
if self.use_html: # create an HTML object at <checkpoints_dir>/web/; images will be saved under <checkpoints_dir>/web/images/
|
||||
self.web_dir = os.path.join(opt.checkpoints_dir, opt.name, 'web')
|
||||
self.img_dir = os.path.join(self.web_dir, 'images')
|
||||
print('create web directory %s...' % self.web_dir)
|
||||
util.mkdirs([self.web_dir, self.img_dir])
|
||||
# create a logging file to store training losses
|
||||
self.log_name = os.path.join(opt.checkpoints_dir, opt.name, 'loss_log.txt')
|
||||
with open(self.log_name, "a") as log_file:
|
||||
now = time.strftime("%c")
|
||||
log_file.write('================ Training Loss (%s) ================\n' % now)
|
||||
|
||||
def reset(self):
|
||||
"""Reset the self.saved status"""
|
||||
self.saved = False
|
||||
|
||||
def create_visdom_connections(self):
|
||||
"""If the program could not connect to Visdom server, this function will start a new server at port < self.port > """
|
||||
cmd = sys.executable + ' -m visdom.server -p %d &>/dev/null &' % self.port
|
||||
print('\n\nCould not connect to Visdom server. \n Trying to start a server....')
|
||||
print('Command: %s' % cmd)
|
||||
Popen(cmd, shell=True, stdout=PIPE, stderr=PIPE)
|
||||
|
||||
def display_current_results(self, visuals, epoch, save_result):
|
||||
"""Display current results on visdom; save current results to an HTML file.
|
||||
|
||||
Parameters:
|
||||
visuals (OrderedDict) - - dictionary of images to display or save
|
||||
epoch (int) - - the current epoch
|
||||
save_result (bool) - - if save the current results to an HTML file
|
||||
"""
|
||||
if self.use_html and (save_result or not self.saved): # save images to an HTML file if they haven't been saved.
|
||||
self.saved = True
|
||||
# save images to the disk
|
||||
for label, image in visuals.items():
|
||||
image_numpy = util.tensor2im(image)
|
||||
img_path = os.path.join(self.img_dir, 'epoch%.3d_%s.png' % (epoch, label))
|
||||
util.save_image(image_numpy, img_path)
|
||||
|
||||
# update website
|
||||
webpage = html.HTML(self.web_dir, 'Experiment name = %s' % self.name, refresh=1)
|
||||
for n in range(epoch, 0, -1):
|
||||
webpage.add_header('epoch [%d]' % n)
|
||||
ims, txts, links = [], [], []
|
||||
|
||||
for label, image_numpy in visuals.items():
|
||||
# image_numpy = util.tensor2im(image)
|
||||
img_path = 'epoch%.3d_%s.png' % (n, label)
|
||||
ims.append(img_path)
|
||||
txts.append(label)
|
||||
links.append(img_path)
|
||||
webpage.add_images(ims, txts, links, width=self.win_size)
|
||||
webpage.save()
|
||||
|
||||
# def plot_current_losses(self, epoch, counter_ratio, losses):
|
||||
# """display the current losses on visdom display: dictionary of error labels and values
|
||||
#
|
||||
# Parameters:
|
||||
# epoch (int) -- current epoch
|
||||
# counter_ratio (float) -- progress (percentage) in the current epoch, between 0 to 1
|
||||
# losses (OrderedDict) -- training losses stored in the format of (name, float) pairs
|
||||
# """
|
||||
# if not hasattr(self, 'plot_data'):
|
||||
# self.plot_data = {'X': [], 'Y': [], 'legend': list(losses.keys())}
|
||||
# self.plot_data['X'].append(epoch + counter_ratio)
|
||||
# self.plot_data['Y'].append([losses[k] for k in self.plot_data['legend']])
|
||||
# try:
|
||||
# self.vis.line(
|
||||
# X=np.stack([np.array(self.plot_data['X'])] * len(self.plot_data['legend']), 1),
|
||||
# Y=np.array(self.plot_data['Y']),
|
||||
# opts={
|
||||
# 'title': self.name + ' loss over time',
|
||||
# 'legend': self.plot_data['legend'],
|
||||
# 'xlabel': 'epoch',
|
||||
# 'ylabel': 'loss'},
|
||||
# win=self.display_id)
|
||||
# except VisdomExceptionBase:
|
||||
# self.create_visdom_connections()
|
||||
|
||||
# losses: same format as |losses| of plot_current_losses
|
||||
def print_current_losses(self, epoch, iters, losses, t_comp, t_data):
|
||||
"""print current losses on console; also save the losses to the disk
|
||||
|
||||
Parameters:
|
||||
epoch (int) -- current epoch
|
||||
iters (int) -- current training iteration during this epoch (reset to 0 at the end of every epoch)
|
||||
losses (OrderedDict) -- training losses stored in the format of (name, float) pairs
|
||||
t_comp (float) -- computational time per data point (normalized by batch_size)
|
||||
t_data (float) -- data loading time per data point (normalized by batch_size)
|
||||
"""
|
||||
message = '(epoch: %d, iters: %d, time: %.3f, data: %.3f) ' % (epoch, iters, t_comp, t_data)
|
||||
for k, v in losses.items():
|
||||
message += '%s: %.3f ' % (k, v)
|
||||
|
||||
print(message) # print the message
|
||||
with open(self.log_name, "a") as log_file:
|
||||
log_file.write('%s\n' % message) # save the message
|
||||
@@ -0,0 +1,21 @@
|
||||
MIT License
|
||||
|
||||
Copyright (c) 2022 Caroline Chan
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
@@ -0,0 +1,133 @@
|
||||
import os
|
||||
import cv2
|
||||
import torch
|
||||
import numpy as np
|
||||
|
||||
import torch.nn as nn
|
||||
from einops import rearrange
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
|
||||
|
||||
norm_layer = nn.InstanceNorm2d
|
||||
|
||||
|
||||
class ResidualBlock(nn.Module):
|
||||
def __init__(self, in_features):
|
||||
super(ResidualBlock, self).__init__()
|
||||
|
||||
conv_block = [ nn.ReflectionPad2d(1),
|
||||
nn.Conv2d(in_features, in_features, 3),
|
||||
norm_layer(in_features),
|
||||
nn.ReLU(inplace=True),
|
||||
nn.ReflectionPad2d(1),
|
||||
nn.Conv2d(in_features, in_features, 3),
|
||||
norm_layer(in_features)
|
||||
]
|
||||
|
||||
self.conv_block = nn.Sequential(*conv_block)
|
||||
|
||||
def forward(self, x):
|
||||
return x + self.conv_block(x)
|
||||
|
||||
|
||||
class Generator(nn.Module):
|
||||
def __init__(self, input_nc, output_nc, n_residual_blocks=9, sigmoid=True):
|
||||
super(Generator, self).__init__()
|
||||
|
||||
# Initial convolution block
|
||||
model0 = [ nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(input_nc, 64, 7),
|
||||
norm_layer(64),
|
||||
nn.ReLU(inplace=True) ]
|
||||
self.model0 = nn.Sequential(*model0)
|
||||
|
||||
# Downsampling
|
||||
model1 = []
|
||||
in_features = 64
|
||||
out_features = in_features*2
|
||||
for _ in range(2):
|
||||
model1 += [ nn.Conv2d(in_features, out_features, 3, stride=2, padding=1),
|
||||
norm_layer(out_features),
|
||||
nn.ReLU(inplace=True) ]
|
||||
in_features = out_features
|
||||
out_features = in_features*2
|
||||
self.model1 = nn.Sequential(*model1)
|
||||
|
||||
model2 = []
|
||||
# Residual blocks
|
||||
for _ in range(n_residual_blocks):
|
||||
model2 += [ResidualBlock(in_features)]
|
||||
self.model2 = nn.Sequential(*model2)
|
||||
|
||||
# Upsampling
|
||||
model3 = []
|
||||
out_features = in_features//2
|
||||
for _ in range(2):
|
||||
model3 += [ nn.ConvTranspose2d(in_features, out_features, 3, stride=2, padding=1, output_padding=1),
|
||||
norm_layer(out_features),
|
||||
nn.ReLU(inplace=True) ]
|
||||
in_features = out_features
|
||||
out_features = in_features//2
|
||||
self.model3 = nn.Sequential(*model3)
|
||||
|
||||
# Output layer
|
||||
model4 = [ nn.ReflectionPad2d(3),
|
||||
nn.Conv2d(64, output_nc, 7)]
|
||||
if sigmoid:
|
||||
model4 += [nn.Sigmoid()]
|
||||
|
||||
self.model4 = nn.Sequential(*model4)
|
||||
|
||||
def forward(self, x, cond=None):
|
||||
out = self.model0(x)
|
||||
out = self.model1(out)
|
||||
out = self.model2(out)
|
||||
out = self.model3(out)
|
||||
out = self.model4(out)
|
||||
|
||||
return out
|
||||
|
||||
|
||||
class LineartDetector:
|
||||
model_dir = os.path.join(models_path, "lineart")
|
||||
model_default = 'sk_model.pth'
|
||||
model_coarse = 'sk_model2.pth'
|
||||
|
||||
def __init__(self, model_name):
|
||||
self.model = None
|
||||
self.model_name = model_name
|
||||
self.device = devices.get_device_for("controlnet")
|
||||
|
||||
def load_model(self, name):
|
||||
remote_model_path = "https://huggingface.co/lllyasviel/Annotators/resolve/main/" + name
|
||||
model_path = os.path.join(self.model_dir, name)
|
||||
if not os.path.exists(model_path):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=self.model_dir)
|
||||
model = Generator(3, 1, 3)
|
||||
model.load_state_dict(torch.load(model_path, map_location=torch.device('cpu')))
|
||||
model.eval()
|
||||
self.model = model.to(self.device)
|
||||
|
||||
def unload_model(self):
|
||||
if self.model is not None:
|
||||
self.model.cpu()
|
||||
|
||||
def __call__(self, input_image):
|
||||
if self.model is None:
|
||||
self.load_model(self.model_name)
|
||||
self.model.to(self.device)
|
||||
|
||||
assert input_image.ndim == 3
|
||||
image = input_image
|
||||
with torch.no_grad():
|
||||
image = torch.from_numpy(image).float().to(self.device)
|
||||
image = image / 255.0
|
||||
image = rearrange(image, 'h w c -> 1 c h w')
|
||||
line = self.model(image)[0][0]
|
||||
|
||||
line = line.cpu().numpy()
|
||||
line = (line * 255.0).clip(0, 255).astype(np.uint8)
|
||||
|
||||
return line
|
||||
@@ -0,0 +1,21 @@
|
||||
MIT License
|
||||
|
||||
Copyright (c) 2022 Caroline Chan
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
@@ -0,0 +1,161 @@
|
||||
import numpy as np
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import functools
|
||||
|
||||
import os
|
||||
import cv2
|
||||
from einops import rearrange
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
|
||||
|
||||
class UnetGenerator(nn.Module):
|
||||
"""Create a Unet-based generator"""
|
||||
|
||||
def __init__(self, input_nc, output_nc, num_downs, ngf=64, norm_layer=nn.BatchNorm2d, use_dropout=False):
|
||||
"""Construct a Unet generator
|
||||
Parameters:
|
||||
input_nc (int) -- the number of channels in input images
|
||||
output_nc (int) -- the number of channels in output images
|
||||
num_downs (int) -- the number of downsamplings in UNet. For example, # if |num_downs| == 7,
|
||||
image of size 128x128 will become of size 1x1 # at the bottleneck
|
||||
ngf (int) -- the number of filters in the last conv layer
|
||||
norm_layer -- normalization layer
|
||||
We construct the U-Net from the innermost layer to the outermost layer.
|
||||
It is a recursive process.
|
||||
"""
|
||||
super(UnetGenerator, self).__init__()
|
||||
# construct unet structure
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 8, ngf * 8, input_nc=None, submodule=None, norm_layer=norm_layer, innermost=True) # add the innermost layer
|
||||
for _ in range(num_downs - 5): # add intermediate layers with ngf * 8 filters
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 8, ngf * 8, input_nc=None, submodule=unet_block, norm_layer=norm_layer, use_dropout=use_dropout)
|
||||
# gradually reduce the number of filters from ngf * 8 to ngf
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 4, ngf * 8, input_nc=None, submodule=unet_block, norm_layer=norm_layer)
|
||||
unet_block = UnetSkipConnectionBlock(ngf * 2, ngf * 4, input_nc=None, submodule=unet_block, norm_layer=norm_layer)
|
||||
unet_block = UnetSkipConnectionBlock(ngf, ngf * 2, input_nc=None, submodule=unet_block, norm_layer=norm_layer)
|
||||
self.model = UnetSkipConnectionBlock(output_nc, ngf, input_nc=input_nc, submodule=unet_block, outermost=True, norm_layer=norm_layer) # add the outermost layer
|
||||
|
||||
def forward(self, input):
|
||||
"""Standard forward"""
|
||||
return self.model(input)
|
||||
|
||||
|
||||
class UnetSkipConnectionBlock(nn.Module):
|
||||
"""Defines the Unet submodule with skip connection.
|
||||
X -------------------identity----------------------
|
||||
|-- downsampling -- |submodule| -- upsampling --|
|
||||
"""
|
||||
|
||||
def __init__(self, outer_nc, inner_nc, input_nc=None,
|
||||
submodule=None, outermost=False, innermost=False, norm_layer=nn.BatchNorm2d, use_dropout=False):
|
||||
"""Construct a Unet submodule with skip connections.
|
||||
Parameters:
|
||||
outer_nc (int) -- the number of filters in the outer conv layer
|
||||
inner_nc (int) -- the number of filters in the inner conv layer
|
||||
input_nc (int) -- the number of channels in input images/features
|
||||
submodule (UnetSkipConnectionBlock) -- previously defined submodules
|
||||
outermost (bool) -- if this module is the outermost module
|
||||
innermost (bool) -- if this module is the innermost module
|
||||
norm_layer -- normalization layer
|
||||
use_dropout (bool) -- if use dropout layers.
|
||||
"""
|
||||
super(UnetSkipConnectionBlock, self).__init__()
|
||||
self.outermost = outermost
|
||||
if type(norm_layer) == functools.partial:
|
||||
use_bias = norm_layer.func == nn.InstanceNorm2d
|
||||
else:
|
||||
use_bias = norm_layer == nn.InstanceNorm2d
|
||||
if input_nc is None:
|
||||
input_nc = outer_nc
|
||||
downconv = nn.Conv2d(input_nc, inner_nc, kernel_size=4,
|
||||
stride=2, padding=1, bias=use_bias)
|
||||
downrelu = nn.LeakyReLU(0.2, True)
|
||||
downnorm = norm_layer(inner_nc)
|
||||
uprelu = nn.ReLU(True)
|
||||
upnorm = norm_layer(outer_nc)
|
||||
|
||||
if outermost:
|
||||
upconv = nn.ConvTranspose2d(inner_nc * 2, outer_nc,
|
||||
kernel_size=4, stride=2,
|
||||
padding=1)
|
||||
down = [downconv]
|
||||
up = [uprelu, upconv, nn.Tanh()]
|
||||
model = down + [submodule] + up
|
||||
elif innermost:
|
||||
upconv = nn.ConvTranspose2d(inner_nc, outer_nc,
|
||||
kernel_size=4, stride=2,
|
||||
padding=1, bias=use_bias)
|
||||
down = [downrelu, downconv]
|
||||
up = [uprelu, upconv, upnorm]
|
||||
model = down + up
|
||||
else:
|
||||
upconv = nn.ConvTranspose2d(inner_nc * 2, outer_nc,
|
||||
kernel_size=4, stride=2,
|
||||
padding=1, bias=use_bias)
|
||||
down = [downrelu, downconv, downnorm]
|
||||
up = [uprelu, upconv, upnorm]
|
||||
|
||||
if use_dropout:
|
||||
model = down + [submodule] + up + [nn.Dropout(0.5)]
|
||||
else:
|
||||
model = down + [submodule] + up
|
||||
|
||||
self.model = nn.Sequential(*model)
|
||||
|
||||
def forward(self, x):
|
||||
if self.outermost:
|
||||
return self.model(x)
|
||||
else: # add skip connections
|
||||
return torch.cat([x, self.model(x)], 1)
|
||||
|
||||
|
||||
class LineartAnimeDetector:
|
||||
model_dir = os.path.join(models_path, "lineart_anime")
|
||||
|
||||
def __init__(self):
|
||||
self.model = None
|
||||
self.device = devices.get_device_for("controlnet")
|
||||
|
||||
def load_model(self):
|
||||
remote_model_path = "https://huggingface.co/lllyasviel/Annotators/resolve/main/netG.pth"
|
||||
modelpath = os.path.join(self.model_dir, "netG.pth")
|
||||
if not os.path.exists(modelpath):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=self.model_dir)
|
||||
norm_layer = functools.partial(nn.InstanceNorm2d, affine=False, track_running_stats=False)
|
||||
net = UnetGenerator(3, 1, 8, 64, norm_layer=norm_layer, use_dropout=False)
|
||||
ckpt = torch.load(modelpath)
|
||||
for key in list(ckpt.keys()):
|
||||
if 'module.' in key:
|
||||
ckpt[key.replace('module.', '')] = ckpt[key]
|
||||
del ckpt[key]
|
||||
net.load_state_dict(ckpt)
|
||||
net.eval()
|
||||
self.model = net.to(self.device)
|
||||
|
||||
def unload_model(self):
|
||||
if self.model is not None:
|
||||
self.model.cpu()
|
||||
|
||||
def __call__(self, input_image):
|
||||
if self.model is None:
|
||||
self.load_model()
|
||||
self.model.to(self.device)
|
||||
|
||||
H, W, C = input_image.shape
|
||||
Hn = 256 * int(np.ceil(float(H) / 256.0))
|
||||
Wn = 256 * int(np.ceil(float(W) / 256.0))
|
||||
img = cv2.resize(input_image, (Wn, Hn), interpolation=cv2.INTER_CUBIC)
|
||||
with torch.no_grad():
|
||||
image_feed = torch.from_numpy(img).float().to(self.device)
|
||||
image_feed = image_feed / 127.5 - 1.0
|
||||
image_feed = rearrange(image_feed, 'h w c -> 1 c h w')
|
||||
|
||||
line = self.model(image_feed)[0, 0] * 127.5 + 127.5
|
||||
line = line.cpu().numpy()
|
||||
|
||||
line = cv2.resize(line, (W, H), interpolation=cv2.INTER_CUBIC)
|
||||
line = line.clip(0, 255).astype(np.uint8)
|
||||
return line
|
||||
|
||||
@@ -0,0 +1,21 @@
|
||||
MIT License
|
||||
|
||||
Copyright (c) 2021 Miaomiao Li
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
@@ -0,0 +1,248 @@
|
||||
import os
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
from PIL import Image
|
||||
import fnmatch
|
||||
import cv2
|
||||
|
||||
import sys
|
||||
|
||||
import numpy as np
|
||||
from einops import rearrange
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
|
||||
|
||||
class _bn_relu_conv(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, fw, fh, subsample=1):
|
||||
super(_bn_relu_conv, self).__init__()
|
||||
self.model = nn.Sequential(
|
||||
nn.BatchNorm2d(in_filters, eps=1e-3),
|
||||
nn.LeakyReLU(0.2),
|
||||
nn.Conv2d(in_filters, nb_filters, (fw, fh), stride=subsample, padding=(fw//2, fh//2), padding_mode='zeros')
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
return self.model(x)
|
||||
|
||||
# the following are for debugs
|
||||
print("****", np.max(x.cpu().numpy()), np.min(x.cpu().numpy()), np.mean(x.cpu().numpy()), np.std(x.cpu().numpy()), x.shape)
|
||||
for i,layer in enumerate(self.model):
|
||||
if i != 2:
|
||||
x = layer(x)
|
||||
else:
|
||||
x = layer(x)
|
||||
#x = nn.functional.pad(x, (1, 1, 1, 1), mode='constant', value=0)
|
||||
print("____", np.max(x.cpu().numpy()), np.min(x.cpu().numpy()), np.mean(x.cpu().numpy()), np.std(x.cpu().numpy()), x.shape)
|
||||
print(x[0])
|
||||
return x
|
||||
|
||||
class _u_bn_relu_conv(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, fw, fh, subsample=1):
|
||||
super(_u_bn_relu_conv, self).__init__()
|
||||
self.model = nn.Sequential(
|
||||
nn.BatchNorm2d(in_filters, eps=1e-3),
|
||||
nn.LeakyReLU(0.2),
|
||||
nn.Conv2d(in_filters, nb_filters, (fw, fh), stride=subsample, padding=(fw//2, fh//2)),
|
||||
nn.Upsample(scale_factor=2, mode='nearest')
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
return self.model(x)
|
||||
|
||||
|
||||
|
||||
class _shortcut(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, subsample=1):
|
||||
super(_shortcut, self).__init__()
|
||||
self.process = False
|
||||
self.model = None
|
||||
if in_filters != nb_filters or subsample != 1:
|
||||
self.process = True
|
||||
self.model = nn.Sequential(
|
||||
nn.Conv2d(in_filters, nb_filters, (1, 1), stride=subsample)
|
||||
)
|
||||
|
||||
def forward(self, x, y):
|
||||
#print(x.size(), y.size(), self.process)
|
||||
if self.process:
|
||||
y0 = self.model(x)
|
||||
#print("merge+", torch.max(y0+y), torch.min(y0+y),torch.mean(y0+y), torch.std(y0+y), y0.shape)
|
||||
return y0 + y
|
||||
else:
|
||||
#print("merge", torch.max(x+y), torch.min(x+y),torch.mean(x+y), torch.std(x+y), y.shape)
|
||||
return x + y
|
||||
|
||||
class _u_shortcut(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, subsample):
|
||||
super(_u_shortcut, self).__init__()
|
||||
self.process = False
|
||||
self.model = None
|
||||
if in_filters != nb_filters:
|
||||
self.process = True
|
||||
self.model = nn.Sequential(
|
||||
nn.Conv2d(in_filters, nb_filters, (1, 1), stride=subsample, padding_mode='zeros'),
|
||||
nn.Upsample(scale_factor=2, mode='nearest')
|
||||
)
|
||||
|
||||
def forward(self, x, y):
|
||||
if self.process:
|
||||
return self.model(x) + y
|
||||
else:
|
||||
return x + y
|
||||
|
||||
|
||||
class basic_block(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, init_subsample=1):
|
||||
super(basic_block, self).__init__()
|
||||
self.conv1 = _bn_relu_conv(in_filters, nb_filters, 3, 3, subsample=init_subsample)
|
||||
self.residual = _bn_relu_conv(nb_filters, nb_filters, 3, 3)
|
||||
self.shortcut = _shortcut(in_filters, nb_filters, subsample=init_subsample)
|
||||
|
||||
def forward(self, x):
|
||||
x1 = self.conv1(x)
|
||||
x2 = self.residual(x1)
|
||||
return self.shortcut(x, x2)
|
||||
|
||||
class _u_basic_block(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, init_subsample=1):
|
||||
super(_u_basic_block, self).__init__()
|
||||
self.conv1 = _u_bn_relu_conv(in_filters, nb_filters, 3, 3, subsample=init_subsample)
|
||||
self.residual = _bn_relu_conv(nb_filters, nb_filters, 3, 3)
|
||||
self.shortcut = _u_shortcut(in_filters, nb_filters, subsample=init_subsample)
|
||||
|
||||
def forward(self, x):
|
||||
y = self.residual(self.conv1(x))
|
||||
return self.shortcut(x, y)
|
||||
|
||||
|
||||
class _residual_block(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, repetitions, is_first_layer=False):
|
||||
super(_residual_block, self).__init__()
|
||||
layers = []
|
||||
for i in range(repetitions):
|
||||
init_subsample = 1
|
||||
if i == repetitions - 1 and not is_first_layer:
|
||||
init_subsample = 2
|
||||
if i == 0:
|
||||
l = basic_block(in_filters=in_filters, nb_filters=nb_filters, init_subsample=init_subsample)
|
||||
else:
|
||||
l = basic_block(in_filters=nb_filters, nb_filters=nb_filters, init_subsample=init_subsample)
|
||||
layers.append(l)
|
||||
|
||||
self.model = nn.Sequential(*layers)
|
||||
|
||||
def forward(self, x):
|
||||
return self.model(x)
|
||||
|
||||
|
||||
class _upsampling_residual_block(nn.Module):
|
||||
def __init__(self, in_filters, nb_filters, repetitions):
|
||||
super(_upsampling_residual_block, self).__init__()
|
||||
layers = []
|
||||
for i in range(repetitions):
|
||||
l = None
|
||||
if i == 0:
|
||||
l = _u_basic_block(in_filters=in_filters, nb_filters=nb_filters)#(input)
|
||||
else:
|
||||
l = basic_block(in_filters=nb_filters, nb_filters=nb_filters)#(input)
|
||||
layers.append(l)
|
||||
|
||||
self.model = nn.Sequential(*layers)
|
||||
|
||||
def forward(self, x):
|
||||
return self.model(x)
|
||||
|
||||
|
||||
class res_skip(nn.Module):
|
||||
|
||||
def __init__(self):
|
||||
super(res_skip, self).__init__()
|
||||
self.block0 = _residual_block(in_filters=1, nb_filters=24, repetitions=2, is_first_layer=True)#(input)
|
||||
self.block1 = _residual_block(in_filters=24, nb_filters=48, repetitions=3)#(block0)
|
||||
self.block2 = _residual_block(in_filters=48, nb_filters=96, repetitions=5)#(block1)
|
||||
self.block3 = _residual_block(in_filters=96, nb_filters=192, repetitions=7)#(block2)
|
||||
self.block4 = _residual_block(in_filters=192, nb_filters=384, repetitions=12)#(block3)
|
||||
|
||||
self.block5 = _upsampling_residual_block(in_filters=384, nb_filters=192, repetitions=7)#(block4)
|
||||
self.res1 = _shortcut(in_filters=192, nb_filters=192)#(block3, block5, subsample=(1,1))
|
||||
|
||||
self.block6 = _upsampling_residual_block(in_filters=192, nb_filters=96, repetitions=5)#(res1)
|
||||
self.res2 = _shortcut(in_filters=96, nb_filters=96)#(block2, block6, subsample=(1,1))
|
||||
|
||||
self.block7 = _upsampling_residual_block(in_filters=96, nb_filters=48, repetitions=3)#(res2)
|
||||
self.res3 = _shortcut(in_filters=48, nb_filters=48)#(block1, block7, subsample=(1,1))
|
||||
|
||||
self.block8 = _upsampling_residual_block(in_filters=48, nb_filters=24, repetitions=2)#(res3)
|
||||
self.res4 = _shortcut(in_filters=24, nb_filters=24)#(block0,block8, subsample=(1,1))
|
||||
|
||||
self.block9 = _residual_block(in_filters=24, nb_filters=16, repetitions=2, is_first_layer=True)#(res4)
|
||||
self.conv15 = _bn_relu_conv(in_filters=16, nb_filters=1, fh=1, fw=1, subsample=1)#(block7)
|
||||
|
||||
def forward(self, x):
|
||||
x0 = self.block0(x)
|
||||
x1 = self.block1(x0)
|
||||
x2 = self.block2(x1)
|
||||
x3 = self.block3(x2)
|
||||
x4 = self.block4(x3)
|
||||
|
||||
x5 = self.block5(x4)
|
||||
res1 = self.res1(x3, x5)
|
||||
|
||||
x6 = self.block6(res1)
|
||||
res2 = self.res2(x2, x6)
|
||||
|
||||
x7 = self.block7(res2)
|
||||
res3 = self.res3(x1, x7)
|
||||
|
||||
x8 = self.block8(res3)
|
||||
res4 = self.res4(x0, x8)
|
||||
|
||||
x9 = self.block9(res4)
|
||||
y = self.conv15(x9)
|
||||
|
||||
return y
|
||||
|
||||
|
||||
class MangaLineExtration:
|
||||
model_dir = os.path.join(models_path, "manga_line")
|
||||
|
||||
def __init__(self):
|
||||
self.model = None
|
||||
self.device = devices.get_device_for("controlnet")
|
||||
|
||||
def load_model(self):
|
||||
remote_model_path = "https://huggingface.co/lllyasviel/Annotators/resolve/main/erika.pth"
|
||||
modelpath = os.path.join(self.model_dir, "erika.pth")
|
||||
if not os.path.exists(modelpath):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=self.model_dir)
|
||||
#norm_layer = functools.partial(nn.InstanceNorm2d, affine=False, track_running_stats=False)
|
||||
net = res_skip()
|
||||
ckpt = torch.load(modelpath)
|
||||
for key in list(ckpt.keys()):
|
||||
if 'module.' in key:
|
||||
ckpt[key.replace('module.', '')] = ckpt[key]
|
||||
del ckpt[key]
|
||||
net.load_state_dict(ckpt)
|
||||
net.eval()
|
||||
self.model = net.to(self.device)
|
||||
|
||||
def unload_model(self):
|
||||
if self.model is not None:
|
||||
self.model.cpu()
|
||||
|
||||
def __call__(self, input_image):
|
||||
if self.model is None:
|
||||
self.load_model()
|
||||
self.model.to(self.device)
|
||||
img = cv2.cvtColor(input_image, cv2.COLOR_RGB2GRAY)
|
||||
img = np.ascontiguousarray(img.copy()).copy()
|
||||
with torch.no_grad():
|
||||
image_feed = torch.from_numpy(img).float().to(self.device)
|
||||
image_feed = rearrange(image_feed, 'h w -> 1 1 h w')
|
||||
line = self.model(image_feed)
|
||||
line = 255 - line.cpu().numpy()[0, 0]
|
||||
return line.clip(0, 255).astype(np.uint8)
|
||||
|
||||
|
||||
@@ -0,0 +1,5 @@
|
||||
from .mediapipe_face_common import generate_annotation
|
||||
|
||||
|
||||
def apply_mediapipe_face(image, max_faces: int = 1, min_confidence: float = 0.5):
|
||||
return generate_annotation(image, max_faces, min_confidence)
|
||||
@@ -0,0 +1,155 @@
|
||||
from typing import Mapping
|
||||
|
||||
import mediapipe as mp
|
||||
import numpy
|
||||
|
||||
|
||||
mp_drawing = mp.solutions.drawing_utils
|
||||
mp_drawing_styles = mp.solutions.drawing_styles
|
||||
mp_face_detection = mp.solutions.face_detection # Only for counting faces.
|
||||
mp_face_mesh = mp.solutions.face_mesh
|
||||
mp_face_connections = mp.solutions.face_mesh_connections.FACEMESH_TESSELATION
|
||||
mp_hand_connections = mp.solutions.hands_connections.HAND_CONNECTIONS
|
||||
mp_body_connections = mp.solutions.pose_connections.POSE_CONNECTIONS
|
||||
|
||||
DrawingSpec = mp.solutions.drawing_styles.DrawingSpec
|
||||
PoseLandmark = mp.solutions.drawing_styles.PoseLandmark
|
||||
|
||||
min_face_size_pixels: int = 64
|
||||
f_thick = 2
|
||||
f_rad = 1
|
||||
right_iris_draw = DrawingSpec(color=(10, 200, 250), thickness=f_thick, circle_radius=f_rad)
|
||||
right_eye_draw = DrawingSpec(color=(10, 200, 180), thickness=f_thick, circle_radius=f_rad)
|
||||
right_eyebrow_draw = DrawingSpec(color=(10, 220, 180), thickness=f_thick, circle_radius=f_rad)
|
||||
left_iris_draw = DrawingSpec(color=(250, 200, 10), thickness=f_thick, circle_radius=f_rad)
|
||||
left_eye_draw = DrawingSpec(color=(180, 200, 10), thickness=f_thick, circle_radius=f_rad)
|
||||
left_eyebrow_draw = DrawingSpec(color=(180, 220, 10), thickness=f_thick, circle_radius=f_rad)
|
||||
mouth_draw = DrawingSpec(color=(10, 180, 10), thickness=f_thick, circle_radius=f_rad)
|
||||
head_draw = DrawingSpec(color=(10, 200, 10), thickness=f_thick, circle_radius=f_rad)
|
||||
|
||||
# mp_face_mesh.FACEMESH_CONTOURS has all the items we care about.
|
||||
face_connection_spec = {}
|
||||
for edge in mp_face_mesh.FACEMESH_FACE_OVAL:
|
||||
face_connection_spec[edge] = head_draw
|
||||
for edge in mp_face_mesh.FACEMESH_LEFT_EYE:
|
||||
face_connection_spec[edge] = left_eye_draw
|
||||
for edge in mp_face_mesh.FACEMESH_LEFT_EYEBROW:
|
||||
face_connection_spec[edge] = left_eyebrow_draw
|
||||
# for edge in mp_face_mesh.FACEMESH_LEFT_IRIS:
|
||||
# face_connection_spec[edge] = left_iris_draw
|
||||
for edge in mp_face_mesh.FACEMESH_RIGHT_EYE:
|
||||
face_connection_spec[edge] = right_eye_draw
|
||||
for edge in mp_face_mesh.FACEMESH_RIGHT_EYEBROW:
|
||||
face_connection_spec[edge] = right_eyebrow_draw
|
||||
# for edge in mp_face_mesh.FACEMESH_RIGHT_IRIS:
|
||||
# face_connection_spec[edge] = right_iris_draw
|
||||
for edge in mp_face_mesh.FACEMESH_LIPS:
|
||||
face_connection_spec[edge] = mouth_draw
|
||||
iris_landmark_spec = {468: right_iris_draw, 473: left_iris_draw}
|
||||
|
||||
|
||||
def draw_pupils(image, landmark_list, drawing_spec, halfwidth: int = 2):
|
||||
"""We have a custom function to draw the pupils because the mp.draw_landmarks method requires a parameter for all
|
||||
landmarks. Until our PR is merged into mediapipe, we need this separate method."""
|
||||
if len(image.shape) != 3:
|
||||
raise ValueError("Input image must be H,W,C.")
|
||||
image_rows, image_cols, image_channels = image.shape
|
||||
if image_channels != 3: # BGR channels
|
||||
raise ValueError('Input image must contain three channel bgr data.')
|
||||
for idx, landmark in enumerate(landmark_list.landmark):
|
||||
if (
|
||||
(landmark.HasField('visibility') and landmark.visibility < 0.9) or
|
||||
(landmark.HasField('presence') and landmark.presence < 0.5)
|
||||
):
|
||||
continue
|
||||
if landmark.x >= 1.0 or landmark.x < 0 or landmark.y >= 1.0 or landmark.y < 0:
|
||||
continue
|
||||
image_x = int(image_cols*landmark.x)
|
||||
image_y = int(image_rows*landmark.y)
|
||||
draw_color = None
|
||||
if isinstance(drawing_spec, Mapping):
|
||||
if drawing_spec.get(idx) is None:
|
||||
continue
|
||||
else:
|
||||
draw_color = drawing_spec[idx].color
|
||||
elif isinstance(drawing_spec, DrawingSpec):
|
||||
draw_color = drawing_spec.color
|
||||
image[image_y-halfwidth:image_y+halfwidth, image_x-halfwidth:image_x+halfwidth, :] = draw_color
|
||||
|
||||
|
||||
def reverse_channels(image):
|
||||
"""Given a numpy array in RGB form, convert to BGR. Will also convert from BGR to RGB."""
|
||||
# im[:,:,::-1] is a neat hack to convert BGR to RGB by reversing the indexing order.
|
||||
# im[:,:,::[2,1,0]] would also work but makes a copy of the data.
|
||||
return image[:, :, ::-1]
|
||||
|
||||
|
||||
def generate_annotation(
|
||||
img_rgb,
|
||||
max_faces: int,
|
||||
min_confidence: float
|
||||
):
|
||||
"""
|
||||
Find up to 'max_faces' inside the provided input image.
|
||||
If min_face_size_pixels is provided and nonzero it will be used to filter faces that occupy less than this many
|
||||
pixels in the image.
|
||||
"""
|
||||
with mp_face_mesh.FaceMesh(
|
||||
static_image_mode=True,
|
||||
max_num_faces=max_faces,
|
||||
refine_landmarks=True,
|
||||
min_detection_confidence=min_confidence,
|
||||
) as facemesh:
|
||||
img_height, img_width, img_channels = img_rgb.shape
|
||||
assert(img_channels == 3)
|
||||
|
||||
results = facemesh.process(img_rgb).multi_face_landmarks
|
||||
|
||||
if results is None:
|
||||
print("No faces detected in controlnet image for Mediapipe face annotator.")
|
||||
return numpy.zeros_like(img_rgb)
|
||||
|
||||
# Filter faces that are too small
|
||||
filtered_landmarks = []
|
||||
for lm in results:
|
||||
landmarks = lm.landmark
|
||||
face_rect = [
|
||||
landmarks[0].x,
|
||||
landmarks[0].y,
|
||||
landmarks[0].x,
|
||||
landmarks[0].y,
|
||||
] # Left, up, right, down.
|
||||
for i in range(len(landmarks)):
|
||||
face_rect[0] = min(face_rect[0], landmarks[i].x)
|
||||
face_rect[1] = min(face_rect[1], landmarks[i].y)
|
||||
face_rect[2] = max(face_rect[2], landmarks[i].x)
|
||||
face_rect[3] = max(face_rect[3], landmarks[i].y)
|
||||
if min_face_size_pixels > 0:
|
||||
face_width = abs(face_rect[2] - face_rect[0])
|
||||
face_height = abs(face_rect[3] - face_rect[1])
|
||||
face_width_pixels = face_width * img_width
|
||||
face_height_pixels = face_height * img_height
|
||||
face_size = min(face_width_pixels, face_height_pixels)
|
||||
if face_size >= min_face_size_pixels:
|
||||
filtered_landmarks.append(lm)
|
||||
else:
|
||||
filtered_landmarks.append(lm)
|
||||
|
||||
# Annotations are drawn in BGR for some reason, but we don't need to flip a zero-filled image at the start.
|
||||
empty = numpy.zeros_like(img_rgb)
|
||||
|
||||
# Draw detected faces:
|
||||
for face_landmarks in filtered_landmarks:
|
||||
mp_drawing.draw_landmarks(
|
||||
empty,
|
||||
face_landmarks,
|
||||
connections=face_connection_spec.keys(),
|
||||
landmark_drawing_spec=None,
|
||||
connection_drawing_spec=face_connection_spec
|
||||
)
|
||||
draw_pupils(empty, face_landmarks, iris_landmark_spec, 2)
|
||||
|
||||
# Flip BGR back to RGB.
|
||||
empty = reverse_channels(empty).copy()
|
||||
|
||||
return empty
|
||||
@@ -0,0 +1,21 @@
|
||||
MIT License
|
||||
|
||||
Copyright (c) 2019 Intel ISL (Intel Intelligent Systems Lab)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
@@ -0,0 +1,49 @@
|
||||
import cv2
|
||||
import numpy as np
|
||||
import torch
|
||||
|
||||
from einops import rearrange
|
||||
from .api import MiDaSInference
|
||||
from modules import devices
|
||||
|
||||
model = None
|
||||
|
||||
def unload_midas_model():
|
||||
global model
|
||||
if model is not None:
|
||||
model = model.cpu()
|
||||
|
||||
def apply_midas(input_image, a=np.pi * 2.0, bg_th=0.1):
|
||||
global model
|
||||
if model is None:
|
||||
model = MiDaSInference(model_type="dpt_hybrid")
|
||||
if devices.get_device_for("controlnet").type != 'mps':
|
||||
model = model.to(devices.get_device_for("controlnet"))
|
||||
|
||||
assert input_image.ndim == 3
|
||||
image_depth = input_image
|
||||
with torch.no_grad():
|
||||
image_depth = torch.from_numpy(image_depth).float()
|
||||
if devices.get_device_for("controlnet").type != 'mps':
|
||||
image_depth = image_depth.to(devices.get_device_for("controlnet"))
|
||||
image_depth = image_depth / 127.5 - 1.0
|
||||
image_depth = rearrange(image_depth, 'h w c -> 1 c h w')
|
||||
depth = model(image_depth)[0]
|
||||
|
||||
depth_pt = depth.clone()
|
||||
depth_pt -= torch.min(depth_pt)
|
||||
depth_pt /= torch.max(depth_pt)
|
||||
depth_pt = depth_pt.cpu().numpy()
|
||||
depth_image = (depth_pt * 255.0).clip(0, 255).astype(np.uint8)
|
||||
|
||||
depth_np = depth.cpu().numpy()
|
||||
x = cv2.Sobel(depth_np, cv2.CV_32F, 1, 0, ksize=3)
|
||||
y = cv2.Sobel(depth_np, cv2.CV_32F, 0, 1, ksize=3)
|
||||
z = np.ones_like(x) * a
|
||||
x[depth_pt < bg_th] = 0
|
||||
y[depth_pt < bg_th] = 0
|
||||
normal = np.stack([x, y, z], axis=2)
|
||||
normal /= np.sum(normal ** 2.0, axis=2, keepdims=True) ** 0.5
|
||||
normal_image = (normal * 127.5 + 127.5).clip(0, 255).astype(np.uint8)[:, :, ::-1]
|
||||
|
||||
return depth_image, normal_image
|
||||
181
extensions-builtin/sd_forge_controlnet/annotator/midas/api.py
Normal file
181
extensions-builtin/sd_forge_controlnet/annotator/midas/api.py
Normal file
@@ -0,0 +1,181 @@
|
||||
# based on https://github.com/isl-org/MiDaS
|
||||
|
||||
import cv2
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import os
|
||||
from annotator.annotator_path import models_path
|
||||
|
||||
from torchvision.transforms import Compose
|
||||
|
||||
from .midas.dpt_depth import DPTDepthModel
|
||||
from .midas.midas_net import MidasNet
|
||||
from .midas.midas_net_custom import MidasNet_small
|
||||
from .midas.transforms import Resize, NormalizeImage, PrepareForNet
|
||||
|
||||
base_model_path = os.path.join(models_path, "midas")
|
||||
old_modeldir = os.path.dirname(os.path.realpath(__file__))
|
||||
remote_model_path = "https://huggingface.co/lllyasviel/ControlNet/resolve/main/annotator/ckpts/dpt_hybrid-midas-501f0c75.pt"
|
||||
|
||||
ISL_PATHS = {
|
||||
"dpt_large": os.path.join(base_model_path, "dpt_large-midas-2f21e586.pt"),
|
||||
"dpt_hybrid": os.path.join(base_model_path, "dpt_hybrid-midas-501f0c75.pt"),
|
||||
"midas_v21": "",
|
||||
"midas_v21_small": "",
|
||||
}
|
||||
|
||||
OLD_ISL_PATHS = {
|
||||
"dpt_large": os.path.join(old_modeldir, "dpt_large-midas-2f21e586.pt"),
|
||||
"dpt_hybrid": os.path.join(old_modeldir, "dpt_hybrid-midas-501f0c75.pt"),
|
||||
"midas_v21": "",
|
||||
"midas_v21_small": "",
|
||||
}
|
||||
|
||||
|
||||
def disabled_train(self, mode=True):
|
||||
"""Overwrite model.train with this function to make sure train/eval mode
|
||||
does not change anymore."""
|
||||
return self
|
||||
|
||||
|
||||
def load_midas_transform(model_type):
|
||||
# https://github.com/isl-org/MiDaS/blob/master/run.py
|
||||
# load transform only
|
||||
if model_type == "dpt_large": # DPT-Large
|
||||
net_w, net_h = 384, 384
|
||||
resize_mode = "minimal"
|
||||
normalization = NormalizeImage(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5])
|
||||
|
||||
elif model_type == "dpt_hybrid": # DPT-Hybrid
|
||||
net_w, net_h = 384, 384
|
||||
resize_mode = "minimal"
|
||||
normalization = NormalizeImage(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5])
|
||||
|
||||
elif model_type == "midas_v21":
|
||||
net_w, net_h = 384, 384
|
||||
resize_mode = "upper_bound"
|
||||
normalization = NormalizeImage(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
|
||||
|
||||
elif model_type == "midas_v21_small":
|
||||
net_w, net_h = 256, 256
|
||||
resize_mode = "upper_bound"
|
||||
normalization = NormalizeImage(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
|
||||
|
||||
else:
|
||||
assert False, f"model_type '{model_type}' not implemented, use: --model_type large"
|
||||
|
||||
transform = Compose(
|
||||
[
|
||||
Resize(
|
||||
net_w,
|
||||
net_h,
|
||||
resize_target=None,
|
||||
keep_aspect_ratio=True,
|
||||
ensure_multiple_of=32,
|
||||
resize_method=resize_mode,
|
||||
image_interpolation_method=cv2.INTER_CUBIC,
|
||||
),
|
||||
normalization,
|
||||
PrepareForNet(),
|
||||
]
|
||||
)
|
||||
|
||||
return transform
|
||||
|
||||
|
||||
def load_model(model_type):
|
||||
# https://github.com/isl-org/MiDaS/blob/master/run.py
|
||||
# load network
|
||||
model_path = ISL_PATHS[model_type]
|
||||
old_model_path = OLD_ISL_PATHS[model_type]
|
||||
if model_type == "dpt_large": # DPT-Large
|
||||
model = DPTDepthModel(
|
||||
path=model_path,
|
||||
backbone="vitl16_384",
|
||||
non_negative=True,
|
||||
)
|
||||
net_w, net_h = 384, 384
|
||||
resize_mode = "minimal"
|
||||
normalization = NormalizeImage(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5])
|
||||
|
||||
elif model_type == "dpt_hybrid": # DPT-Hybrid
|
||||
if os.path.exists(old_model_path):
|
||||
model_path = old_model_path
|
||||
elif not os.path.exists(model_path):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=base_model_path)
|
||||
|
||||
model = DPTDepthModel(
|
||||
path=model_path,
|
||||
backbone="vitb_rn50_384",
|
||||
non_negative=True,
|
||||
)
|
||||
net_w, net_h = 384, 384
|
||||
resize_mode = "minimal"
|
||||
normalization = NormalizeImage(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5])
|
||||
|
||||
elif model_type == "midas_v21":
|
||||
model = MidasNet(model_path, non_negative=True)
|
||||
net_w, net_h = 384, 384
|
||||
resize_mode = "upper_bound"
|
||||
normalization = NormalizeImage(
|
||||
mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]
|
||||
)
|
||||
|
||||
elif model_type == "midas_v21_small":
|
||||
model = MidasNet_small(model_path, features=64, backbone="efficientnet_lite3", exportable=True,
|
||||
non_negative=True, blocks={'expand': True})
|
||||
net_w, net_h = 256, 256
|
||||
resize_mode = "upper_bound"
|
||||
normalization = NormalizeImage(
|
||||
mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]
|
||||
)
|
||||
|
||||
else:
|
||||
print(f"model_type '{model_type}' not implemented, use: --model_type large")
|
||||
assert False
|
||||
|
||||
transform = Compose(
|
||||
[
|
||||
Resize(
|
||||
net_w,
|
||||
net_h,
|
||||
resize_target=None,
|
||||
keep_aspect_ratio=True,
|
||||
ensure_multiple_of=32,
|
||||
resize_method=resize_mode,
|
||||
image_interpolation_method=cv2.INTER_CUBIC,
|
||||
),
|
||||
normalization,
|
||||
PrepareForNet(),
|
||||
]
|
||||
)
|
||||
|
||||
return model.eval(), transform
|
||||
|
||||
|
||||
class MiDaSInference(nn.Module):
|
||||
MODEL_TYPES_TORCH_HUB = [
|
||||
"DPT_Large",
|
||||
"DPT_Hybrid",
|
||||
"MiDaS_small"
|
||||
]
|
||||
MODEL_TYPES_ISL = [
|
||||
"dpt_large",
|
||||
"dpt_hybrid",
|
||||
"midas_v21",
|
||||
"midas_v21_small",
|
||||
]
|
||||
|
||||
def __init__(self, model_type):
|
||||
super().__init__()
|
||||
assert (model_type in self.MODEL_TYPES_ISL)
|
||||
model, _ = load_model(model_type)
|
||||
self.model = model
|
||||
self.model.train = disabled_train
|
||||
|
||||
def forward(self, x):
|
||||
with torch.no_grad():
|
||||
prediction = self.model(x)
|
||||
return prediction
|
||||
|
||||
@@ -0,0 +1,16 @@
|
||||
import torch
|
||||
|
||||
|
||||
class BaseModel(torch.nn.Module):
|
||||
def load(self, path):
|
||||
"""Load model from file.
|
||||
|
||||
Args:
|
||||
path (str): file path
|
||||
"""
|
||||
parameters = torch.load(path, map_location=torch.device('cpu'))
|
||||
|
||||
if "optimizer" in parameters:
|
||||
parameters = parameters["model"]
|
||||
|
||||
self.load_state_dict(parameters)
|
||||
@@ -0,0 +1,342 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
from .vit import (
|
||||
_make_pretrained_vitb_rn50_384,
|
||||
_make_pretrained_vitl16_384,
|
||||
_make_pretrained_vitb16_384,
|
||||
forward_vit,
|
||||
)
|
||||
|
||||
def _make_encoder(backbone, features, use_pretrained, groups=1, expand=False, exportable=True, hooks=None, use_vit_only=False, use_readout="ignore",):
|
||||
if backbone == "vitl16_384":
|
||||
pretrained = _make_pretrained_vitl16_384(
|
||||
use_pretrained, hooks=hooks, use_readout=use_readout
|
||||
)
|
||||
scratch = _make_scratch(
|
||||
[256, 512, 1024, 1024], features, groups=groups, expand=expand
|
||||
) # ViT-L/16 - 85.0% Top1 (backbone)
|
||||
elif backbone == "vitb_rn50_384":
|
||||
pretrained = _make_pretrained_vitb_rn50_384(
|
||||
use_pretrained,
|
||||
hooks=hooks,
|
||||
use_vit_only=use_vit_only,
|
||||
use_readout=use_readout,
|
||||
)
|
||||
scratch = _make_scratch(
|
||||
[256, 512, 768, 768], features, groups=groups, expand=expand
|
||||
) # ViT-H/16 - 85.0% Top1 (backbone)
|
||||
elif backbone == "vitb16_384":
|
||||
pretrained = _make_pretrained_vitb16_384(
|
||||
use_pretrained, hooks=hooks, use_readout=use_readout
|
||||
)
|
||||
scratch = _make_scratch(
|
||||
[96, 192, 384, 768], features, groups=groups, expand=expand
|
||||
) # ViT-B/16 - 84.6% Top1 (backbone)
|
||||
elif backbone == "resnext101_wsl":
|
||||
pretrained = _make_pretrained_resnext101_wsl(use_pretrained)
|
||||
scratch = _make_scratch([256, 512, 1024, 2048], features, groups=groups, expand=expand) # efficientnet_lite3
|
||||
elif backbone == "efficientnet_lite3":
|
||||
pretrained = _make_pretrained_efficientnet_lite3(use_pretrained, exportable=exportable)
|
||||
scratch = _make_scratch([32, 48, 136, 384], features, groups=groups, expand=expand) # efficientnet_lite3
|
||||
else:
|
||||
print(f"Backbone '{backbone}' not implemented")
|
||||
assert False
|
||||
|
||||
return pretrained, scratch
|
||||
|
||||
|
||||
def _make_scratch(in_shape, out_shape, groups=1, expand=False):
|
||||
scratch = nn.Module()
|
||||
|
||||
out_shape1 = out_shape
|
||||
out_shape2 = out_shape
|
||||
out_shape3 = out_shape
|
||||
out_shape4 = out_shape
|
||||
if expand==True:
|
||||
out_shape1 = out_shape
|
||||
out_shape2 = out_shape*2
|
||||
out_shape3 = out_shape*4
|
||||
out_shape4 = out_shape*8
|
||||
|
||||
scratch.layer1_rn = nn.Conv2d(
|
||||
in_shape[0], out_shape1, kernel_size=3, stride=1, padding=1, bias=False, groups=groups
|
||||
)
|
||||
scratch.layer2_rn = nn.Conv2d(
|
||||
in_shape[1], out_shape2, kernel_size=3, stride=1, padding=1, bias=False, groups=groups
|
||||
)
|
||||
scratch.layer3_rn = nn.Conv2d(
|
||||
in_shape[2], out_shape3, kernel_size=3, stride=1, padding=1, bias=False, groups=groups
|
||||
)
|
||||
scratch.layer4_rn = nn.Conv2d(
|
||||
in_shape[3], out_shape4, kernel_size=3, stride=1, padding=1, bias=False, groups=groups
|
||||
)
|
||||
|
||||
return scratch
|
||||
|
||||
|
||||
def _make_pretrained_efficientnet_lite3(use_pretrained, exportable=False):
|
||||
efficientnet = torch.hub.load(
|
||||
"rwightman/gen-efficientnet-pytorch",
|
||||
"tf_efficientnet_lite3",
|
||||
pretrained=use_pretrained,
|
||||
exportable=exportable
|
||||
)
|
||||
return _make_efficientnet_backbone(efficientnet)
|
||||
|
||||
|
||||
def _make_efficientnet_backbone(effnet):
|
||||
pretrained = nn.Module()
|
||||
|
||||
pretrained.layer1 = nn.Sequential(
|
||||
effnet.conv_stem, effnet.bn1, effnet.act1, *effnet.blocks[0:2]
|
||||
)
|
||||
pretrained.layer2 = nn.Sequential(*effnet.blocks[2:3])
|
||||
pretrained.layer3 = nn.Sequential(*effnet.blocks[3:5])
|
||||
pretrained.layer4 = nn.Sequential(*effnet.blocks[5:9])
|
||||
|
||||
return pretrained
|
||||
|
||||
|
||||
def _make_resnet_backbone(resnet):
|
||||
pretrained = nn.Module()
|
||||
pretrained.layer1 = nn.Sequential(
|
||||
resnet.conv1, resnet.bn1, resnet.relu, resnet.maxpool, resnet.layer1
|
||||
)
|
||||
|
||||
pretrained.layer2 = resnet.layer2
|
||||
pretrained.layer3 = resnet.layer3
|
||||
pretrained.layer4 = resnet.layer4
|
||||
|
||||
return pretrained
|
||||
|
||||
|
||||
def _make_pretrained_resnext101_wsl(use_pretrained):
|
||||
resnet = torch.hub.load("facebookresearch/WSL-Images", "resnext101_32x8d_wsl")
|
||||
return _make_resnet_backbone(resnet)
|
||||
|
||||
|
||||
|
||||
class Interpolate(nn.Module):
|
||||
"""Interpolation module.
|
||||
"""
|
||||
|
||||
def __init__(self, scale_factor, mode, align_corners=False):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
scale_factor (float): scaling
|
||||
mode (str): interpolation mode
|
||||
"""
|
||||
super(Interpolate, self).__init__()
|
||||
|
||||
self.interp = nn.functional.interpolate
|
||||
self.scale_factor = scale_factor
|
||||
self.mode = mode
|
||||
self.align_corners = align_corners
|
||||
|
||||
def forward(self, x):
|
||||
"""Forward pass.
|
||||
|
||||
Args:
|
||||
x (tensor): input
|
||||
|
||||
Returns:
|
||||
tensor: interpolated data
|
||||
"""
|
||||
|
||||
x = self.interp(
|
||||
x, scale_factor=self.scale_factor, mode=self.mode, align_corners=self.align_corners
|
||||
)
|
||||
|
||||
return x
|
||||
|
||||
|
||||
class ResidualConvUnit(nn.Module):
|
||||
"""Residual convolution module.
|
||||
"""
|
||||
|
||||
def __init__(self, features):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
features (int): number of features
|
||||
"""
|
||||
super().__init__()
|
||||
|
||||
self.conv1 = nn.Conv2d(
|
||||
features, features, kernel_size=3, stride=1, padding=1, bias=True
|
||||
)
|
||||
|
||||
self.conv2 = nn.Conv2d(
|
||||
features, features, kernel_size=3, stride=1, padding=1, bias=True
|
||||
)
|
||||
|
||||
self.relu = nn.ReLU(inplace=True)
|
||||
|
||||
def forward(self, x):
|
||||
"""Forward pass.
|
||||
|
||||
Args:
|
||||
x (tensor): input
|
||||
|
||||
Returns:
|
||||
tensor: output
|
||||
"""
|
||||
out = self.relu(x)
|
||||
out = self.conv1(out)
|
||||
out = self.relu(out)
|
||||
out = self.conv2(out)
|
||||
|
||||
return out + x
|
||||
|
||||
|
||||
class FeatureFusionBlock(nn.Module):
|
||||
"""Feature fusion block.
|
||||
"""
|
||||
|
||||
def __init__(self, features):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
features (int): number of features
|
||||
"""
|
||||
super(FeatureFusionBlock, self).__init__()
|
||||
|
||||
self.resConfUnit1 = ResidualConvUnit(features)
|
||||
self.resConfUnit2 = ResidualConvUnit(features)
|
||||
|
||||
def forward(self, *xs):
|
||||
"""Forward pass.
|
||||
|
||||
Returns:
|
||||
tensor: output
|
||||
"""
|
||||
output = xs[0]
|
||||
|
||||
if len(xs) == 2:
|
||||
output += self.resConfUnit1(xs[1])
|
||||
|
||||
output = self.resConfUnit2(output)
|
||||
|
||||
output = nn.functional.interpolate(
|
||||
output, scale_factor=2, mode="bilinear", align_corners=True
|
||||
)
|
||||
|
||||
return output
|
||||
|
||||
|
||||
|
||||
|
||||
class ResidualConvUnit_custom(nn.Module):
|
||||
"""Residual convolution module.
|
||||
"""
|
||||
|
||||
def __init__(self, features, activation, bn):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
features (int): number of features
|
||||
"""
|
||||
super().__init__()
|
||||
|
||||
self.bn = bn
|
||||
|
||||
self.groups=1
|
||||
|
||||
self.conv1 = nn.Conv2d(
|
||||
features, features, kernel_size=3, stride=1, padding=1, bias=True, groups=self.groups
|
||||
)
|
||||
|
||||
self.conv2 = nn.Conv2d(
|
||||
features, features, kernel_size=3, stride=1, padding=1, bias=True, groups=self.groups
|
||||
)
|
||||
|
||||
if self.bn==True:
|
||||
self.bn1 = nn.BatchNorm2d(features)
|
||||
self.bn2 = nn.BatchNorm2d(features)
|
||||
|
||||
self.activation = activation
|
||||
|
||||
self.skip_add = nn.quantized.FloatFunctional()
|
||||
|
||||
def forward(self, x):
|
||||
"""Forward pass.
|
||||
|
||||
Args:
|
||||
x (tensor): input
|
||||
|
||||
Returns:
|
||||
tensor: output
|
||||
"""
|
||||
|
||||
out = self.activation(x)
|
||||
out = self.conv1(out)
|
||||
if self.bn==True:
|
||||
out = self.bn1(out)
|
||||
|
||||
out = self.activation(out)
|
||||
out = self.conv2(out)
|
||||
if self.bn==True:
|
||||
out = self.bn2(out)
|
||||
|
||||
if self.groups > 1:
|
||||
out = self.conv_merge(out)
|
||||
|
||||
return self.skip_add.add(out, x)
|
||||
|
||||
# return out + x
|
||||
|
||||
|
||||
class FeatureFusionBlock_custom(nn.Module):
|
||||
"""Feature fusion block.
|
||||
"""
|
||||
|
||||
def __init__(self, features, activation, deconv=False, bn=False, expand=False, align_corners=True):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
features (int): number of features
|
||||
"""
|
||||
super(FeatureFusionBlock_custom, self).__init__()
|
||||
|
||||
self.deconv = deconv
|
||||
self.align_corners = align_corners
|
||||
|
||||
self.groups=1
|
||||
|
||||
self.expand = expand
|
||||
out_features = features
|
||||
if self.expand==True:
|
||||
out_features = features//2
|
||||
|
||||
self.out_conv = nn.Conv2d(features, out_features, kernel_size=1, stride=1, padding=0, bias=True, groups=1)
|
||||
|
||||
self.resConfUnit1 = ResidualConvUnit_custom(features, activation, bn)
|
||||
self.resConfUnit2 = ResidualConvUnit_custom(features, activation, bn)
|
||||
|
||||
self.skip_add = nn.quantized.FloatFunctional()
|
||||
|
||||
def forward(self, *xs):
|
||||
"""Forward pass.
|
||||
|
||||
Returns:
|
||||
tensor: output
|
||||
"""
|
||||
output = xs[0]
|
||||
|
||||
if len(xs) == 2:
|
||||
res = self.resConfUnit1(xs[1])
|
||||
output = self.skip_add.add(output, res)
|
||||
# output += res
|
||||
|
||||
output = self.resConfUnit2(output)
|
||||
|
||||
output = nn.functional.interpolate(
|
||||
output, scale_factor=2, mode="bilinear", align_corners=self.align_corners
|
||||
)
|
||||
|
||||
output = self.out_conv(output)
|
||||
|
||||
return output
|
||||
|
||||
@@ -0,0 +1,109 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.nn.functional as F
|
||||
|
||||
from .base_model import BaseModel
|
||||
from .blocks import (
|
||||
FeatureFusionBlock,
|
||||
FeatureFusionBlock_custom,
|
||||
Interpolate,
|
||||
_make_encoder,
|
||||
forward_vit,
|
||||
)
|
||||
|
||||
|
||||
def _make_fusion_block(features, use_bn):
|
||||
return FeatureFusionBlock_custom(
|
||||
features,
|
||||
nn.ReLU(False),
|
||||
deconv=False,
|
||||
bn=use_bn,
|
||||
expand=False,
|
||||
align_corners=True,
|
||||
)
|
||||
|
||||
|
||||
class DPT(BaseModel):
|
||||
def __init__(
|
||||
self,
|
||||
head,
|
||||
features=256,
|
||||
backbone="vitb_rn50_384",
|
||||
readout="project",
|
||||
channels_last=False,
|
||||
use_bn=False,
|
||||
):
|
||||
|
||||
super(DPT, self).__init__()
|
||||
|
||||
self.channels_last = channels_last
|
||||
|
||||
hooks = {
|
||||
"vitb_rn50_384": [0, 1, 8, 11],
|
||||
"vitb16_384": [2, 5, 8, 11],
|
||||
"vitl16_384": [5, 11, 17, 23],
|
||||
}
|
||||
|
||||
# Instantiate backbone and reassemble blocks
|
||||
self.pretrained, self.scratch = _make_encoder(
|
||||
backbone,
|
||||
features,
|
||||
False, # Set to true of you want to train from scratch, uses ImageNet weights
|
||||
groups=1,
|
||||
expand=False,
|
||||
exportable=False,
|
||||
hooks=hooks[backbone],
|
||||
use_readout=readout,
|
||||
)
|
||||
|
||||
self.scratch.refinenet1 = _make_fusion_block(features, use_bn)
|
||||
self.scratch.refinenet2 = _make_fusion_block(features, use_bn)
|
||||
self.scratch.refinenet3 = _make_fusion_block(features, use_bn)
|
||||
self.scratch.refinenet4 = _make_fusion_block(features, use_bn)
|
||||
|
||||
self.scratch.output_conv = head
|
||||
|
||||
|
||||
def forward(self, x):
|
||||
if self.channels_last == True:
|
||||
x.contiguous(memory_format=torch.channels_last)
|
||||
|
||||
layer_1, layer_2, layer_3, layer_4 = forward_vit(self.pretrained, x)
|
||||
|
||||
layer_1_rn = self.scratch.layer1_rn(layer_1)
|
||||
layer_2_rn = self.scratch.layer2_rn(layer_2)
|
||||
layer_3_rn = self.scratch.layer3_rn(layer_3)
|
||||
layer_4_rn = self.scratch.layer4_rn(layer_4)
|
||||
|
||||
path_4 = self.scratch.refinenet4(layer_4_rn)
|
||||
path_3 = self.scratch.refinenet3(path_4, layer_3_rn)
|
||||
path_2 = self.scratch.refinenet2(path_3, layer_2_rn)
|
||||
path_1 = self.scratch.refinenet1(path_2, layer_1_rn)
|
||||
|
||||
out = self.scratch.output_conv(path_1)
|
||||
|
||||
return out
|
||||
|
||||
|
||||
class DPTDepthModel(DPT):
|
||||
def __init__(self, path=None, non_negative=True, **kwargs):
|
||||
features = kwargs["features"] if "features" in kwargs else 256
|
||||
|
||||
head = nn.Sequential(
|
||||
nn.Conv2d(features, features // 2, kernel_size=3, stride=1, padding=1),
|
||||
Interpolate(scale_factor=2, mode="bilinear", align_corners=True),
|
||||
nn.Conv2d(features // 2, 32, kernel_size=3, stride=1, padding=1),
|
||||
nn.ReLU(True),
|
||||
nn.Conv2d(32, 1, kernel_size=1, stride=1, padding=0),
|
||||
nn.ReLU(True) if non_negative else nn.Identity(),
|
||||
nn.Identity(),
|
||||
)
|
||||
|
||||
super().__init__(head, **kwargs)
|
||||
|
||||
if path is not None:
|
||||
self.load(path)
|
||||
|
||||
def forward(self, x):
|
||||
return super().forward(x).squeeze(dim=1)
|
||||
|
||||
@@ -0,0 +1,76 @@
|
||||
"""MidashNet: Network for monocular depth estimation trained by mixing several datasets.
|
||||
This file contains code that is adapted from
|
||||
https://github.com/thomasjpfan/pytorch_refinenet/blob/master/pytorch_refinenet/refinenet/refinenet_4cascade.py
|
||||
"""
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
from .base_model import BaseModel
|
||||
from .blocks import FeatureFusionBlock, Interpolate, _make_encoder
|
||||
|
||||
|
||||
class MidasNet(BaseModel):
|
||||
"""Network for monocular depth estimation.
|
||||
"""
|
||||
|
||||
def __init__(self, path=None, features=256, non_negative=True):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
path (str, optional): Path to saved model. Defaults to None.
|
||||
features (int, optional): Number of features. Defaults to 256.
|
||||
backbone (str, optional): Backbone network for encoder. Defaults to resnet50
|
||||
"""
|
||||
print("Loading weights: ", path)
|
||||
|
||||
super(MidasNet, self).__init__()
|
||||
|
||||
use_pretrained = False if path is None else True
|
||||
|
||||
self.pretrained, self.scratch = _make_encoder(backbone="resnext101_wsl", features=features, use_pretrained=use_pretrained)
|
||||
|
||||
self.scratch.refinenet4 = FeatureFusionBlock(features)
|
||||
self.scratch.refinenet3 = FeatureFusionBlock(features)
|
||||
self.scratch.refinenet2 = FeatureFusionBlock(features)
|
||||
self.scratch.refinenet1 = FeatureFusionBlock(features)
|
||||
|
||||
self.scratch.output_conv = nn.Sequential(
|
||||
nn.Conv2d(features, 128, kernel_size=3, stride=1, padding=1),
|
||||
Interpolate(scale_factor=2, mode="bilinear"),
|
||||
nn.Conv2d(128, 32, kernel_size=3, stride=1, padding=1),
|
||||
nn.ReLU(True),
|
||||
nn.Conv2d(32, 1, kernel_size=1, stride=1, padding=0),
|
||||
nn.ReLU(True) if non_negative else nn.Identity(),
|
||||
)
|
||||
|
||||
if path:
|
||||
self.load(path)
|
||||
|
||||
def forward(self, x):
|
||||
"""Forward pass.
|
||||
|
||||
Args:
|
||||
x (tensor): input data (image)
|
||||
|
||||
Returns:
|
||||
tensor: depth
|
||||
"""
|
||||
|
||||
layer_1 = self.pretrained.layer1(x)
|
||||
layer_2 = self.pretrained.layer2(layer_1)
|
||||
layer_3 = self.pretrained.layer3(layer_2)
|
||||
layer_4 = self.pretrained.layer4(layer_3)
|
||||
|
||||
layer_1_rn = self.scratch.layer1_rn(layer_1)
|
||||
layer_2_rn = self.scratch.layer2_rn(layer_2)
|
||||
layer_3_rn = self.scratch.layer3_rn(layer_3)
|
||||
layer_4_rn = self.scratch.layer4_rn(layer_4)
|
||||
|
||||
path_4 = self.scratch.refinenet4(layer_4_rn)
|
||||
path_3 = self.scratch.refinenet3(path_4, layer_3_rn)
|
||||
path_2 = self.scratch.refinenet2(path_3, layer_2_rn)
|
||||
path_1 = self.scratch.refinenet1(path_2, layer_1_rn)
|
||||
|
||||
out = self.scratch.output_conv(path_1)
|
||||
|
||||
return torch.squeeze(out, dim=1)
|
||||
@@ -0,0 +1,128 @@
|
||||
"""MidashNet: Network for monocular depth estimation trained by mixing several datasets.
|
||||
This file contains code that is adapted from
|
||||
https://github.com/thomasjpfan/pytorch_refinenet/blob/master/pytorch_refinenet/refinenet/refinenet_4cascade.py
|
||||
"""
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
|
||||
from .base_model import BaseModel
|
||||
from .blocks import FeatureFusionBlock, FeatureFusionBlock_custom, Interpolate, _make_encoder
|
||||
|
||||
|
||||
class MidasNet_small(BaseModel):
|
||||
"""Network for monocular depth estimation.
|
||||
"""
|
||||
|
||||
def __init__(self, path=None, features=64, backbone="efficientnet_lite3", non_negative=True, exportable=True, channels_last=False, align_corners=True,
|
||||
blocks={'expand': True}):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
path (str, optional): Path to saved model. Defaults to None.
|
||||
features (int, optional): Number of features. Defaults to 256.
|
||||
backbone (str, optional): Backbone network for encoder. Defaults to resnet50
|
||||
"""
|
||||
print("Loading weights: ", path)
|
||||
|
||||
super(MidasNet_small, self).__init__()
|
||||
|
||||
use_pretrained = False if path else True
|
||||
|
||||
self.channels_last = channels_last
|
||||
self.blocks = blocks
|
||||
self.backbone = backbone
|
||||
|
||||
self.groups = 1
|
||||
|
||||
features1=features
|
||||
features2=features
|
||||
features3=features
|
||||
features4=features
|
||||
self.expand = False
|
||||
if "expand" in self.blocks and self.blocks['expand'] == True:
|
||||
self.expand = True
|
||||
features1=features
|
||||
features2=features*2
|
||||
features3=features*4
|
||||
features4=features*8
|
||||
|
||||
self.pretrained, self.scratch = _make_encoder(self.backbone, features, use_pretrained, groups=self.groups, expand=self.expand, exportable=exportable)
|
||||
|
||||
self.scratch.activation = nn.ReLU(False)
|
||||
|
||||
self.scratch.refinenet4 = FeatureFusionBlock_custom(features4, self.scratch.activation, deconv=False, bn=False, expand=self.expand, align_corners=align_corners)
|
||||
self.scratch.refinenet3 = FeatureFusionBlock_custom(features3, self.scratch.activation, deconv=False, bn=False, expand=self.expand, align_corners=align_corners)
|
||||
self.scratch.refinenet2 = FeatureFusionBlock_custom(features2, self.scratch.activation, deconv=False, bn=False, expand=self.expand, align_corners=align_corners)
|
||||
self.scratch.refinenet1 = FeatureFusionBlock_custom(features1, self.scratch.activation, deconv=False, bn=False, align_corners=align_corners)
|
||||
|
||||
|
||||
self.scratch.output_conv = nn.Sequential(
|
||||
nn.Conv2d(features, features//2, kernel_size=3, stride=1, padding=1, groups=self.groups),
|
||||
Interpolate(scale_factor=2, mode="bilinear"),
|
||||
nn.Conv2d(features//2, 32, kernel_size=3, stride=1, padding=1),
|
||||
self.scratch.activation,
|
||||
nn.Conv2d(32, 1, kernel_size=1, stride=1, padding=0),
|
||||
nn.ReLU(True) if non_negative else nn.Identity(),
|
||||
nn.Identity(),
|
||||
)
|
||||
|
||||
if path:
|
||||
self.load(path)
|
||||
|
||||
|
||||
def forward(self, x):
|
||||
"""Forward pass.
|
||||
|
||||
Args:
|
||||
x (tensor): input data (image)
|
||||
|
||||
Returns:
|
||||
tensor: depth
|
||||
"""
|
||||
if self.channels_last==True:
|
||||
print("self.channels_last = ", self.channels_last)
|
||||
x.contiguous(memory_format=torch.channels_last)
|
||||
|
||||
|
||||
layer_1 = self.pretrained.layer1(x)
|
||||
layer_2 = self.pretrained.layer2(layer_1)
|
||||
layer_3 = self.pretrained.layer3(layer_2)
|
||||
layer_4 = self.pretrained.layer4(layer_3)
|
||||
|
||||
layer_1_rn = self.scratch.layer1_rn(layer_1)
|
||||
layer_2_rn = self.scratch.layer2_rn(layer_2)
|
||||
layer_3_rn = self.scratch.layer3_rn(layer_3)
|
||||
layer_4_rn = self.scratch.layer4_rn(layer_4)
|
||||
|
||||
|
||||
path_4 = self.scratch.refinenet4(layer_4_rn)
|
||||
path_3 = self.scratch.refinenet3(path_4, layer_3_rn)
|
||||
path_2 = self.scratch.refinenet2(path_3, layer_2_rn)
|
||||
path_1 = self.scratch.refinenet1(path_2, layer_1_rn)
|
||||
|
||||
out = self.scratch.output_conv(path_1)
|
||||
|
||||
return torch.squeeze(out, dim=1)
|
||||
|
||||
|
||||
|
||||
def fuse_model(m):
|
||||
prev_previous_type = nn.Identity()
|
||||
prev_previous_name = ''
|
||||
previous_type = nn.Identity()
|
||||
previous_name = ''
|
||||
for name, module in m.named_modules():
|
||||
if prev_previous_type == nn.Conv2d and previous_type == nn.BatchNorm2d and type(module) == nn.ReLU:
|
||||
# print("FUSED ", prev_previous_name, previous_name, name)
|
||||
torch.quantization.fuse_modules(m, [prev_previous_name, previous_name, name], inplace=True)
|
||||
elif prev_previous_type == nn.Conv2d and previous_type == nn.BatchNorm2d:
|
||||
# print("FUSED ", prev_previous_name, previous_name)
|
||||
torch.quantization.fuse_modules(m, [prev_previous_name, previous_name], inplace=True)
|
||||
# elif previous_type == nn.Conv2d and type(module) == nn.ReLU:
|
||||
# print("FUSED ", previous_name, name)
|
||||
# torch.quantization.fuse_modules(m, [previous_name, name], inplace=True)
|
||||
|
||||
prev_previous_type = previous_type
|
||||
prev_previous_name = previous_name
|
||||
previous_type = type(module)
|
||||
previous_name = name
|
||||
@@ -0,0 +1,234 @@
|
||||
import numpy as np
|
||||
import cv2
|
||||
import math
|
||||
|
||||
|
||||
def apply_min_size(sample, size, image_interpolation_method=cv2.INTER_AREA):
|
||||
"""Rezise the sample to ensure the given size. Keeps aspect ratio.
|
||||
|
||||
Args:
|
||||
sample (dict): sample
|
||||
size (tuple): image size
|
||||
|
||||
Returns:
|
||||
tuple: new size
|
||||
"""
|
||||
shape = list(sample["disparity"].shape)
|
||||
|
||||
if shape[0] >= size[0] and shape[1] >= size[1]:
|
||||
return sample
|
||||
|
||||
scale = [0, 0]
|
||||
scale[0] = size[0] / shape[0]
|
||||
scale[1] = size[1] / shape[1]
|
||||
|
||||
scale = max(scale)
|
||||
|
||||
shape[0] = math.ceil(scale * shape[0])
|
||||
shape[1] = math.ceil(scale * shape[1])
|
||||
|
||||
# resize
|
||||
sample["image"] = cv2.resize(
|
||||
sample["image"], tuple(shape[::-1]), interpolation=image_interpolation_method
|
||||
)
|
||||
|
||||
sample["disparity"] = cv2.resize(
|
||||
sample["disparity"], tuple(shape[::-1]), interpolation=cv2.INTER_NEAREST
|
||||
)
|
||||
sample["mask"] = cv2.resize(
|
||||
sample["mask"].astype(np.float32),
|
||||
tuple(shape[::-1]),
|
||||
interpolation=cv2.INTER_NEAREST,
|
||||
)
|
||||
sample["mask"] = sample["mask"].astype(bool)
|
||||
|
||||
return tuple(shape)
|
||||
|
||||
|
||||
class Resize(object):
|
||||
"""Resize sample to given size (width, height).
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
width,
|
||||
height,
|
||||
resize_target=True,
|
||||
keep_aspect_ratio=False,
|
||||
ensure_multiple_of=1,
|
||||
resize_method="lower_bound",
|
||||
image_interpolation_method=cv2.INTER_AREA,
|
||||
):
|
||||
"""Init.
|
||||
|
||||
Args:
|
||||
width (int): desired output width
|
||||
height (int): desired output height
|
||||
resize_target (bool, optional):
|
||||
True: Resize the full sample (image, mask, target).
|
||||
False: Resize image only.
|
||||
Defaults to True.
|
||||
keep_aspect_ratio (bool, optional):
|
||||
True: Keep the aspect ratio of the input sample.
|
||||
Output sample might not have the given width and height, and
|
||||
resize behaviour depends on the parameter 'resize_method'.
|
||||
Defaults to False.
|
||||
ensure_multiple_of (int, optional):
|
||||
Output width and height is constrained to be multiple of this parameter.
|
||||
Defaults to 1.
|
||||
resize_method (str, optional):
|
||||
"lower_bound": Output will be at least as large as the given size.
|
||||
"upper_bound": Output will be at max as large as the given size. (Output size might be smaller than given size.)
|
||||
"minimal": Scale as least as possible. (Output size might be smaller than given size.)
|
||||
Defaults to "lower_bound".
|
||||
"""
|
||||
self.__width = width
|
||||
self.__height = height
|
||||
|
||||
self.__resize_target = resize_target
|
||||
self.__keep_aspect_ratio = keep_aspect_ratio
|
||||
self.__multiple_of = ensure_multiple_of
|
||||
self.__resize_method = resize_method
|
||||
self.__image_interpolation_method = image_interpolation_method
|
||||
|
||||
def constrain_to_multiple_of(self, x, min_val=0, max_val=None):
|
||||
y = (np.round(x / self.__multiple_of) * self.__multiple_of).astype(int)
|
||||
|
||||
if max_val is not None and y > max_val:
|
||||
y = (np.floor(x / self.__multiple_of) * self.__multiple_of).astype(int)
|
||||
|
||||
if y < min_val:
|
||||
y = (np.ceil(x / self.__multiple_of) * self.__multiple_of).astype(int)
|
||||
|
||||
return y
|
||||
|
||||
def get_size(self, width, height):
|
||||
# determine new height and width
|
||||
scale_height = self.__height / height
|
||||
scale_width = self.__width / width
|
||||
|
||||
if self.__keep_aspect_ratio:
|
||||
if self.__resize_method == "lower_bound":
|
||||
# scale such that output size is lower bound
|
||||
if scale_width > scale_height:
|
||||
# fit width
|
||||
scale_height = scale_width
|
||||
else:
|
||||
# fit height
|
||||
scale_width = scale_height
|
||||
elif self.__resize_method == "upper_bound":
|
||||
# scale such that output size is upper bound
|
||||
if scale_width < scale_height:
|
||||
# fit width
|
||||
scale_height = scale_width
|
||||
else:
|
||||
# fit height
|
||||
scale_width = scale_height
|
||||
elif self.__resize_method == "minimal":
|
||||
# scale as least as possbile
|
||||
if abs(1 - scale_width) < abs(1 - scale_height):
|
||||
# fit width
|
||||
scale_height = scale_width
|
||||
else:
|
||||
# fit height
|
||||
scale_width = scale_height
|
||||
else:
|
||||
raise ValueError(
|
||||
f"resize_method {self.__resize_method} not implemented"
|
||||
)
|
||||
|
||||
if self.__resize_method == "lower_bound":
|
||||
new_height = self.constrain_to_multiple_of(
|
||||
scale_height * height, min_val=self.__height
|
||||
)
|
||||
new_width = self.constrain_to_multiple_of(
|
||||
scale_width * width, min_val=self.__width
|
||||
)
|
||||
elif self.__resize_method == "upper_bound":
|
||||
new_height = self.constrain_to_multiple_of(
|
||||
scale_height * height, max_val=self.__height
|
||||
)
|
||||
new_width = self.constrain_to_multiple_of(
|
||||
scale_width * width, max_val=self.__width
|
||||
)
|
||||
elif self.__resize_method == "minimal":
|
||||
new_height = self.constrain_to_multiple_of(scale_height * height)
|
||||
new_width = self.constrain_to_multiple_of(scale_width * width)
|
||||
else:
|
||||
raise ValueError(f"resize_method {self.__resize_method} not implemented")
|
||||
|
||||
return (new_width, new_height)
|
||||
|
||||
def __call__(self, sample):
|
||||
width, height = self.get_size(
|
||||
sample["image"].shape[1], sample["image"].shape[0]
|
||||
)
|
||||
|
||||
# resize sample
|
||||
sample["image"] = cv2.resize(
|
||||
sample["image"],
|
||||
(width, height),
|
||||
interpolation=self.__image_interpolation_method,
|
||||
)
|
||||
|
||||
if self.__resize_target:
|
||||
if "disparity" in sample:
|
||||
sample["disparity"] = cv2.resize(
|
||||
sample["disparity"],
|
||||
(width, height),
|
||||
interpolation=cv2.INTER_NEAREST,
|
||||
)
|
||||
|
||||
if "depth" in sample:
|
||||
sample["depth"] = cv2.resize(
|
||||
sample["depth"], (width, height), interpolation=cv2.INTER_NEAREST
|
||||
)
|
||||
|
||||
sample["mask"] = cv2.resize(
|
||||
sample["mask"].astype(np.float32),
|
||||
(width, height),
|
||||
interpolation=cv2.INTER_NEAREST,
|
||||
)
|
||||
sample["mask"] = sample["mask"].astype(bool)
|
||||
|
||||
return sample
|
||||
|
||||
|
||||
class NormalizeImage(object):
|
||||
"""Normlize image by given mean and std.
|
||||
"""
|
||||
|
||||
def __init__(self, mean, std):
|
||||
self.__mean = mean
|
||||
self.__std = std
|
||||
|
||||
def __call__(self, sample):
|
||||
sample["image"] = (sample["image"] - self.__mean) / self.__std
|
||||
|
||||
return sample
|
||||
|
||||
|
||||
class PrepareForNet(object):
|
||||
"""Prepare sample for usage as network input.
|
||||
"""
|
||||
|
||||
def __init__(self):
|
||||
pass
|
||||
|
||||
def __call__(self, sample):
|
||||
image = np.transpose(sample["image"], (2, 0, 1))
|
||||
sample["image"] = np.ascontiguousarray(image).astype(np.float32)
|
||||
|
||||
if "mask" in sample:
|
||||
sample["mask"] = sample["mask"].astype(np.float32)
|
||||
sample["mask"] = np.ascontiguousarray(sample["mask"])
|
||||
|
||||
if "disparity" in sample:
|
||||
disparity = sample["disparity"].astype(np.float32)
|
||||
sample["disparity"] = np.ascontiguousarray(disparity)
|
||||
|
||||
if "depth" in sample:
|
||||
depth = sample["depth"].astype(np.float32)
|
||||
sample["depth"] = np.ascontiguousarray(depth)
|
||||
|
||||
return sample
|
||||
@@ -0,0 +1,491 @@
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import timm
|
||||
import types
|
||||
import math
|
||||
import torch.nn.functional as F
|
||||
|
||||
|
||||
class Slice(nn.Module):
|
||||
def __init__(self, start_index=1):
|
||||
super(Slice, self).__init__()
|
||||
self.start_index = start_index
|
||||
|
||||
def forward(self, x):
|
||||
return x[:, self.start_index :]
|
||||
|
||||
|
||||
class AddReadout(nn.Module):
|
||||
def __init__(self, start_index=1):
|
||||
super(AddReadout, self).__init__()
|
||||
self.start_index = start_index
|
||||
|
||||
def forward(self, x):
|
||||
if self.start_index == 2:
|
||||
readout = (x[:, 0] + x[:, 1]) / 2
|
||||
else:
|
||||
readout = x[:, 0]
|
||||
return x[:, self.start_index :] + readout.unsqueeze(1)
|
||||
|
||||
|
||||
class ProjectReadout(nn.Module):
|
||||
def __init__(self, in_features, start_index=1):
|
||||
super(ProjectReadout, self).__init__()
|
||||
self.start_index = start_index
|
||||
|
||||
self.project = nn.Sequential(nn.Linear(2 * in_features, in_features), nn.GELU())
|
||||
|
||||
def forward(self, x):
|
||||
readout = x[:, 0].unsqueeze(1).expand_as(x[:, self.start_index :])
|
||||
features = torch.cat((x[:, self.start_index :], readout), -1)
|
||||
|
||||
return self.project(features)
|
||||
|
||||
|
||||
class Transpose(nn.Module):
|
||||
def __init__(self, dim0, dim1):
|
||||
super(Transpose, self).__init__()
|
||||
self.dim0 = dim0
|
||||
self.dim1 = dim1
|
||||
|
||||
def forward(self, x):
|
||||
x = x.transpose(self.dim0, self.dim1)
|
||||
return x
|
||||
|
||||
|
||||
def forward_vit(pretrained, x):
|
||||
b, c, h, w = x.shape
|
||||
|
||||
glob = pretrained.model.forward_flex(x)
|
||||
|
||||
layer_1 = pretrained.activations["1"]
|
||||
layer_2 = pretrained.activations["2"]
|
||||
layer_3 = pretrained.activations["3"]
|
||||
layer_4 = pretrained.activations["4"]
|
||||
|
||||
layer_1 = pretrained.act_postprocess1[0:2](layer_1)
|
||||
layer_2 = pretrained.act_postprocess2[0:2](layer_2)
|
||||
layer_3 = pretrained.act_postprocess3[0:2](layer_3)
|
||||
layer_4 = pretrained.act_postprocess4[0:2](layer_4)
|
||||
|
||||
unflatten = nn.Sequential(
|
||||
nn.Unflatten(
|
||||
2,
|
||||
torch.Size(
|
||||
[
|
||||
h // pretrained.model.patch_size[1],
|
||||
w // pretrained.model.patch_size[0],
|
||||
]
|
||||
),
|
||||
)
|
||||
)
|
||||
|
||||
if layer_1.ndim == 3:
|
||||
layer_1 = unflatten(layer_1)
|
||||
if layer_2.ndim == 3:
|
||||
layer_2 = unflatten(layer_2)
|
||||
if layer_3.ndim == 3:
|
||||
layer_3 = unflatten(layer_3)
|
||||
if layer_4.ndim == 3:
|
||||
layer_4 = unflatten(layer_4)
|
||||
|
||||
layer_1 = pretrained.act_postprocess1[3 : len(pretrained.act_postprocess1)](layer_1)
|
||||
layer_2 = pretrained.act_postprocess2[3 : len(pretrained.act_postprocess2)](layer_2)
|
||||
layer_3 = pretrained.act_postprocess3[3 : len(pretrained.act_postprocess3)](layer_3)
|
||||
layer_4 = pretrained.act_postprocess4[3 : len(pretrained.act_postprocess4)](layer_4)
|
||||
|
||||
return layer_1, layer_2, layer_3, layer_4
|
||||
|
||||
|
||||
def _resize_pos_embed(self, posemb, gs_h, gs_w):
|
||||
posemb_tok, posemb_grid = (
|
||||
posemb[:, : self.start_index],
|
||||
posemb[0, self.start_index :],
|
||||
)
|
||||
|
||||
gs_old = int(math.sqrt(len(posemb_grid)))
|
||||
|
||||
posemb_grid = posemb_grid.reshape(1, gs_old, gs_old, -1).permute(0, 3, 1, 2)
|
||||
posemb_grid = F.interpolate(posemb_grid, size=(gs_h, gs_w), mode="bilinear")
|
||||
posemb_grid = posemb_grid.permute(0, 2, 3, 1).reshape(1, gs_h * gs_w, -1)
|
||||
|
||||
posemb = torch.cat([posemb_tok, posemb_grid], dim=1)
|
||||
|
||||
return posemb
|
||||
|
||||
|
||||
def forward_flex(self, x):
|
||||
b, c, h, w = x.shape
|
||||
|
||||
pos_embed = self._resize_pos_embed(
|
||||
self.pos_embed, h // self.patch_size[1], w // self.patch_size[0]
|
||||
)
|
||||
|
||||
B = x.shape[0]
|
||||
|
||||
if hasattr(self.patch_embed, "backbone"):
|
||||
x = self.patch_embed.backbone(x)
|
||||
if isinstance(x, (list, tuple)):
|
||||
x = x[-1] # last feature if backbone outputs list/tuple of features
|
||||
|
||||
x = self.patch_embed.proj(x).flatten(2).transpose(1, 2)
|
||||
|
||||
if getattr(self, "dist_token", None) is not None:
|
||||
cls_tokens = self.cls_token.expand(
|
||||
B, -1, -1
|
||||
) # stole cls_tokens impl from Phil Wang, thanks
|
||||
dist_token = self.dist_token.expand(B, -1, -1)
|
||||
x = torch.cat((cls_tokens, dist_token, x), dim=1)
|
||||
else:
|
||||
cls_tokens = self.cls_token.expand(
|
||||
B, -1, -1
|
||||
) # stole cls_tokens impl from Phil Wang, thanks
|
||||
x = torch.cat((cls_tokens, x), dim=1)
|
||||
|
||||
x = x + pos_embed
|
||||
x = self.pos_drop(x)
|
||||
|
||||
for blk in self.blocks:
|
||||
x = blk(x)
|
||||
|
||||
x = self.norm(x)
|
||||
|
||||
return x
|
||||
|
||||
|
||||
activations = {}
|
||||
|
||||
|
||||
def get_activation(name):
|
||||
def hook(model, input, output):
|
||||
activations[name] = output
|
||||
|
||||
return hook
|
||||
|
||||
|
||||
def get_readout_oper(vit_features, features, use_readout, start_index=1):
|
||||
if use_readout == "ignore":
|
||||
readout_oper = [Slice(start_index)] * len(features)
|
||||
elif use_readout == "add":
|
||||
readout_oper = [AddReadout(start_index)] * len(features)
|
||||
elif use_readout == "project":
|
||||
readout_oper = [
|
||||
ProjectReadout(vit_features, start_index) for out_feat in features
|
||||
]
|
||||
else:
|
||||
assert (
|
||||
False
|
||||
), "wrong operation for readout token, use_readout can be 'ignore', 'add', or 'project'"
|
||||
|
||||
return readout_oper
|
||||
|
||||
|
||||
def _make_vit_b16_backbone(
|
||||
model,
|
||||
features=[96, 192, 384, 768],
|
||||
size=[384, 384],
|
||||
hooks=[2, 5, 8, 11],
|
||||
vit_features=768,
|
||||
use_readout="ignore",
|
||||
start_index=1,
|
||||
):
|
||||
pretrained = nn.Module()
|
||||
|
||||
pretrained.model = model
|
||||
pretrained.model.blocks[hooks[0]].register_forward_hook(get_activation("1"))
|
||||
pretrained.model.blocks[hooks[1]].register_forward_hook(get_activation("2"))
|
||||
pretrained.model.blocks[hooks[2]].register_forward_hook(get_activation("3"))
|
||||
pretrained.model.blocks[hooks[3]].register_forward_hook(get_activation("4"))
|
||||
|
||||
pretrained.activations = activations
|
||||
|
||||
readout_oper = get_readout_oper(vit_features, features, use_readout, start_index)
|
||||
|
||||
# 32, 48, 136, 384
|
||||
pretrained.act_postprocess1 = nn.Sequential(
|
||||
readout_oper[0],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[0],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
nn.ConvTranspose2d(
|
||||
in_channels=features[0],
|
||||
out_channels=features[0],
|
||||
kernel_size=4,
|
||||
stride=4,
|
||||
padding=0,
|
||||
bias=True,
|
||||
dilation=1,
|
||||
groups=1,
|
||||
),
|
||||
)
|
||||
|
||||
pretrained.act_postprocess2 = nn.Sequential(
|
||||
readout_oper[1],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[1],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
nn.ConvTranspose2d(
|
||||
in_channels=features[1],
|
||||
out_channels=features[1],
|
||||
kernel_size=2,
|
||||
stride=2,
|
||||
padding=0,
|
||||
bias=True,
|
||||
dilation=1,
|
||||
groups=1,
|
||||
),
|
||||
)
|
||||
|
||||
pretrained.act_postprocess3 = nn.Sequential(
|
||||
readout_oper[2],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[2],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
)
|
||||
|
||||
pretrained.act_postprocess4 = nn.Sequential(
|
||||
readout_oper[3],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[3],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
nn.Conv2d(
|
||||
in_channels=features[3],
|
||||
out_channels=features[3],
|
||||
kernel_size=3,
|
||||
stride=2,
|
||||
padding=1,
|
||||
),
|
||||
)
|
||||
|
||||
pretrained.model.start_index = start_index
|
||||
pretrained.model.patch_size = [16, 16]
|
||||
|
||||
# We inject this function into the VisionTransformer instances so that
|
||||
# we can use it with interpolated position embeddings without modifying the library source.
|
||||
pretrained.model.forward_flex = types.MethodType(forward_flex, pretrained.model)
|
||||
pretrained.model._resize_pos_embed = types.MethodType(
|
||||
_resize_pos_embed, pretrained.model
|
||||
)
|
||||
|
||||
return pretrained
|
||||
|
||||
|
||||
def _make_pretrained_vitl16_384(pretrained, use_readout="ignore", hooks=None):
|
||||
model = timm.create_model("vit_large_patch16_384", pretrained=pretrained)
|
||||
|
||||
hooks = [5, 11, 17, 23] if hooks == None else hooks
|
||||
return _make_vit_b16_backbone(
|
||||
model,
|
||||
features=[256, 512, 1024, 1024],
|
||||
hooks=hooks,
|
||||
vit_features=1024,
|
||||
use_readout=use_readout,
|
||||
)
|
||||
|
||||
|
||||
def _make_pretrained_vitb16_384(pretrained, use_readout="ignore", hooks=None):
|
||||
model = timm.create_model("vit_base_patch16_384", pretrained=pretrained)
|
||||
|
||||
hooks = [2, 5, 8, 11] if hooks == None else hooks
|
||||
return _make_vit_b16_backbone(
|
||||
model, features=[96, 192, 384, 768], hooks=hooks, use_readout=use_readout
|
||||
)
|
||||
|
||||
|
||||
def _make_pretrained_deitb16_384(pretrained, use_readout="ignore", hooks=None):
|
||||
model = timm.create_model("vit_deit_base_patch16_384", pretrained=pretrained)
|
||||
|
||||
hooks = [2, 5, 8, 11] if hooks == None else hooks
|
||||
return _make_vit_b16_backbone(
|
||||
model, features=[96, 192, 384, 768], hooks=hooks, use_readout=use_readout
|
||||
)
|
||||
|
||||
|
||||
def _make_pretrained_deitb16_distil_384(pretrained, use_readout="ignore", hooks=None):
|
||||
model = timm.create_model(
|
||||
"vit_deit_base_distilled_patch16_384", pretrained=pretrained
|
||||
)
|
||||
|
||||
hooks = [2, 5, 8, 11] if hooks == None else hooks
|
||||
return _make_vit_b16_backbone(
|
||||
model,
|
||||
features=[96, 192, 384, 768],
|
||||
hooks=hooks,
|
||||
use_readout=use_readout,
|
||||
start_index=2,
|
||||
)
|
||||
|
||||
|
||||
def _make_vit_b_rn50_backbone(
|
||||
model,
|
||||
features=[256, 512, 768, 768],
|
||||
size=[384, 384],
|
||||
hooks=[0, 1, 8, 11],
|
||||
vit_features=768,
|
||||
use_vit_only=False,
|
||||
use_readout="ignore",
|
||||
start_index=1,
|
||||
):
|
||||
pretrained = nn.Module()
|
||||
|
||||
pretrained.model = model
|
||||
|
||||
if use_vit_only == True:
|
||||
pretrained.model.blocks[hooks[0]].register_forward_hook(get_activation("1"))
|
||||
pretrained.model.blocks[hooks[1]].register_forward_hook(get_activation("2"))
|
||||
else:
|
||||
pretrained.model.patch_embed.backbone.stages[0].register_forward_hook(
|
||||
get_activation("1")
|
||||
)
|
||||
pretrained.model.patch_embed.backbone.stages[1].register_forward_hook(
|
||||
get_activation("2")
|
||||
)
|
||||
|
||||
pretrained.model.blocks[hooks[2]].register_forward_hook(get_activation("3"))
|
||||
pretrained.model.blocks[hooks[3]].register_forward_hook(get_activation("4"))
|
||||
|
||||
pretrained.activations = activations
|
||||
|
||||
readout_oper = get_readout_oper(vit_features, features, use_readout, start_index)
|
||||
|
||||
if use_vit_only == True:
|
||||
pretrained.act_postprocess1 = nn.Sequential(
|
||||
readout_oper[0],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[0],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
nn.ConvTranspose2d(
|
||||
in_channels=features[0],
|
||||
out_channels=features[0],
|
||||
kernel_size=4,
|
||||
stride=4,
|
||||
padding=0,
|
||||
bias=True,
|
||||
dilation=1,
|
||||
groups=1,
|
||||
),
|
||||
)
|
||||
|
||||
pretrained.act_postprocess2 = nn.Sequential(
|
||||
readout_oper[1],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[1],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
nn.ConvTranspose2d(
|
||||
in_channels=features[1],
|
||||
out_channels=features[1],
|
||||
kernel_size=2,
|
||||
stride=2,
|
||||
padding=0,
|
||||
bias=True,
|
||||
dilation=1,
|
||||
groups=1,
|
||||
),
|
||||
)
|
||||
else:
|
||||
pretrained.act_postprocess1 = nn.Sequential(
|
||||
nn.Identity(), nn.Identity(), nn.Identity()
|
||||
)
|
||||
pretrained.act_postprocess2 = nn.Sequential(
|
||||
nn.Identity(), nn.Identity(), nn.Identity()
|
||||
)
|
||||
|
||||
pretrained.act_postprocess3 = nn.Sequential(
|
||||
readout_oper[2],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[2],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
)
|
||||
|
||||
pretrained.act_postprocess4 = nn.Sequential(
|
||||
readout_oper[3],
|
||||
Transpose(1, 2),
|
||||
nn.Unflatten(2, torch.Size([size[0] // 16, size[1] // 16])),
|
||||
nn.Conv2d(
|
||||
in_channels=vit_features,
|
||||
out_channels=features[3],
|
||||
kernel_size=1,
|
||||
stride=1,
|
||||
padding=0,
|
||||
),
|
||||
nn.Conv2d(
|
||||
in_channels=features[3],
|
||||
out_channels=features[3],
|
||||
kernel_size=3,
|
||||
stride=2,
|
||||
padding=1,
|
||||
),
|
||||
)
|
||||
|
||||
pretrained.model.start_index = start_index
|
||||
pretrained.model.patch_size = [16, 16]
|
||||
|
||||
# We inject this function into the VisionTransformer instances so that
|
||||
# we can use it with interpolated position embeddings without modifying the library source.
|
||||
pretrained.model.forward_flex = types.MethodType(forward_flex, pretrained.model)
|
||||
|
||||
# We inject this function into the VisionTransformer instances so that
|
||||
# we can use it with interpolated position embeddings without modifying the library source.
|
||||
pretrained.model._resize_pos_embed = types.MethodType(
|
||||
_resize_pos_embed, pretrained.model
|
||||
)
|
||||
|
||||
return pretrained
|
||||
|
||||
|
||||
def _make_pretrained_vitb_rn50_384(
|
||||
pretrained, use_readout="ignore", hooks=None, use_vit_only=False
|
||||
):
|
||||
model = timm.create_model("vit_base_resnet50_384", pretrained=pretrained)
|
||||
|
||||
hooks = [0, 1, 8, 11] if hooks == None else hooks
|
||||
return _make_vit_b_rn50_backbone(
|
||||
model,
|
||||
features=[256, 512, 768, 768],
|
||||
size=[384, 384],
|
||||
hooks=hooks,
|
||||
use_vit_only=use_vit_only,
|
||||
use_readout=use_readout,
|
||||
)
|
||||
189
extensions-builtin/sd_forge_controlnet/annotator/midas/utils.py
Normal file
189
extensions-builtin/sd_forge_controlnet/annotator/midas/utils.py
Normal file
@@ -0,0 +1,189 @@
|
||||
"""Utils for monoDepth."""
|
||||
import sys
|
||||
import re
|
||||
import numpy as np
|
||||
import cv2
|
||||
import torch
|
||||
|
||||
|
||||
def read_pfm(path):
|
||||
"""Read pfm file.
|
||||
|
||||
Args:
|
||||
path (str): path to file
|
||||
|
||||
Returns:
|
||||
tuple: (data, scale)
|
||||
"""
|
||||
with open(path, "rb") as file:
|
||||
|
||||
color = None
|
||||
width = None
|
||||
height = None
|
||||
scale = None
|
||||
endian = None
|
||||
|
||||
header = file.readline().rstrip()
|
||||
if header.decode("ascii") == "PF":
|
||||
color = True
|
||||
elif header.decode("ascii") == "Pf":
|
||||
color = False
|
||||
else:
|
||||
raise Exception("Not a PFM file: " + path)
|
||||
|
||||
dim_match = re.match(r"^(\d+)\s(\d+)\s$", file.readline().decode("ascii"))
|
||||
if dim_match:
|
||||
width, height = list(map(int, dim_match.groups()))
|
||||
else:
|
||||
raise Exception("Malformed PFM header.")
|
||||
|
||||
scale = float(file.readline().decode("ascii").rstrip())
|
||||
if scale < 0:
|
||||
# little-endian
|
||||
endian = "<"
|
||||
scale = -scale
|
||||
else:
|
||||
# big-endian
|
||||
endian = ">"
|
||||
|
||||
data = np.fromfile(file, endian + "f")
|
||||
shape = (height, width, 3) if color else (height, width)
|
||||
|
||||
data = np.reshape(data, shape)
|
||||
data = np.flipud(data)
|
||||
|
||||
return data, scale
|
||||
|
||||
|
||||
def write_pfm(path, image, scale=1):
|
||||
"""Write pfm file.
|
||||
|
||||
Args:
|
||||
path (str): pathto file
|
||||
image (array): data
|
||||
scale (int, optional): Scale. Defaults to 1.
|
||||
"""
|
||||
|
||||
with open(path, "wb") as file:
|
||||
color = None
|
||||
|
||||
if image.dtype.name != "float32":
|
||||
raise Exception("Image dtype must be float32.")
|
||||
|
||||
image = np.flipud(image)
|
||||
|
||||
if len(image.shape) == 3 and image.shape[2] == 3: # color image
|
||||
color = True
|
||||
elif (
|
||||
len(image.shape) == 2 or len(image.shape) == 3 and image.shape[2] == 1
|
||||
): # greyscale
|
||||
color = False
|
||||
else:
|
||||
raise Exception("Image must have H x W x 3, H x W x 1 or H x W dimensions.")
|
||||
|
||||
file.write("PF\n" if color else "Pf\n".encode())
|
||||
file.write("%d %d\n".encode() % (image.shape[1], image.shape[0]))
|
||||
|
||||
endian = image.dtype.byteorder
|
||||
|
||||
if endian == "<" or endian == "=" and sys.byteorder == "little":
|
||||
scale = -scale
|
||||
|
||||
file.write("%f\n".encode() % scale)
|
||||
|
||||
image.tofile(file)
|
||||
|
||||
|
||||
def read_image(path):
|
||||
"""Read image and output RGB image (0-1).
|
||||
|
||||
Args:
|
||||
path (str): path to file
|
||||
|
||||
Returns:
|
||||
array: RGB image (0-1)
|
||||
"""
|
||||
img = cv2.imread(path)
|
||||
|
||||
if img.ndim == 2:
|
||||
img = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
|
||||
|
||||
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) / 255.0
|
||||
|
||||
return img
|
||||
|
||||
|
||||
def resize_image(img):
|
||||
"""Resize image and make it fit for network.
|
||||
|
||||
Args:
|
||||
img (array): image
|
||||
|
||||
Returns:
|
||||
tensor: data ready for network
|
||||
"""
|
||||
height_orig = img.shape[0]
|
||||
width_orig = img.shape[1]
|
||||
|
||||
if width_orig > height_orig:
|
||||
scale = width_orig / 384
|
||||
else:
|
||||
scale = height_orig / 384
|
||||
|
||||
height = (np.ceil(height_orig / scale / 32) * 32).astype(int)
|
||||
width = (np.ceil(width_orig / scale / 32) * 32).astype(int)
|
||||
|
||||
img_resized = cv2.resize(img, (width, height), interpolation=cv2.INTER_AREA)
|
||||
|
||||
img_resized = (
|
||||
torch.from_numpy(np.transpose(img_resized, (2, 0, 1))).contiguous().float()
|
||||
)
|
||||
img_resized = img_resized.unsqueeze(0)
|
||||
|
||||
return img_resized
|
||||
|
||||
|
||||
def resize_depth(depth, width, height):
|
||||
"""Resize depth map and bring to CPU (numpy).
|
||||
|
||||
Args:
|
||||
depth (tensor): depth
|
||||
width (int): image width
|
||||
height (int): image height
|
||||
|
||||
Returns:
|
||||
array: processed depth
|
||||
"""
|
||||
depth = torch.squeeze(depth[0, :, :, :]).to("cpu")
|
||||
|
||||
depth_resized = cv2.resize(
|
||||
depth.numpy(), (width, height), interpolation=cv2.INTER_CUBIC
|
||||
)
|
||||
|
||||
return depth_resized
|
||||
|
||||
def write_depth(path, depth, bits=1):
|
||||
"""Write depth map to pfm and png file.
|
||||
|
||||
Args:
|
||||
path (str): filepath without extension
|
||||
depth (array): depth
|
||||
"""
|
||||
write_pfm(path + ".pfm", depth.astype(np.float32))
|
||||
|
||||
depth_min = depth.min()
|
||||
depth_max = depth.max()
|
||||
|
||||
max_val = (2**(8*bits))-1
|
||||
|
||||
if depth_max - depth_min > np.finfo("float").eps:
|
||||
out = max_val * (depth - depth_min) / (depth_max - depth_min)
|
||||
else:
|
||||
out = np.zeros(depth.shape, dtype=depth.type)
|
||||
|
||||
if bits == 1:
|
||||
cv2.imwrite(path + ".png", out.astype("uint8"))
|
||||
elif bits == 2:
|
||||
cv2.imwrite(path + ".png", out.astype("uint16"))
|
||||
|
||||
return
|
||||
201
extensions-builtin/sd_forge_controlnet/annotator/mlsd/LICENSE
Normal file
201
extensions-builtin/sd_forge_controlnet/annotator/mlsd/LICENSE
Normal file
@@ -0,0 +1,201 @@
|
||||
Apache License
|
||||
Version 2.0, January 2004
|
||||
http://www.apache.org/licenses/
|
||||
|
||||
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
|
||||
|
||||
1. Definitions.
|
||||
|
||||
"License" shall mean the terms and conditions for use, reproduction,
|
||||
and distribution as defined by Sections 1 through 9 of this document.
|
||||
|
||||
"Licensor" shall mean the copyright owner or entity authorized by
|
||||
the copyright owner that is granting the License.
|
||||
|
||||
"Legal Entity" shall mean the union of the acting entity and all
|
||||
other entities that control, are controlled by, or are under common
|
||||
control with that entity. For the purposes of this definition,
|
||||
"control" means (i) the power, direct or indirect, to cause the
|
||||
direction or management of such entity, whether by contract or
|
||||
otherwise, or (ii) ownership of fifty percent (50%) or more of the
|
||||
outstanding shares, or (iii) beneficial ownership of such entity.
|
||||
|
||||
"You" (or "Your") shall mean an individual or Legal Entity
|
||||
exercising permissions granted by this License.
|
||||
|
||||
"Source" form shall mean the preferred form for making modifications,
|
||||
including but not limited to software source code, documentation
|
||||
source, and configuration files.
|
||||
|
||||
"Object" form shall mean any form resulting from mechanical
|
||||
transformation or translation of a Source form, including but
|
||||
not limited to compiled object code, generated documentation,
|
||||
and conversions to other media types.
|
||||
|
||||
"Work" shall mean the work of authorship, whether in Source or
|
||||
Object form, made available under the License, as indicated by a
|
||||
copyright notice that is included in or attached to the work
|
||||
(an example is provided in the Appendix below).
|
||||
|
||||
"Derivative Works" shall mean any work, whether in Source or Object
|
||||
form, that is based on (or derived from) the Work and for which the
|
||||
editorial revisions, annotations, elaborations, or other modifications
|
||||
represent, as a whole, an original work of authorship. For the purposes
|
||||
of this License, Derivative Works shall not include works that remain
|
||||
separable from, or merely link (or bind by name) to the interfaces of,
|
||||
the Work and Derivative Works thereof.
|
||||
|
||||
"Contribution" shall mean any work of authorship, including
|
||||
the original version of the Work and any modifications or additions
|
||||
to that Work or Derivative Works thereof, that is intentionally
|
||||
submitted to Licensor for inclusion in the Work by the copyright owner
|
||||
or by an individual or Legal Entity authorized to submit on behalf of
|
||||
the copyright owner. For the purposes of this definition, "submitted"
|
||||
means any form of electronic, verbal, or written communication sent
|
||||
to the Licensor or its representatives, including but not limited to
|
||||
communication on electronic mailing lists, source code control systems,
|
||||
and issue tracking systems that are managed by, or on behalf of, the
|
||||
Licensor for the purpose of discussing and improving the Work, but
|
||||
excluding communication that is conspicuously marked or otherwise
|
||||
designated in writing by the copyright owner as "Not a Contribution."
|
||||
|
||||
"Contributor" shall mean Licensor and any individual or Legal Entity
|
||||
on behalf of whom a Contribution has been received by Licensor and
|
||||
subsequently incorporated within the Work.
|
||||
|
||||
2. Grant of Copyright License. Subject to the terms and conditions of
|
||||
this License, each Contributor hereby grants to You a perpetual,
|
||||
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
||||
copyright license to reproduce, prepare Derivative Works of,
|
||||
publicly display, publicly perform, sublicense, and distribute the
|
||||
Work and such Derivative Works in Source or Object form.
|
||||
|
||||
3. Grant of Patent License. Subject to the terms and conditions of
|
||||
this License, each Contributor hereby grants to You a perpetual,
|
||||
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
||||
(except as stated in this section) patent license to make, have made,
|
||||
use, offer to sell, sell, import, and otherwise transfer the Work,
|
||||
where such license applies only to those patent claims licensable
|
||||
by such Contributor that are necessarily infringed by their
|
||||
Contribution(s) alone or by combination of their Contribution(s)
|
||||
with the Work to which such Contribution(s) was submitted. If You
|
||||
institute patent litigation against any entity (including a
|
||||
cross-claim or counterclaim in a lawsuit) alleging that the Work
|
||||
or a Contribution incorporated within the Work constitutes direct
|
||||
or contributory patent infringement, then any patent licenses
|
||||
granted to You under this License for that Work shall terminate
|
||||
as of the date such litigation is filed.
|
||||
|
||||
4. Redistribution. You may reproduce and distribute copies of the
|
||||
Work or Derivative Works thereof in any medium, with or without
|
||||
modifications, and in Source or Object form, provided that You
|
||||
meet the following conditions:
|
||||
|
||||
(a) You must give any other recipients of the Work or
|
||||
Derivative Works a copy of this License; and
|
||||
|
||||
(b) You must cause any modified files to carry prominent notices
|
||||
stating that You changed the files; and
|
||||
|
||||
(c) You must retain, in the Source form of any Derivative Works
|
||||
that You distribute, all copyright, patent, trademark, and
|
||||
attribution notices from the Source form of the Work,
|
||||
excluding those notices that do not pertain to any part of
|
||||
the Derivative Works; and
|
||||
|
||||
(d) If the Work includes a "NOTICE" text file as part of its
|
||||
distribution, then any Derivative Works that You distribute must
|
||||
include a readable copy of the attribution notices contained
|
||||
within such NOTICE file, excluding those notices that do not
|
||||
pertain to any part of the Derivative Works, in at least one
|
||||
of the following places: within a NOTICE text file distributed
|
||||
as part of the Derivative Works; within the Source form or
|
||||
documentation, if provided along with the Derivative Works; or,
|
||||
within a display generated by the Derivative Works, if and
|
||||
wherever such third-party notices normally appear. The contents
|
||||
of the NOTICE file are for informational purposes only and
|
||||
do not modify the License. You may add Your own attribution
|
||||
notices within Derivative Works that You distribute, alongside
|
||||
or as an addendum to the NOTICE text from the Work, provided
|
||||
that such additional attribution notices cannot be construed
|
||||
as modifying the License.
|
||||
|
||||
You may add Your own copyright statement to Your modifications and
|
||||
may provide additional or different license terms and conditions
|
||||
for use, reproduction, or distribution of Your modifications, or
|
||||
for any such Derivative Works as a whole, provided Your use,
|
||||
reproduction, and distribution of the Work otherwise complies with
|
||||
the conditions stated in this License.
|
||||
|
||||
5. Submission of Contributions. Unless You explicitly state otherwise,
|
||||
any Contribution intentionally submitted for inclusion in the Work
|
||||
by You to the Licensor shall be under the terms and conditions of
|
||||
this License, without any additional terms or conditions.
|
||||
Notwithstanding the above, nothing herein shall supersede or modify
|
||||
the terms of any separate license agreement you may have executed
|
||||
with Licensor regarding such Contributions.
|
||||
|
||||
6. Trademarks. This License does not grant permission to use the trade
|
||||
names, trademarks, service marks, or product names of the Licensor,
|
||||
except as required for reasonable and customary use in describing the
|
||||
origin of the Work and reproducing the content of the NOTICE file.
|
||||
|
||||
7. Disclaimer of Warranty. Unless required by applicable law or
|
||||
agreed to in writing, Licensor provides the Work (and each
|
||||
Contributor provides its Contributions) on an "AS IS" BASIS,
|
||||
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
|
||||
implied, including, without limitation, any warranties or conditions
|
||||
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
|
||||
PARTICULAR PURPOSE. You are solely responsible for determining the
|
||||
appropriateness of using or redistributing the Work and assume any
|
||||
risks associated with Your exercise of permissions under this License.
|
||||
|
||||
8. Limitation of Liability. In no event and under no legal theory,
|
||||
whether in tort (including negligence), contract, or otherwise,
|
||||
unless required by applicable law (such as deliberate and grossly
|
||||
negligent acts) or agreed to in writing, shall any Contributor be
|
||||
liable to You for damages, including any direct, indirect, special,
|
||||
incidental, or consequential damages of any character arising as a
|
||||
result of this License or out of the use or inability to use the
|
||||
Work (including but not limited to damages for loss of goodwill,
|
||||
work stoppage, computer failure or malfunction, or any and all
|
||||
other commercial damages or losses), even if such Contributor
|
||||
has been advised of the possibility of such damages.
|
||||
|
||||
9. Accepting Warranty or Additional Liability. While redistributing
|
||||
the Work or Derivative Works thereof, You may choose to offer,
|
||||
and charge a fee for, acceptance of support, warranty, indemnity,
|
||||
or other liability obligations and/or rights consistent with this
|
||||
License. However, in accepting such obligations, You may act only
|
||||
on Your own behalf and on Your sole responsibility, not on behalf
|
||||
of any other Contributor, and only if You agree to indemnify,
|
||||
defend, and hold each Contributor harmless for any liability
|
||||
incurred by, or claims asserted against, such Contributor by reason
|
||||
of your accepting any such warranty or additional liability.
|
||||
|
||||
END OF TERMS AND CONDITIONS
|
||||
|
||||
APPENDIX: How to apply the Apache License to your work.
|
||||
|
||||
To apply the Apache License to your work, attach the following
|
||||
boilerplate notice, with the fields enclosed by brackets "{}"
|
||||
replaced with your own identifying information. (Don't include
|
||||
the brackets!) The text should be enclosed in the appropriate
|
||||
comment syntax for the file format. We also recommend that a
|
||||
file or class name and description of purpose be included on the
|
||||
same "printed page" as the copyright notice for easier
|
||||
identification within third-party archives.
|
||||
|
||||
Copyright 2021-present NAVER Corp.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License");
|
||||
you may not use this file except in compliance with the License.
|
||||
You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software
|
||||
distributed under the License is distributed on an "AS IS" BASIS,
|
||||
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
See the License for the specific language governing permissions and
|
||||
limitations under the License.
|
||||
@@ -0,0 +1,49 @@
|
||||
import cv2
|
||||
import numpy as np
|
||||
import torch
|
||||
import os
|
||||
|
||||
from einops import rearrange
|
||||
from .models.mbv2_mlsd_tiny import MobileV2_MLSD_Tiny
|
||||
from .models.mbv2_mlsd_large import MobileV2_MLSD_Large
|
||||
from .utils import pred_lines
|
||||
from modules import devices
|
||||
from annotator.annotator_path import models_path
|
||||
|
||||
mlsdmodel = None
|
||||
remote_model_path = "https://huggingface.co/lllyasviel/ControlNet/resolve/main/annotator/ckpts/mlsd_large_512_fp32.pth"
|
||||
old_modeldir = os.path.dirname(os.path.realpath(__file__))
|
||||
modeldir = os.path.join(models_path, "mlsd")
|
||||
|
||||
def unload_mlsd_model():
|
||||
global mlsdmodel
|
||||
if mlsdmodel is not None:
|
||||
mlsdmodel = mlsdmodel.cpu()
|
||||
|
||||
def apply_mlsd(input_image, thr_v, thr_d):
|
||||
global modelpath, mlsdmodel
|
||||
if mlsdmodel is None:
|
||||
modelpath = os.path.join(modeldir, "mlsd_large_512_fp32.pth")
|
||||
old_modelpath = os.path.join(old_modeldir, "mlsd_large_512_fp32.pth")
|
||||
if os.path.exists(old_modelpath):
|
||||
modelpath = old_modelpath
|
||||
elif not os.path.exists(modelpath):
|
||||
from basicsr.utils.download_util import load_file_from_url
|
||||
load_file_from_url(remote_model_path, model_dir=modeldir)
|
||||
mlsdmodel = MobileV2_MLSD_Large()
|
||||
mlsdmodel.load_state_dict(torch.load(modelpath), strict=True)
|
||||
mlsdmodel = mlsdmodel.to(devices.get_device_for("controlnet")).eval()
|
||||
|
||||
model = mlsdmodel
|
||||
assert input_image.ndim == 3
|
||||
img = input_image
|
||||
img_output = np.zeros_like(img)
|
||||
try:
|
||||
with torch.no_grad():
|
||||
lines = pred_lines(img, model, [img.shape[0], img.shape[1]], thr_v, thr_d)
|
||||
for line in lines:
|
||||
x_start, y_start, x_end, y_end = [int(val) for val in line]
|
||||
cv2.line(img_output, (x_start, y_start), (x_end, y_end), [255, 255, 255], 1)
|
||||
except Exception as e:
|
||||
pass
|
||||
return img_output[:, :, 0]
|
||||
@@ -0,0 +1,292 @@
|
||||
import os
|
||||
import sys
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.utils.model_zoo as model_zoo
|
||||
from torch.nn import functional as F
|
||||
|
||||
|
||||
class BlockTypeA(nn.Module):
|
||||
def __init__(self, in_c1, in_c2, out_c1, out_c2, upscale = True):
|
||||
super(BlockTypeA, self).__init__()
|
||||
self.conv1 = nn.Sequential(
|
||||
nn.Conv2d(in_c2, out_c2, kernel_size=1),
|
||||
nn.BatchNorm2d(out_c2),
|
||||
nn.ReLU(inplace=True)
|
||||
)
|
||||
self.conv2 = nn.Sequential(
|
||||
nn.Conv2d(in_c1, out_c1, kernel_size=1),
|
||||
nn.BatchNorm2d(out_c1),
|
||||
nn.ReLU(inplace=True)
|
||||
)
|
||||
self.upscale = upscale
|
||||
|
||||
def forward(self, a, b):
|
||||
b = self.conv1(b)
|
||||
a = self.conv2(a)
|
||||
if self.upscale:
|
||||
b = F.interpolate(b, scale_factor=2.0, mode='bilinear', align_corners=True)
|
||||
return torch.cat((a, b), dim=1)
|
||||
|
||||
|
||||
class BlockTypeB(nn.Module):
|
||||
def __init__(self, in_c, out_c):
|
||||
super(BlockTypeB, self).__init__()
|
||||
self.conv1 = nn.Sequential(
|
||||
nn.Conv2d(in_c, in_c, kernel_size=3, padding=1),
|
||||
nn.BatchNorm2d(in_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
self.conv2 = nn.Sequential(
|
||||
nn.Conv2d(in_c, out_c, kernel_size=3, padding=1),
|
||||
nn.BatchNorm2d(out_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
x = self.conv1(x) + x
|
||||
x = self.conv2(x)
|
||||
return x
|
||||
|
||||
class BlockTypeC(nn.Module):
|
||||
def __init__(self, in_c, out_c):
|
||||
super(BlockTypeC, self).__init__()
|
||||
self.conv1 = nn.Sequential(
|
||||
nn.Conv2d(in_c, in_c, kernel_size=3, padding=5, dilation=5),
|
||||
nn.BatchNorm2d(in_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
self.conv2 = nn.Sequential(
|
||||
nn.Conv2d(in_c, in_c, kernel_size=3, padding=1),
|
||||
nn.BatchNorm2d(in_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
self.conv3 = nn.Conv2d(in_c, out_c, kernel_size=1)
|
||||
|
||||
def forward(self, x):
|
||||
x = self.conv1(x)
|
||||
x = self.conv2(x)
|
||||
x = self.conv3(x)
|
||||
return x
|
||||
|
||||
def _make_divisible(v, divisor, min_value=None):
|
||||
"""
|
||||
This function is taken from the original tf repo.
|
||||
It ensures that all layers have a channel number that is divisible by 8
|
||||
It can be seen here:
|
||||
https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py
|
||||
:param v:
|
||||
:param divisor:
|
||||
:param min_value:
|
||||
:return:
|
||||
"""
|
||||
if min_value is None:
|
||||
min_value = divisor
|
||||
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
|
||||
# Make sure that round down does not go down by more than 10%.
|
||||
if new_v < 0.9 * v:
|
||||
new_v += divisor
|
||||
return new_v
|
||||
|
||||
|
||||
class ConvBNReLU(nn.Sequential):
|
||||
def __init__(self, in_planes, out_planes, kernel_size=3, stride=1, groups=1):
|
||||
self.channel_pad = out_planes - in_planes
|
||||
self.stride = stride
|
||||
#padding = (kernel_size - 1) // 2
|
||||
|
||||
# TFLite uses slightly different padding than PyTorch
|
||||
if stride == 2:
|
||||
padding = 0
|
||||
else:
|
||||
padding = (kernel_size - 1) // 2
|
||||
|
||||
super(ConvBNReLU, self).__init__(
|
||||
nn.Conv2d(in_planes, out_planes, kernel_size, stride, padding, groups=groups, bias=False),
|
||||
nn.BatchNorm2d(out_planes),
|
||||
nn.ReLU6(inplace=True)
|
||||
)
|
||||
self.max_pool = nn.MaxPool2d(kernel_size=stride, stride=stride)
|
||||
|
||||
|
||||
def forward(self, x):
|
||||
# TFLite uses different padding
|
||||
if self.stride == 2:
|
||||
x = F.pad(x, (0, 1, 0, 1), "constant", 0)
|
||||
#print(x.shape)
|
||||
|
||||
for module in self:
|
||||
if not isinstance(module, nn.MaxPool2d):
|
||||
x = module(x)
|
||||
return x
|
||||
|
||||
|
||||
class InvertedResidual(nn.Module):
|
||||
def __init__(self, inp, oup, stride, expand_ratio):
|
||||
super(InvertedResidual, self).__init__()
|
||||
self.stride = stride
|
||||
assert stride in [1, 2]
|
||||
|
||||
hidden_dim = int(round(inp * expand_ratio))
|
||||
self.use_res_connect = self.stride == 1 and inp == oup
|
||||
|
||||
layers = []
|
||||
if expand_ratio != 1:
|
||||
# pw
|
||||
layers.append(ConvBNReLU(inp, hidden_dim, kernel_size=1))
|
||||
layers.extend([
|
||||
# dw
|
||||
ConvBNReLU(hidden_dim, hidden_dim, stride=stride, groups=hidden_dim),
|
||||
# pw-linear
|
||||
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
|
||||
nn.BatchNorm2d(oup),
|
||||
])
|
||||
self.conv = nn.Sequential(*layers)
|
||||
|
||||
def forward(self, x):
|
||||
if self.use_res_connect:
|
||||
return x + self.conv(x)
|
||||
else:
|
||||
return self.conv(x)
|
||||
|
||||
|
||||
class MobileNetV2(nn.Module):
|
||||
def __init__(self, pretrained=True):
|
||||
"""
|
||||
MobileNet V2 main class
|
||||
Args:
|
||||
num_classes (int): Number of classes
|
||||
width_mult (float): Width multiplier - adjusts number of channels in each layer by this amount
|
||||
inverted_residual_setting: Network structure
|
||||
round_nearest (int): Round the number of channels in each layer to be a multiple of this number
|
||||
Set to 1 to turn off rounding
|
||||
block: Module specifying inverted residual building block for mobilenet
|
||||
"""
|
||||
super(MobileNetV2, self).__init__()
|
||||
|
||||
block = InvertedResidual
|
||||
input_channel = 32
|
||||
last_channel = 1280
|
||||
width_mult = 1.0
|
||||
round_nearest = 8
|
||||
|
||||
inverted_residual_setting = [
|
||||
# t, c, n, s
|
||||
[1, 16, 1, 1],
|
||||
[6, 24, 2, 2],
|
||||
[6, 32, 3, 2],
|
||||
[6, 64, 4, 2],
|
||||
[6, 96, 3, 1],
|
||||
#[6, 160, 3, 2],
|
||||
#[6, 320, 1, 1],
|
||||
]
|
||||
|
||||
# only check the first element, assuming user knows t,c,n,s are required
|
||||
if len(inverted_residual_setting) == 0 or len(inverted_residual_setting[0]) != 4:
|
||||
raise ValueError("inverted_residual_setting should be non-empty "
|
||||
"or a 4-element list, got {}".format(inverted_residual_setting))
|
||||
|
||||
# building first layer
|
||||
input_channel = _make_divisible(input_channel * width_mult, round_nearest)
|
||||
self.last_channel = _make_divisible(last_channel * max(1.0, width_mult), round_nearest)
|
||||
features = [ConvBNReLU(4, input_channel, stride=2)]
|
||||
# building inverted residual blocks
|
||||
for t, c, n, s in inverted_residual_setting:
|
||||
output_channel = _make_divisible(c * width_mult, round_nearest)
|
||||
for i in range(n):
|
||||
stride = s if i == 0 else 1
|
||||
features.append(block(input_channel, output_channel, stride, expand_ratio=t))
|
||||
input_channel = output_channel
|
||||
|
||||
self.features = nn.Sequential(*features)
|
||||
self.fpn_selected = [1, 3, 6, 10, 13]
|
||||
# weight initialization
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
nn.init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
if m.bias is not None:
|
||||
nn.init.zeros_(m.bias)
|
||||
elif isinstance(m, nn.BatchNorm2d):
|
||||
nn.init.ones_(m.weight)
|
||||
nn.init.zeros_(m.bias)
|
||||
elif isinstance(m, nn.Linear):
|
||||
nn.init.normal_(m.weight, 0, 0.01)
|
||||
nn.init.zeros_(m.bias)
|
||||
if pretrained:
|
||||
self._load_pretrained_model()
|
||||
|
||||
def _forward_impl(self, x):
|
||||
# This exists since TorchScript doesn't support inheritance, so the superclass method
|
||||
# (this one) needs to have a name other than `forward` that can be accessed in a subclass
|
||||
fpn_features = []
|
||||
for i, f in enumerate(self.features):
|
||||
if i > self.fpn_selected[-1]:
|
||||
break
|
||||
x = f(x)
|
||||
if i in self.fpn_selected:
|
||||
fpn_features.append(x)
|
||||
|
||||
c1, c2, c3, c4, c5 = fpn_features
|
||||
return c1, c2, c3, c4, c5
|
||||
|
||||
|
||||
def forward(self, x):
|
||||
return self._forward_impl(x)
|
||||
|
||||
def _load_pretrained_model(self):
|
||||
pretrain_dict = model_zoo.load_url('https://download.pytorch.org/models/mobilenet_v2-b0353104.pth')
|
||||
model_dict = {}
|
||||
state_dict = self.state_dict()
|
||||
for k, v in pretrain_dict.items():
|
||||
if k in state_dict:
|
||||
model_dict[k] = v
|
||||
state_dict.update(model_dict)
|
||||
self.load_state_dict(state_dict)
|
||||
|
||||
|
||||
class MobileV2_MLSD_Large(nn.Module):
|
||||
def __init__(self):
|
||||
super(MobileV2_MLSD_Large, self).__init__()
|
||||
|
||||
self.backbone = MobileNetV2(pretrained=False)
|
||||
## A, B
|
||||
self.block15 = BlockTypeA(in_c1= 64, in_c2= 96,
|
||||
out_c1= 64, out_c2=64,
|
||||
upscale=False)
|
||||
self.block16 = BlockTypeB(128, 64)
|
||||
|
||||
## A, B
|
||||
self.block17 = BlockTypeA(in_c1 = 32, in_c2 = 64,
|
||||
out_c1= 64, out_c2= 64)
|
||||
self.block18 = BlockTypeB(128, 64)
|
||||
|
||||
## A, B
|
||||
self.block19 = BlockTypeA(in_c1=24, in_c2=64,
|
||||
out_c1=64, out_c2=64)
|
||||
self.block20 = BlockTypeB(128, 64)
|
||||
|
||||
## A, B, C
|
||||
self.block21 = BlockTypeA(in_c1=16, in_c2=64,
|
||||
out_c1=64, out_c2=64)
|
||||
self.block22 = BlockTypeB(128, 64)
|
||||
|
||||
self.block23 = BlockTypeC(64, 16)
|
||||
|
||||
def forward(self, x):
|
||||
c1, c2, c3, c4, c5 = self.backbone(x)
|
||||
|
||||
x = self.block15(c4, c5)
|
||||
x = self.block16(x)
|
||||
|
||||
x = self.block17(c3, x)
|
||||
x = self.block18(x)
|
||||
|
||||
x = self.block19(c2, x)
|
||||
x = self.block20(x)
|
||||
|
||||
x = self.block21(c1, x)
|
||||
x = self.block22(x)
|
||||
x = self.block23(x)
|
||||
x = x[:, 7:, :, :]
|
||||
|
||||
return x
|
||||
@@ -0,0 +1,275 @@
|
||||
import os
|
||||
import sys
|
||||
import torch
|
||||
import torch.nn as nn
|
||||
import torch.utils.model_zoo as model_zoo
|
||||
from torch.nn import functional as F
|
||||
|
||||
|
||||
class BlockTypeA(nn.Module):
|
||||
def __init__(self, in_c1, in_c2, out_c1, out_c2, upscale = True):
|
||||
super(BlockTypeA, self).__init__()
|
||||
self.conv1 = nn.Sequential(
|
||||
nn.Conv2d(in_c2, out_c2, kernel_size=1),
|
||||
nn.BatchNorm2d(out_c2),
|
||||
nn.ReLU(inplace=True)
|
||||
)
|
||||
self.conv2 = nn.Sequential(
|
||||
nn.Conv2d(in_c1, out_c1, kernel_size=1),
|
||||
nn.BatchNorm2d(out_c1),
|
||||
nn.ReLU(inplace=True)
|
||||
)
|
||||
self.upscale = upscale
|
||||
|
||||
def forward(self, a, b):
|
||||
b = self.conv1(b)
|
||||
a = self.conv2(a)
|
||||
b = F.interpolate(b, scale_factor=2.0, mode='bilinear', align_corners=True)
|
||||
return torch.cat((a, b), dim=1)
|
||||
|
||||
|
||||
class BlockTypeB(nn.Module):
|
||||
def __init__(self, in_c, out_c):
|
||||
super(BlockTypeB, self).__init__()
|
||||
self.conv1 = nn.Sequential(
|
||||
nn.Conv2d(in_c, in_c, kernel_size=3, padding=1),
|
||||
nn.BatchNorm2d(in_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
self.conv2 = nn.Sequential(
|
||||
nn.Conv2d(in_c, out_c, kernel_size=3, padding=1),
|
||||
nn.BatchNorm2d(out_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
|
||||
def forward(self, x):
|
||||
x = self.conv1(x) + x
|
||||
x = self.conv2(x)
|
||||
return x
|
||||
|
||||
class BlockTypeC(nn.Module):
|
||||
def __init__(self, in_c, out_c):
|
||||
super(BlockTypeC, self).__init__()
|
||||
self.conv1 = nn.Sequential(
|
||||
nn.Conv2d(in_c, in_c, kernel_size=3, padding=5, dilation=5),
|
||||
nn.BatchNorm2d(in_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
self.conv2 = nn.Sequential(
|
||||
nn.Conv2d(in_c, in_c, kernel_size=3, padding=1),
|
||||
nn.BatchNorm2d(in_c),
|
||||
nn.ReLU()
|
||||
)
|
||||
self.conv3 = nn.Conv2d(in_c, out_c, kernel_size=1)
|
||||
|
||||
def forward(self, x):
|
||||
x = self.conv1(x)
|
||||
x = self.conv2(x)
|
||||
x = self.conv3(x)
|
||||
return x
|
||||
|
||||
def _make_divisible(v, divisor, min_value=None):
|
||||
"""
|
||||
This function is taken from the original tf repo.
|
||||
It ensures that all layers have a channel number that is divisible by 8
|
||||
It can be seen here:
|
||||
https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py
|
||||
:param v:
|
||||
:param divisor:
|
||||
:param min_value:
|
||||
:return:
|
||||
"""
|
||||
if min_value is None:
|
||||
min_value = divisor
|
||||
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
|
||||
# Make sure that round down does not go down by more than 10%.
|
||||
if new_v < 0.9 * v:
|
||||
new_v += divisor
|
||||
return new_v
|
||||
|
||||
|
||||
class ConvBNReLU(nn.Sequential):
|
||||
def __init__(self, in_planes, out_planes, kernel_size=3, stride=1, groups=1):
|
||||
self.channel_pad = out_planes - in_planes
|
||||
self.stride = stride
|
||||
#padding = (kernel_size - 1) // 2
|
||||
|
||||
# TFLite uses slightly different padding than PyTorch
|
||||
if stride == 2:
|
||||
padding = 0
|
||||
else:
|
||||
padding = (kernel_size - 1) // 2
|
||||
|
||||
super(ConvBNReLU, self).__init__(
|
||||
nn.Conv2d(in_planes, out_planes, kernel_size, stride, padding, groups=groups, bias=False),
|
||||
nn.BatchNorm2d(out_planes),
|
||||
nn.ReLU6(inplace=True)
|
||||
)
|
||||
self.max_pool = nn.MaxPool2d(kernel_size=stride, stride=stride)
|
||||
|
||||
|
||||
def forward(self, x):
|
||||
# TFLite uses different padding
|
||||
if self.stride == 2:
|
||||
x = F.pad(x, (0, 1, 0, 1), "constant", 0)
|
||||
#print(x.shape)
|
||||
|
||||
for module in self:
|
||||
if not isinstance(module, nn.MaxPool2d):
|
||||
x = module(x)
|
||||
return x
|
||||
|
||||
|
||||
class InvertedResidual(nn.Module):
|
||||
def __init__(self, inp, oup, stride, expand_ratio):
|
||||
super(InvertedResidual, self).__init__()
|
||||
self.stride = stride
|
||||
assert stride in [1, 2]
|
||||
|
||||
hidden_dim = int(round(inp * expand_ratio))
|
||||
self.use_res_connect = self.stride == 1 and inp == oup
|
||||
|
||||
layers = []
|
||||
if expand_ratio != 1:
|
||||
# pw
|
||||
layers.append(ConvBNReLU(inp, hidden_dim, kernel_size=1))
|
||||
layers.extend([
|
||||
# dw
|
||||
ConvBNReLU(hidden_dim, hidden_dim, stride=stride, groups=hidden_dim),
|
||||
# pw-linear
|
||||
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
|
||||
nn.BatchNorm2d(oup),
|
||||
])
|
||||
self.conv = nn.Sequential(*layers)
|
||||
|
||||
def forward(self, x):
|
||||
if self.use_res_connect:
|
||||
return x + self.conv(x)
|
||||
else:
|
||||
return self.conv(x)
|
||||
|
||||
|
||||
class MobileNetV2(nn.Module):
|
||||
def __init__(self, pretrained=True):
|
||||
"""
|
||||
MobileNet V2 main class
|
||||
Args:
|
||||
num_classes (int): Number of classes
|
||||
width_mult (float): Width multiplier - adjusts number of channels in each layer by this amount
|
||||
inverted_residual_setting: Network structure
|
||||
round_nearest (int): Round the number of channels in each layer to be a multiple of this number
|
||||
Set to 1 to turn off rounding
|
||||
block: Module specifying inverted residual building block for mobilenet
|
||||
"""
|
||||
super(MobileNetV2, self).__init__()
|
||||
|
||||
block = InvertedResidual
|
||||
input_channel = 32
|
||||
last_channel = 1280
|
||||
width_mult = 1.0
|
||||
round_nearest = 8
|
||||
|
||||
inverted_residual_setting = [
|
||||
# t, c, n, s
|
||||
[1, 16, 1, 1],
|
||||
[6, 24, 2, 2],
|
||||
[6, 32, 3, 2],
|
||||
[6, 64, 4, 2],
|
||||
#[6, 96, 3, 1],
|
||||
#[6, 160, 3, 2],
|
||||
#[6, 320, 1, 1],
|
||||
]
|
||||
|
||||
# only check the first element, assuming user knows t,c,n,s are required
|
||||
if len(inverted_residual_setting) == 0 or len(inverted_residual_setting[0]) != 4:
|
||||
raise ValueError("inverted_residual_setting should be non-empty "
|
||||
"or a 4-element list, got {}".format(inverted_residual_setting))
|
||||
|
||||
# building first layer
|
||||
input_channel = _make_divisible(input_channel * width_mult, round_nearest)
|
||||
self.last_channel = _make_divisible(last_channel * max(1.0, width_mult), round_nearest)
|
||||
features = [ConvBNReLU(4, input_channel, stride=2)]
|
||||
# building inverted residual blocks
|
||||
for t, c, n, s in inverted_residual_setting:
|
||||
output_channel = _make_divisible(c * width_mult, round_nearest)
|
||||
for i in range(n):
|
||||
stride = s if i == 0 else 1
|
||||
features.append(block(input_channel, output_channel, stride, expand_ratio=t))
|
||||
input_channel = output_channel
|
||||
self.features = nn.Sequential(*features)
|
||||
|
||||
self.fpn_selected = [3, 6, 10]
|
||||
# weight initialization
|
||||
for m in self.modules():
|
||||
if isinstance(m, nn.Conv2d):
|
||||
nn.init.kaiming_normal_(m.weight, mode='fan_out')
|
||||
if m.bias is not None:
|
||||
nn.init.zeros_(m.bias)
|
||||
elif isinstance(m, nn.BatchNorm2d):
|
||||
nn.init.ones_(m.weight)
|
||||
nn.init.zeros_(m.bias)
|
||||
elif isinstance(m, nn.Linear):
|
||||
nn.init.normal_(m.weight, 0, 0.01)
|
||||
nn.init.zeros_(m.bias)
|
||||
|
||||
#if pretrained:
|
||||
# self._load_pretrained_model()
|
||||
|
||||
def _forward_impl(self, x):
|
||||
# This exists since TorchScript doesn't support inheritance, so the superclass method
|
||||
# (this one) needs to have a name other than `forward` that can be accessed in a subclass
|
||||
fpn_features = []
|
||||
for i, f in enumerate(self.features):
|
||||
if i > self.fpn_selected[-1]:
|
||||
break
|
||||
x = f(x)
|
||||
if i in self.fpn_selected:
|
||||
fpn_features.append(x)
|
||||
|
||||
c2, c3, c4 = fpn_features
|
||||
return c2, c3, c4
|
||||
|
||||
|
||||
def forward(self, x):
|
||||
return self._forward_impl(x)
|
||||
|
||||
def _load_pretrained_model(self):
|
||||
pretrain_dict = model_zoo.load_url('https://download.pytorch.org/models/mobilenet_v2-b0353104.pth')
|
||||
model_dict = {}
|
||||
state_dict = self.state_dict()
|
||||
for k, v in pretrain_dict.items():
|
||||
if k in state_dict:
|
||||
model_dict[k] = v
|
||||
state_dict.update(model_dict)
|
||||
self.load_state_dict(state_dict)
|
||||
|
||||
|
||||
class MobileV2_MLSD_Tiny(nn.Module):
|
||||
def __init__(self):
|
||||
super(MobileV2_MLSD_Tiny, self).__init__()
|
||||
|
||||
self.backbone = MobileNetV2(pretrained=True)
|
||||
|
||||
self.block12 = BlockTypeA(in_c1= 32, in_c2= 64,
|
||||
out_c1= 64, out_c2=64)
|
||||
self.block13 = BlockTypeB(128, 64)
|
||||
|
||||
self.block14 = BlockTypeA(in_c1 = 24, in_c2 = 64,
|
||||
out_c1= 32, out_c2= 32)
|
||||
self.block15 = BlockTypeB(64, 64)
|
||||
|
||||
self.block16 = BlockTypeC(64, 16)
|
||||
|
||||
def forward(self, x):
|
||||
c2, c3, c4 = self.backbone(x)
|
||||
|
||||
x = self.block12(c3, c4)
|
||||
x = self.block13(x)
|
||||
x = self.block14(c2, x)
|
||||
x = self.block15(x)
|
||||
x = self.block16(x)
|
||||
x = x[:, 7:, :, :]
|
||||
#print(x.shape)
|
||||
x = F.interpolate(x, scale_factor=2.0, mode='bilinear', align_corners=True)
|
||||
|
||||
return x
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user